
一种智能汽车及其控制方法.pdf

长春****主a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能汽车及其控制方法.pdf
本发明提供了一种智能汽车,包括:通过旋转单元与车身连接且相对于车身可旋转的底盘;设置在旋转底盘上的多个悬架单元;设置在悬架单元上的车轮,其中每个车轮上设置转向机构和驱动机构,以使每个车轮相对于悬架单元可独立转向并且独立被驱动进行行走;控制器,包括环境传感器、车身传感器、底盘传感器,其中控制器根据环境传感器、车身传感器、底盘传感器检测的信号控制底盘的方位、车轮的方位以实现稳定车身避障、均分车轮载荷、灵活转向控制。本智能汽车具有稳定车身的原车道避障功能,均分车轮负载的功能,更丰富灵活的转向功能,具有更好的稳定
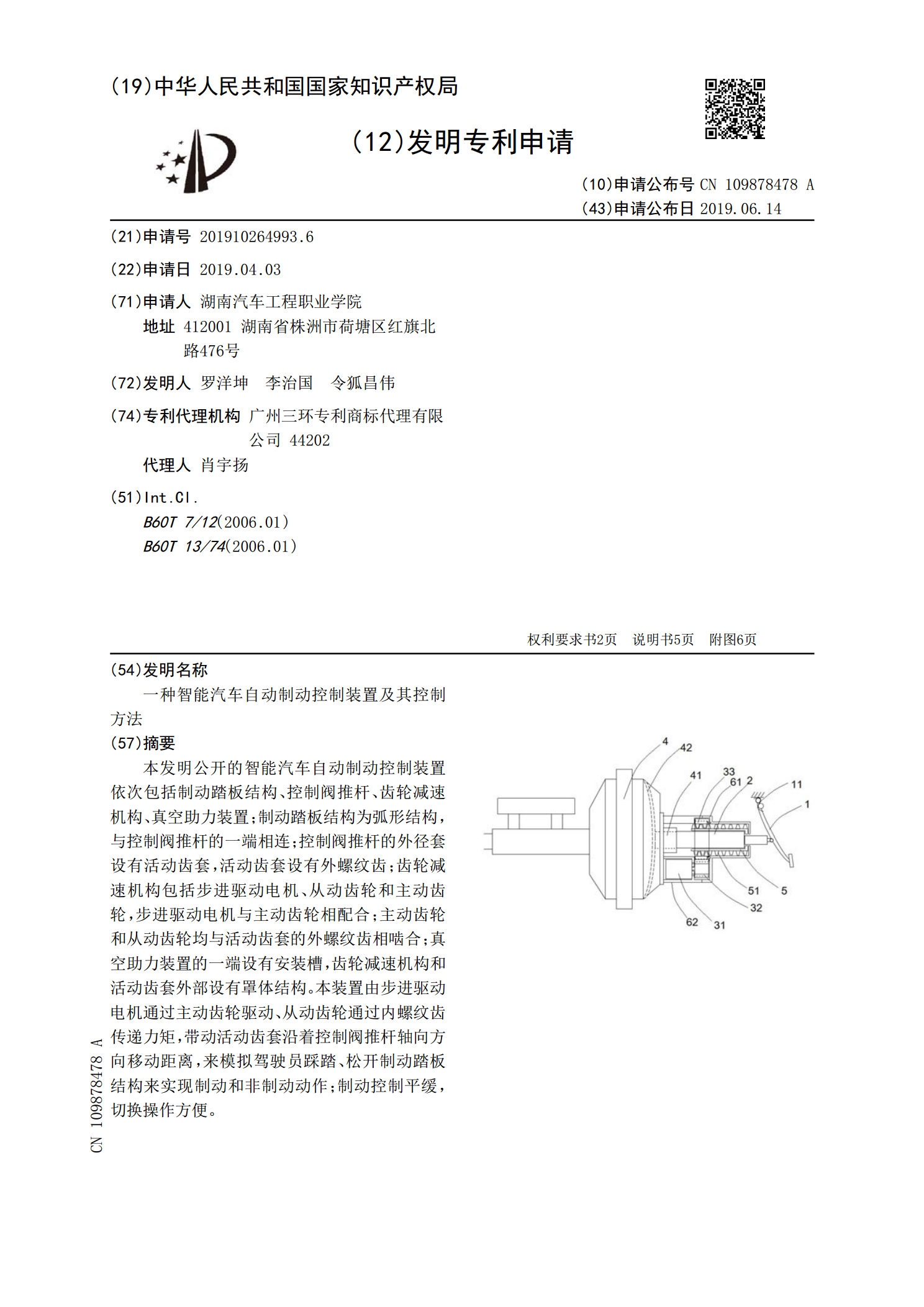
一种智能汽车自动制动控制装置及其控制方法.pdf
本发明公开的智能汽车自动制动控制装置依次包括制动踏板结构、控制阀推杆、齿轮减速机构、真空助力装置;制动踏板结构为弧形结构,与控制阀推杆的一端相连;控制阀推杆的外径套设有活动齿套,活动齿套设有外螺纹齿;齿轮减速机构包括步进驱动电机、从动齿轮和主动齿轮,步进驱动电机与主动齿轮相配合;主动齿轮和从动齿轮均与活动齿套的外螺纹齿相啮合;真空助力装置的一端设有安装槽,齿轮减速机构和活动齿套外部设有罩体结构。本装置由步进驱动电机通过主动齿轮驱动、从动齿轮通过内螺纹齿传递力矩,带动活动齿套沿着控制阀推杆轴向方向移动距离,

一种智能汽车倒车镜及其控制方法.pdf
本发明涉及一种智能汽车倒车镜及其控制方法,包括距离感应装置,汽车倒车镜及仪表盘,其中,所述距离感应装置安装在汽车后保险杠上,用于测量后方一定距离处的移动的物体;所述汽车倒车镜及仪表盘分别通讯连接和/或电连接至距离感应装置并可从距离感应装置接收信号;所述汽车倒车镜及仪表盘用于将所接收信号通过声音,字符,和/或闪光进行显示。给驾驶员尤其是新手驾驶员提供一个量化的数字距离,同时伴有一定的声音提醒信号,提醒是否可以变道,使得在变道时候不至于由于缺乏有效的距离感,盲目变道,造成与后方车辆发生不必要的擦碰事故。
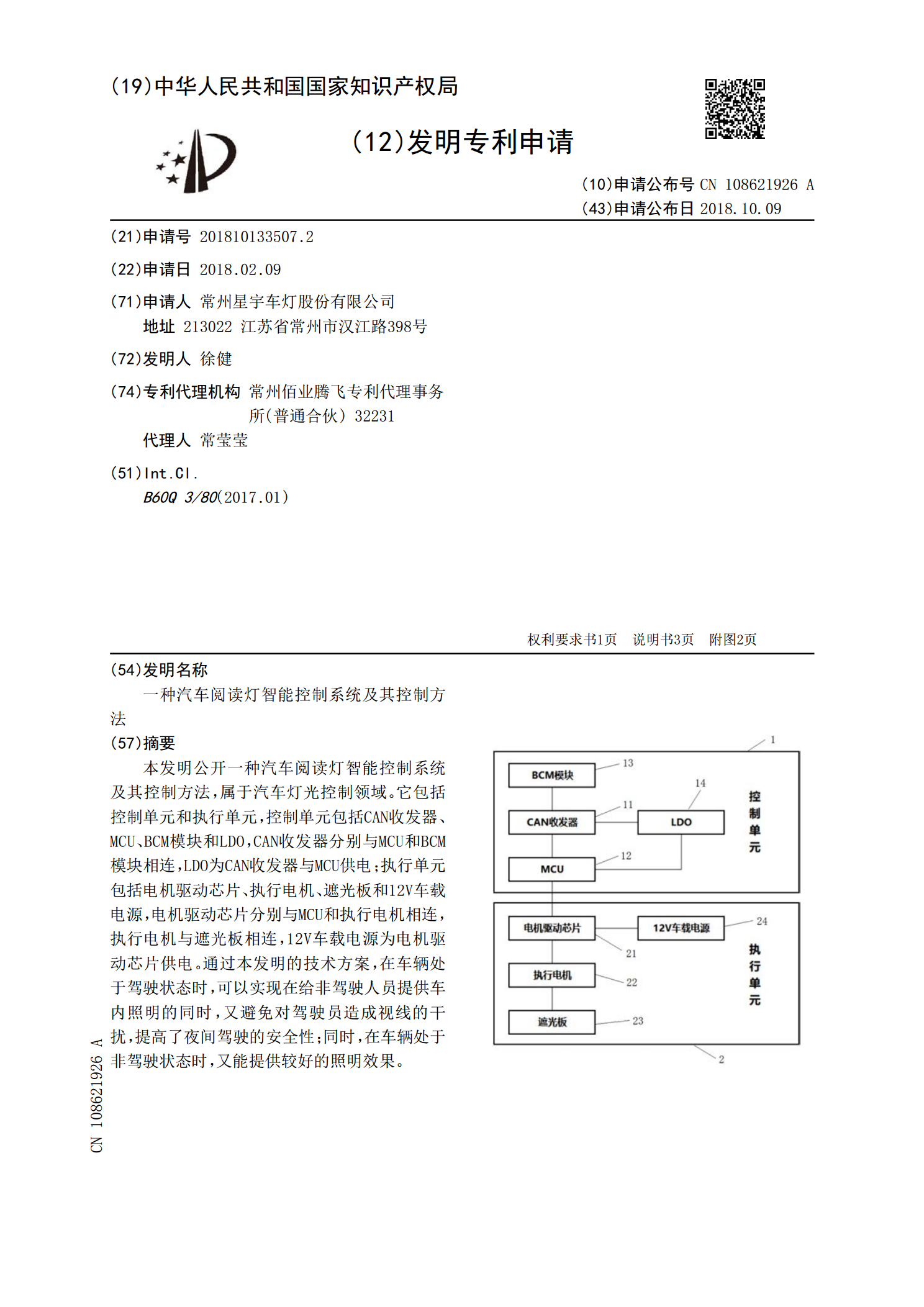
一种汽车阅读灯智能控制系统及其控制方法.pdf
本发明公开一种汽车阅读灯智能控制系统及其控制方法,属于汽车灯光控制领域。它包括控制单元和执行单元,控制单元包括CAN收发器、MCU、BCM模块和LDO,CAN收发器分别与MCU和BCM模块相连,LDO为CAN收发器与MCU供电;执行单元包括电机驱动芯片、执行电机、遮光板和12V车载电源,电机驱动芯片分别与MCU和执行电机相连,执行电机与遮光板相连,12V车载电源为电机驱动芯片供电。通过本发明的技术方案,在车辆处于驾驶状态时,可以实现在给非驾驶人员提供车内照明的同时,又避免对驾驶员造成视线的干扰,提高了夜间
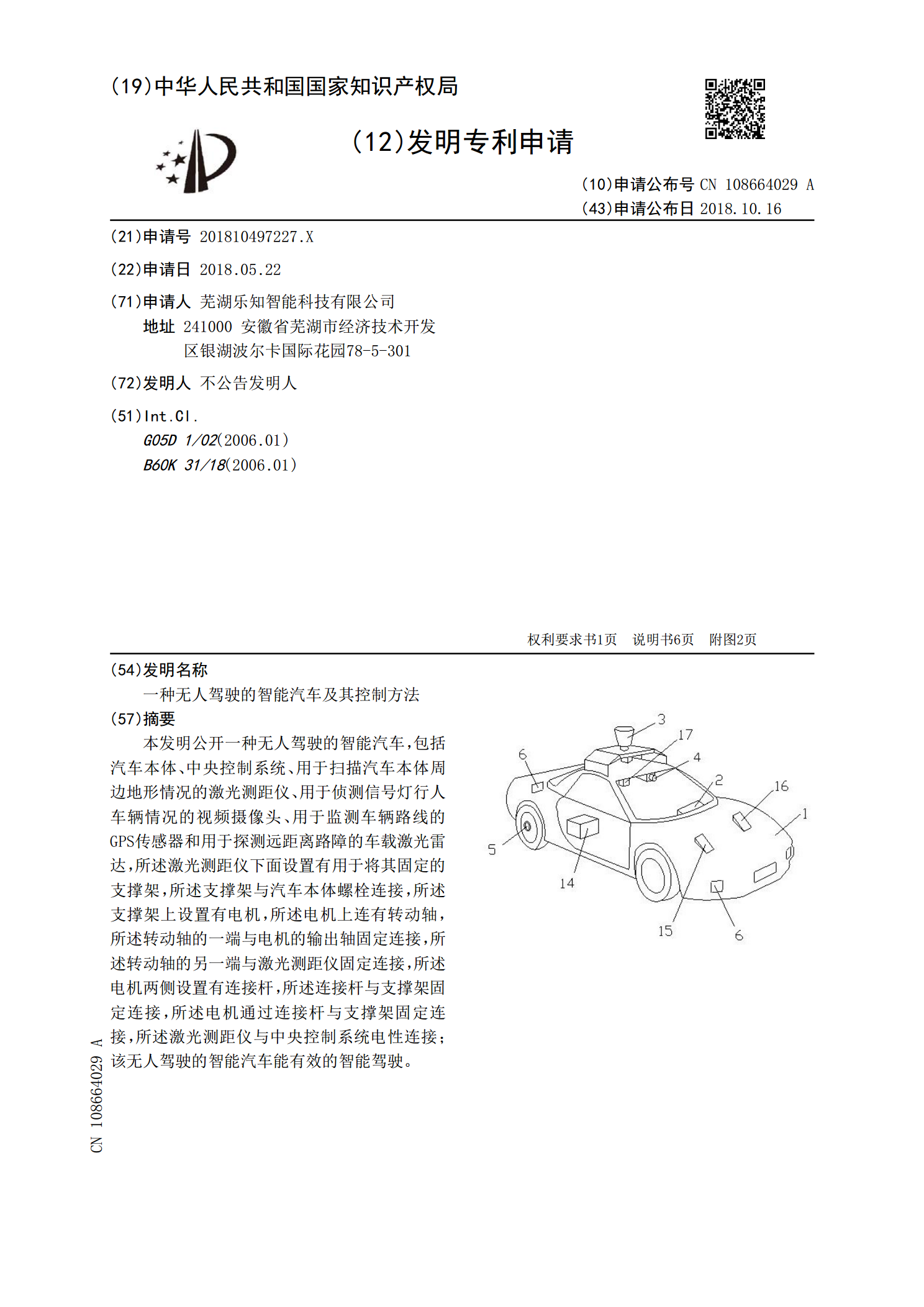
一种无人驾驶的智能汽车及其控制方法.pdf
本发明公开一种无人驾驶的智能汽车,包括汽车本体、中央控制系统、用于扫描汽车本体周边地形情况的激光测距仪、用于侦测信号灯行人车辆情况的视频摄像头、用于监测车辆路线的GPS传感器和用于探测远距离路障的车载激光雷达,所述激光测距仪下面设置有用于将其固定的支撑架,所述支撑架与汽车本体螺栓连接,所述支撑架上设置有电机,所述电机上连有转动轴,所述转动轴的一端与电机的输出轴固定连接,所述转动轴的另一端与激光测距仪固定连接,所述电机两侧设置有连接杆,所述连接杆与支撑架固定连接,所述电机通过连接杆与支撑架固定连接,所述激光