
一种内径测量管道机器人.pdf

文库****坚白


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种内径测量管道机器人.pdf
本发明涉及一种内径测量管道机器人,包括支撑机构、主驱动机构、激光测量机构。所述的支撑机构,主要由滚珠丝杠螺母、步进电机I、车轮、连杆和推杆等组成。所述主驱动机构,主要由蜗轮、蜗杆、带轮、传动带等组成,由步进电机II驱动以实现机器的直线运动。所述的激光测量机构,主要由传感测头,传感器支架和步进电机III组成。本发明所述管道机器人,可以对长管道的内径进行测量,尤其适于内径范围较大的细长管的测量要求,不仅能为不同尺寸的管道内径进行非接触式测量,还可以通过更换传感器测头实现多种测量,如探伤检测等,且具有测量精度高

一种自动适应管道内径的清洁机器人.pdf
本发明涉及一种自动适应管道内径的清洁机器人,包括中心架体、超声波装置、打扫装置、控制装置、多个沿着管道内壁滚动的滚轮装置;多个滚轮装置沿着圆周方向均匀设置在中心架体上,超声波装置安装在中心架体的前端,打扫装置安装在中心架体的后端;超声波装置、打扫装置、滚轮装置均与控制装置信号连接。本发明能自动适应管道内径的变化并能实现拐弯的功能,属于清洁机器人的技术领域。
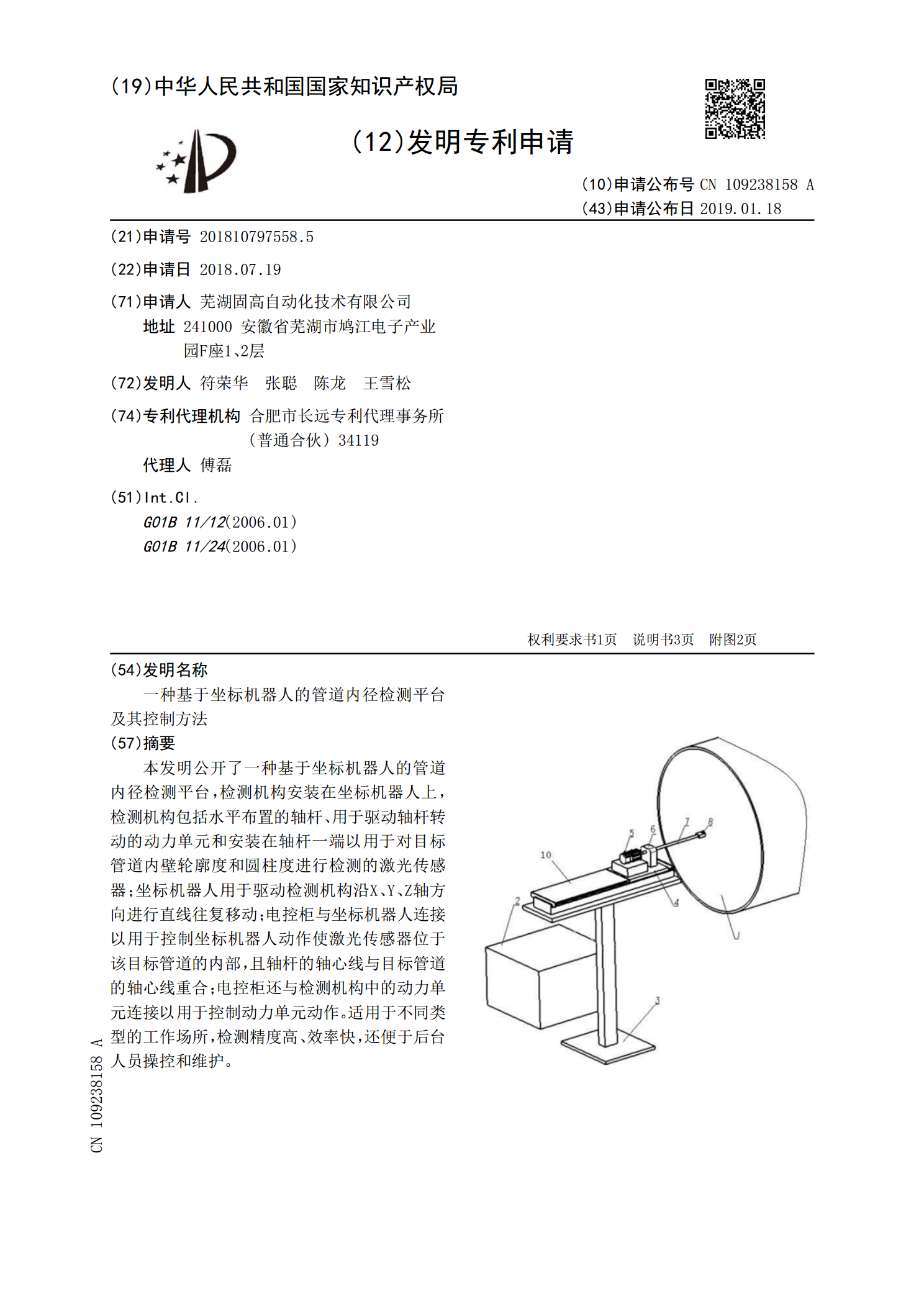
一种基于坐标机器人的管道内径检测平台及其控制方法.pdf
本发明公开了一种基于坐标机器人的管道内径检测平台,检测机构安装在坐标机器人上,检测机构包括水平布置的轴杆、用于驱动轴杆转动的动力单元和安装在轴杆一端以用于对目标管道内壁轮廓度和圆柱度进行检测的激光传感器;坐标机器人用于驱动检测机构沿X、Y、Z轴方向进行直线往复移动;电控柜与坐标机器人连接以用于控制坐标机器人动作使激光传感器位于该目标管道的内部,且轴杆的轴心线与目标管道的轴心线重合;电控柜还与检测机构中的动力单元连接以用于控制动力单元动作。适用于不同类型的工作场所,检测精度高、效率快,还便于后台人员操控和维

一种圆形管道内径检测装置.pdf
本发明涉及一种检测装置,尤其涉及一种圆形管道内径检测装置。本发明要解决的技术问题是提供一种能够对管道进行固定,使检测更加准确的圆形管道内径检测装置。本发明提供了这样一种圆形管道内径检测装置,包括有底板、左支架、顶板、支座、固定板、第一滑块、限位杆、电动绕线轮、拉线、第一弹簧、电动推杆、第一导杆等;底板顶部左侧设有左支架,左支架顶部设有顶板,顶板底部中间设有电动推杆,电动推杆底端连接有第一导杆,第一导杆上设有两个第一导套。本发明通过弧形夹杆将圆形管道夹住,然后通过限位杆即可将内径测量出来,能够比较直观测量出
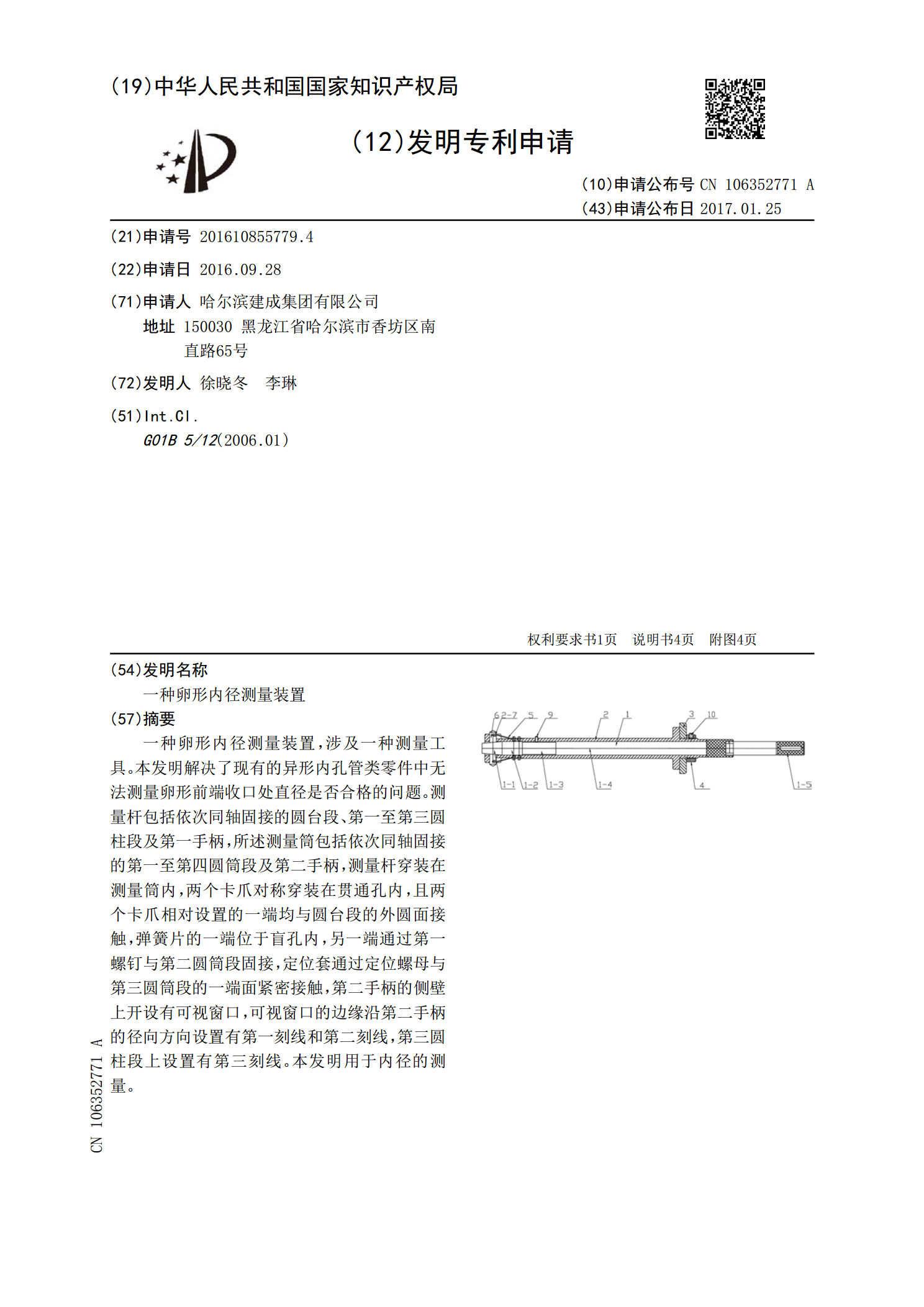
一种卵形内径测量装置.pdf
一种卵形内径测量装置,涉及一种测量工具。本发明解决了现有的异形内孔管类零件中无法测量卵形前端收口处直径是否合格的问题。测量杆包括依次同轴固接的圆台段、第一至第三圆柱段及第一手柄,所述测量筒包括依次同轴固接的第一至第四圆筒段及第二手柄,测量杆穿装在测量筒内,两个卡爪对称穿装在贯通孔内,且两个卡爪相对设置的一端均与圆台段的外圆面接触,弹簧片的一端位于盲孔内,另一端通过第一螺钉与第二圆筒段固接,定位套通过定位螺母与第三圆筒段的一端面紧密接触,第二手柄的侧壁上开设有可视窗口,可视窗口的边缘沿第二手柄的径向方向设置