
一种基于裁床的裁切刀位控制方法.pdf

春兰****89


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于裁床的裁切刀位控制方法.pdf
一种基于裁床的裁切刀位控制方法,包括以下步骤:(1)已知裁切曲线轨迹C(t),按误差δ对其进行分段曲线拟合,得到m条直线(l1,l2,...,lm),n个圆弧(r1,r2,...,rn),拟合得到的曲线:对于,存在0<δ<Δ,0<|P(t)-C(t)|<δ,于是得到待拟合的实际直刀要走的曲线轨迹的计算公式;(2)所述圆弧曲线轨迹包括以下两类:a.第一类轨迹为相对于切掉方向的凸弧;b.第二类轨迹为相对于切掉方向的凹弧,采用等误差逼近法处理第一类轨迹,采用等步长逼近法与等误差逼近法相结合处理第二类轨迹,保证切

一种裁床换刀系统及其控制方法.pdf
本发明涉及了一种裁床换刀系统及其控制方法,包括换刀装置,检测装置和控制装置,换刀装置包括锁刀组件和刀库组件,刀库组件包括刀库本体、刀匣机构、送刀机构和触发单元,本系统及其控制方法,实现裁床刀片在失效之后,实现刀片的自动更换,且只需要通过更换原刀片的紧定螺钉,就可以对原裁床进行改装和加装,实现自动换刀的功能升级,并能够通过检测装置进行实时在线检测刀片状态,避免刀片失效后还在工作,导致产生过多的废料,代替了人工进行刀片状态监督和刀片更换,可以大大提高裁剪质量和效率,减少废料的产生,降低生产成本,降低人工换刀的
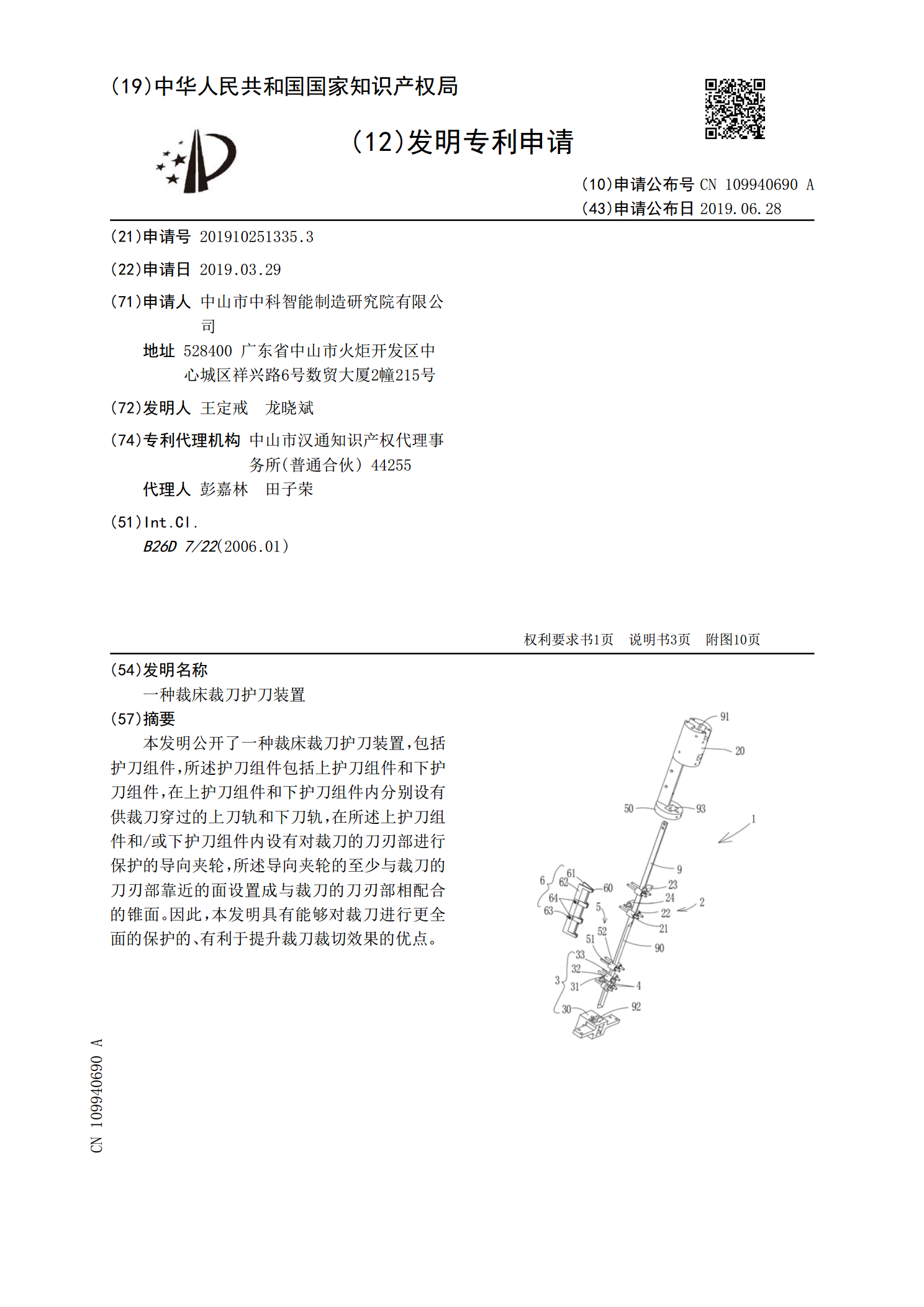
一种裁床裁刀护刀装置.pdf
本发明公开了一种裁床裁刀护刀装置,包括护刀组件,所述护刀组件包括上护刀组件和下护刀组件,在上护刀组件和下护刀组件内分别设有供裁刀穿过的上刀轨和下刀轨,在所述上护刀组件和/或下护刀组件内设有对裁刀的刀刃部进行保护的导向夹轮,所述导向夹轮的至少与裁刀的刀刃部靠近的面设置成与裁刀的刀刃部相配合的锥面。因此,本发明具有能够对裁刀进行更全面的保护的、有利于提升裁刀裁切效果的优点。
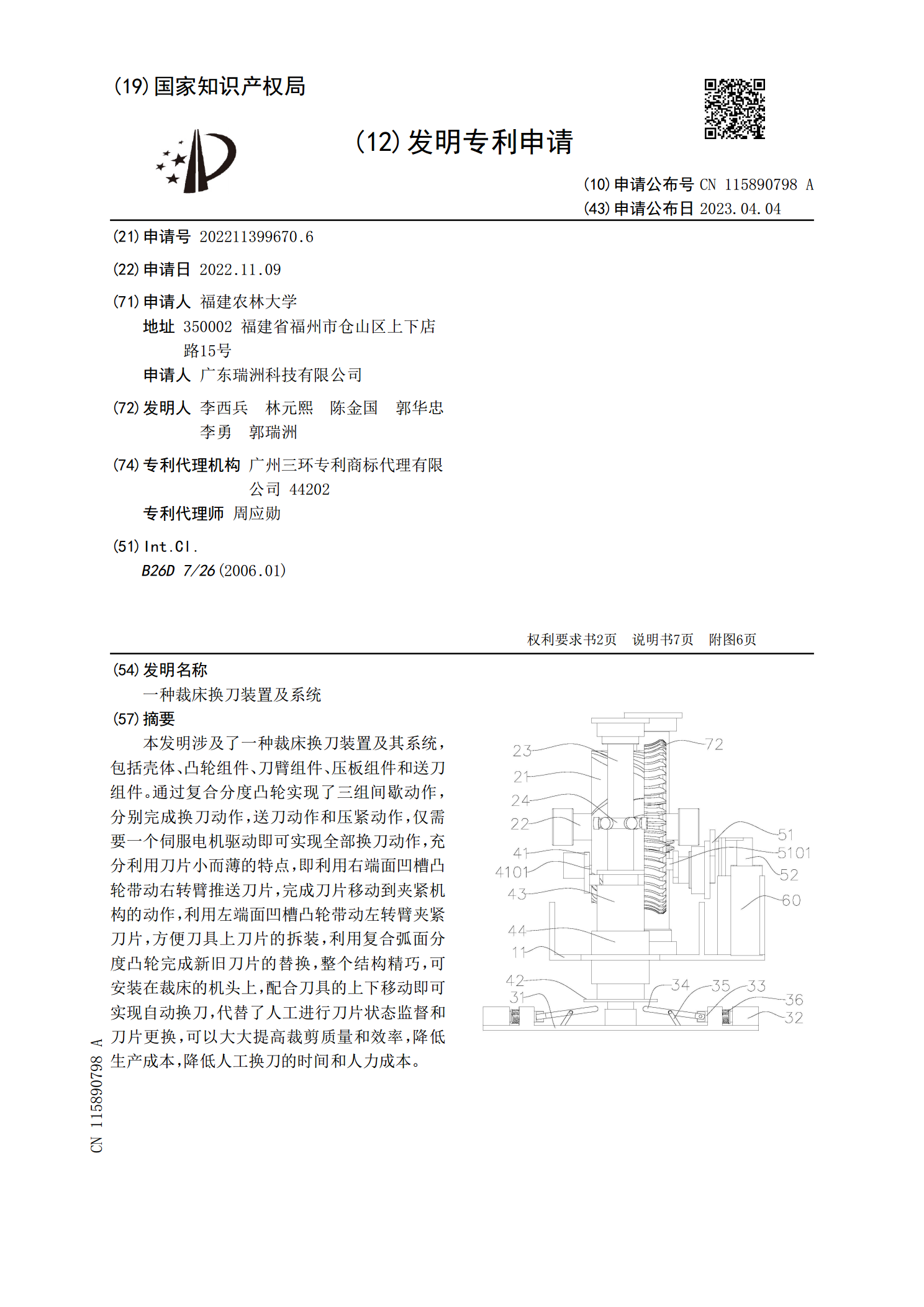
一种裁床换刀装置及系统.pdf
本发明涉及了一种裁床换刀装置及其系统,包括壳体、凸轮组件、刀臂组件、压板组件和送刀组件。通过复合分度凸轮实现了三组间歇动作,分别完成换刀动作,送刀动作和压紧动作,仅需要一个伺服电机驱动即可实现全部换刀动作,充分利用刀片小而薄的特点,即利用右端面凹槽凸轮带动右转臂推送刀片,完成刀片移动到夹紧机构的动作,利用左端面凹槽凸轮带动左转臂夹紧刀片,方便刀具上刀片的拆装,利用复合弧面分度凸轮完成新旧刀片的替换,整个结构精巧,可安装在裁床的机头上,配合刀具的上下移动即可实现自动换刀,代替了人工进行刀片状态监督和刀片更换
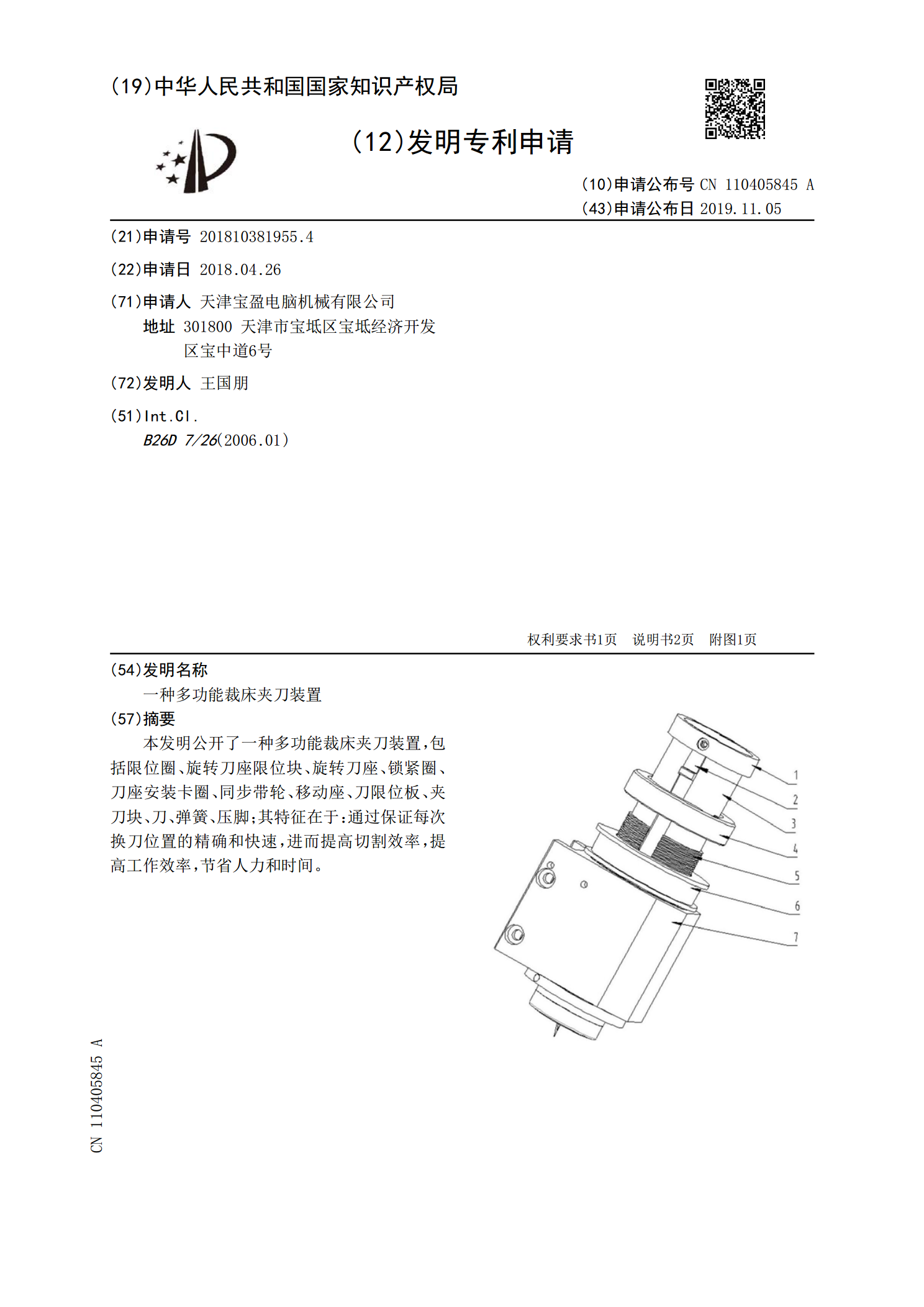
一种多功能裁床夹刀装置.pdf
本发明公开了一种多功能裁床夹刀装置,包括限位圈、旋转刀座限位块、旋转刀座、锁紧圈、刀座安装卡圈、同步带轮、移动座、刀限位板、夹刀块、刀、弹簧、压脚;其特征在于:通过保证每次换刀位置的精确和快速,进而提高切割效率,提高工作效率,节省人力和时间。