
一种基于坐标机器人的管道内径检测平台及其控制方法.pdf

是来****文章


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于坐标机器人的管道内径检测平台及其控制方法.pdf
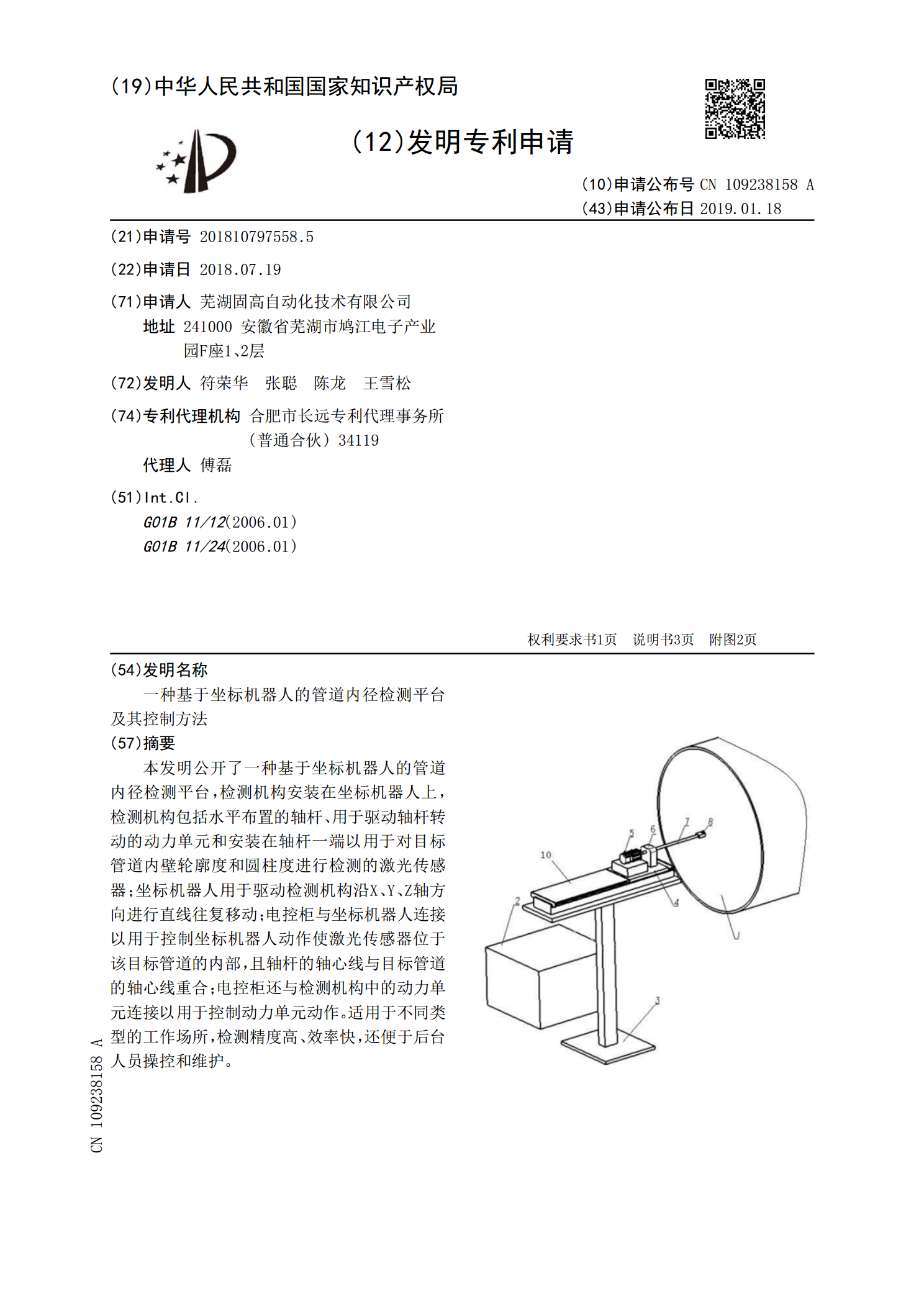
本发明公开了一种基于坐标机器人的管道内径检测平台,检测机构安装在坐标机器人上,检测机构包括水平布置的轴杆、用于驱动轴杆转动的动力单元和安装在轴杆一端以用于对目标管道内壁轮廓度和圆柱度进行检测的激光传感器;坐标机器人用于驱动检测机构沿X、Y、Z轴方向进行直线往复移动;电控柜与坐标机器人连接以用于控制坐标机器人动作使激光传感器位于该目标管道的内部,且轴杆的轴心线与目标管道的轴心线重合;电控柜还与检测机构中的动力单元连接以用于控制动力单元动作。适用于不同类型的工作场所,检测精度高、效率快,还便于后台人员操控和维

一种管道裂纹检测机器人及其控制方法.pdf
本发明公开了一种管道裂纹检测机器人及其控制方法,机器人包括透明的球形外壳;外壳内设置有两侧带轮子的移动平台;移动平台上设置有开关,开关与电源电性连接;电源分别与电机、控制器、微处理器电性连接;控制器与电机电性连接;控制器与微处理器双向连接,微处理器与摄像头双向连接,且微处理器与物联网云平台OneNET通信连接,物联网云平台OneNET与移动终端通信连接;控制器与加速度传感器双向连接;电机的输出轴与轮子的中心轴固接。机器人结构简单、体积较小、易于操作。

一种内径测量管道机器人.pdf
本发明涉及一种内径测量管道机器人,包括支撑机构、主驱动机构、激光测量机构。所述的支撑机构,主要由滚珠丝杠螺母、步进电机I、车轮、连杆和推杆等组成。所述主驱动机构,主要由蜗轮、蜗杆、带轮、传动带等组成,由步进电机II驱动以实现机器的直线运动。所述的激光测量机构,主要由传感测头,传感器支架和步进电机III组成。本发明所述管道机器人,可以对长管道的内径进行测量,尤其适于内径范围较大的细长管的测量要求,不仅能为不同尺寸的管道内径进行非接触式测量,还可以通过更换传感器测头实现多种测量,如探伤检测等,且具有测量精度高
一种管道检测机器人及其检测方法.pdf
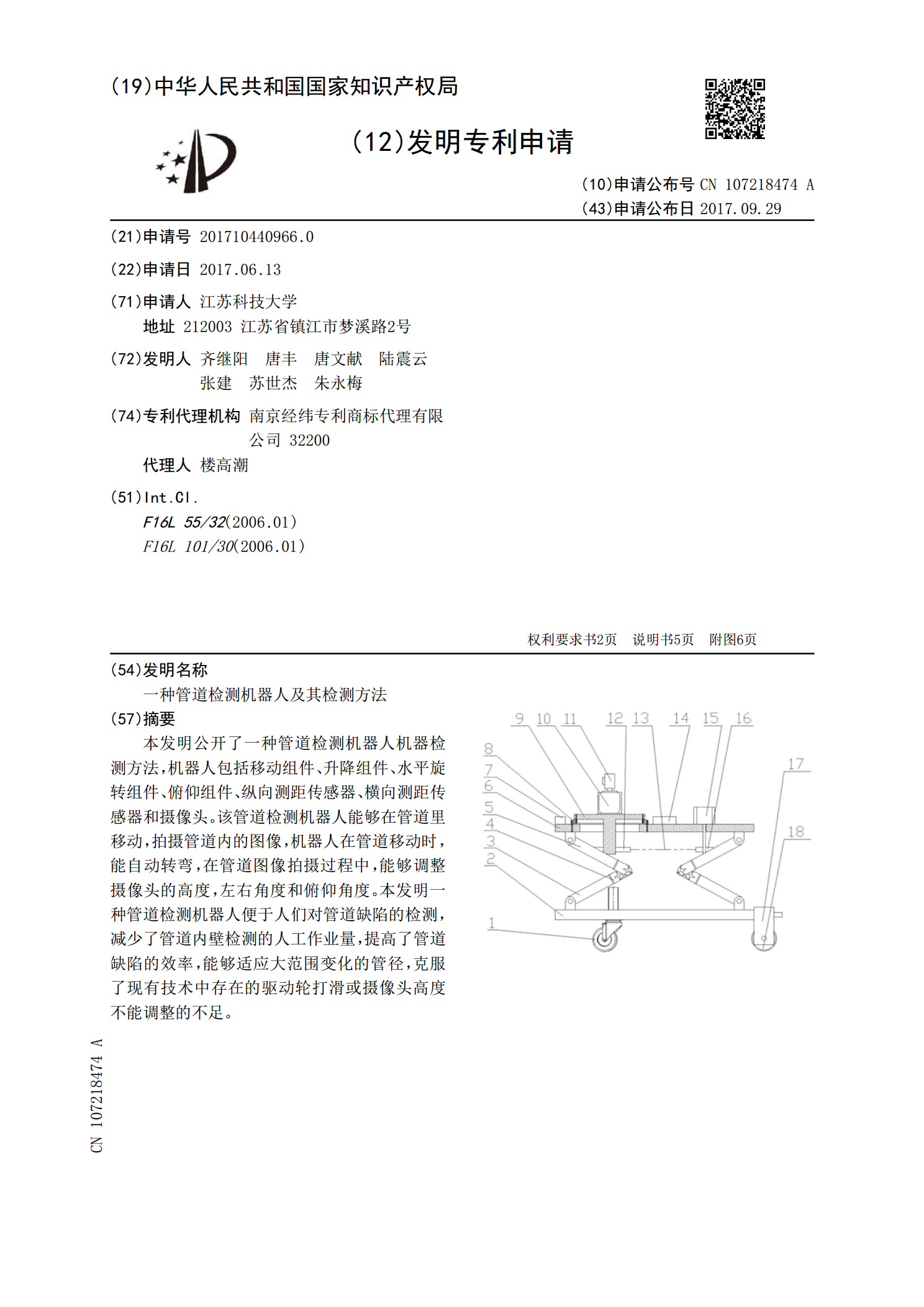
本发明公开了一种管道检测机器人机器检测方法,机器人包括移动组件、升降组件、水平旋转组件、俯仰组件、纵向测距传感器、横向测距传感器和摄像头。该管道检测机器人能够在管道里移动,拍摄管道内的图像,机器人在管道移动时,能自动转弯,在管道图像拍摄过程中,能够调整摄像头的高度,左右角度和俯仰角度。本发明一种管道检测机器人便于人们对管道缺陷的检测,减少了管道内壁检测的人工作业量,提高了管道缺陷的效率,能够适应大范围变化的管径,克服了现有技术中存在的驱动轮打滑或摄像头高度不能调整的不足。
一种管道检测机器人及其检测方法.pdf
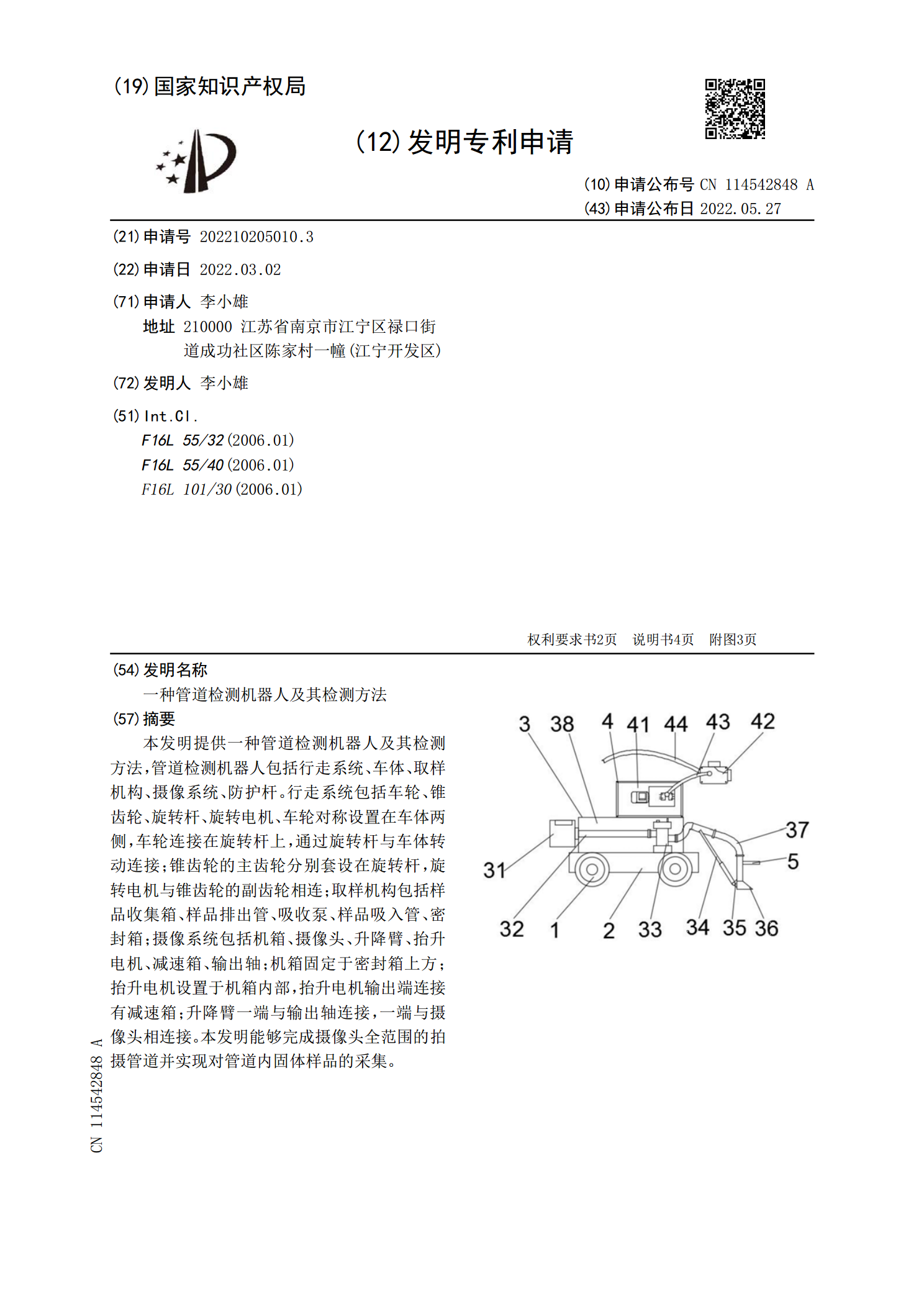
本发明提供一种管道检测机器人及其检测方法,管道检测机器人包括行走系统、车体、取样机构、摄像系统、防护杆。行走系统包括车轮、锥齿轮、旋转杆、旋转电机、车轮对称设置在车体两侧,车轮连接在旋转杆上,通过旋转杆与车体转动连接;锥齿轮的主齿轮分别套设在旋转杆,旋转电机与锥齿轮的副齿轮相连;取样机构包括样品收集箱、样品排出管、吸收泵、样品吸入管、密封箱;摄像系统包括机箱、摄像头、升降臂、抬升电机、减速箱、输出轴;机箱固定于密封箱上方;抬升电机设置于机箱内部,抬升电机输出端连接有减速箱;升降臂一端与输出轴连接,一端与摄