
一种无约束悬挂式主动重力补偿系统设计方法.pdf

是雁****找我


1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无约束悬挂式主动重力补偿系统设计方法.pdf
一种无约束悬挂式主动重力补偿系统设计方法,该系统由无约束连接、竖直恒张力悬挂、水平随动及控制模块组成。无约束连接模块包括连接套、外装框、施力件和低摩擦轴承,使航天器可绕质心做近似无约束转动;竖直恒张力悬挂模块包括力矩电机、齿轮齿条、悬挂吊丝和张力传感器,使航天器运动中受到的吊丝拉力等于重力;水平随动模块包括伺服电机、导轨、同步带和倾角传感器,使悬挂模块跟随航天器水平运动以保证吊丝处于竖直状态;控制模块包括采集卡、驱动器和运动控制卡。本发明可补偿地面试验环境中航天器的重力,进而用于再现其在空间微重力环境下的
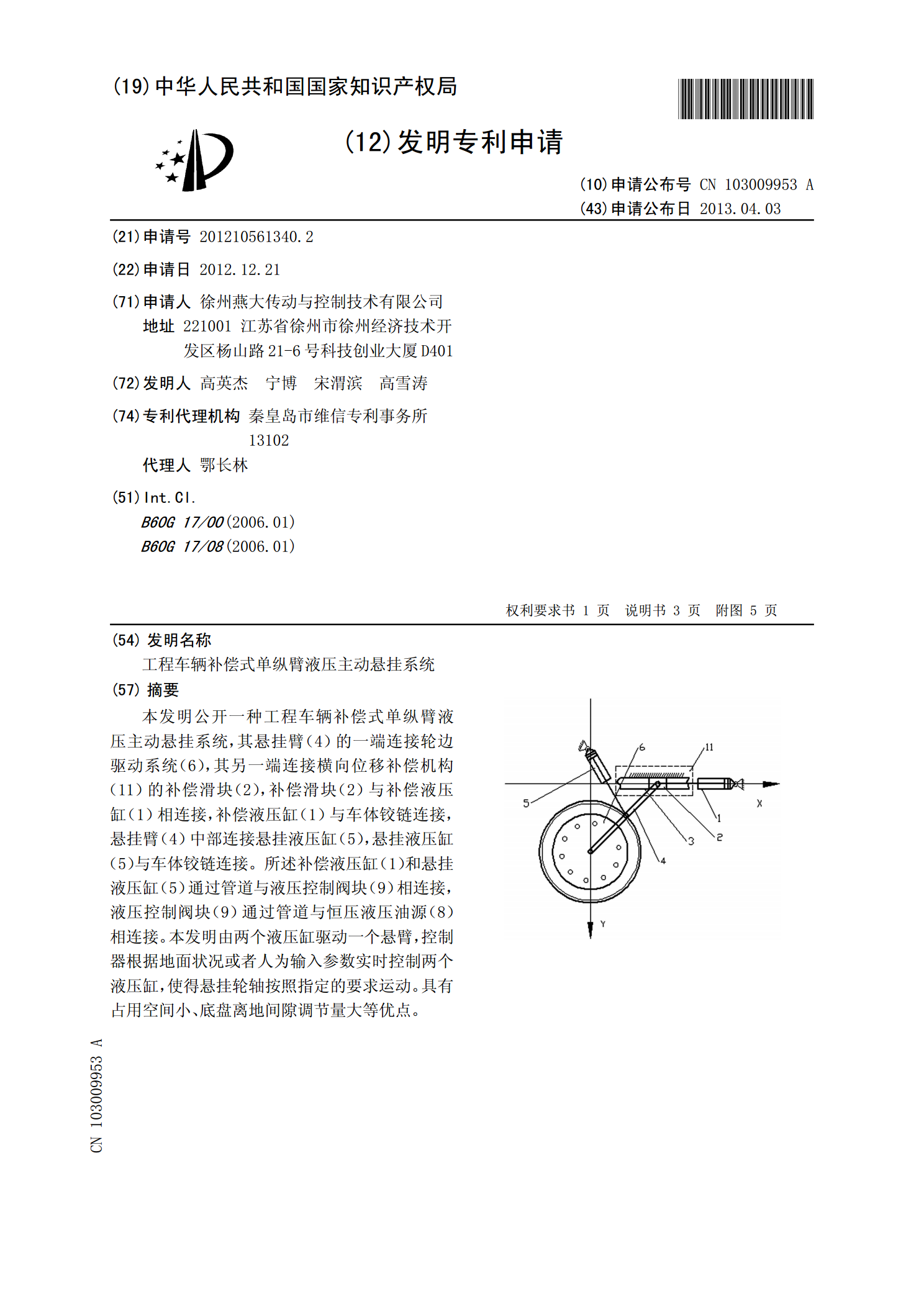
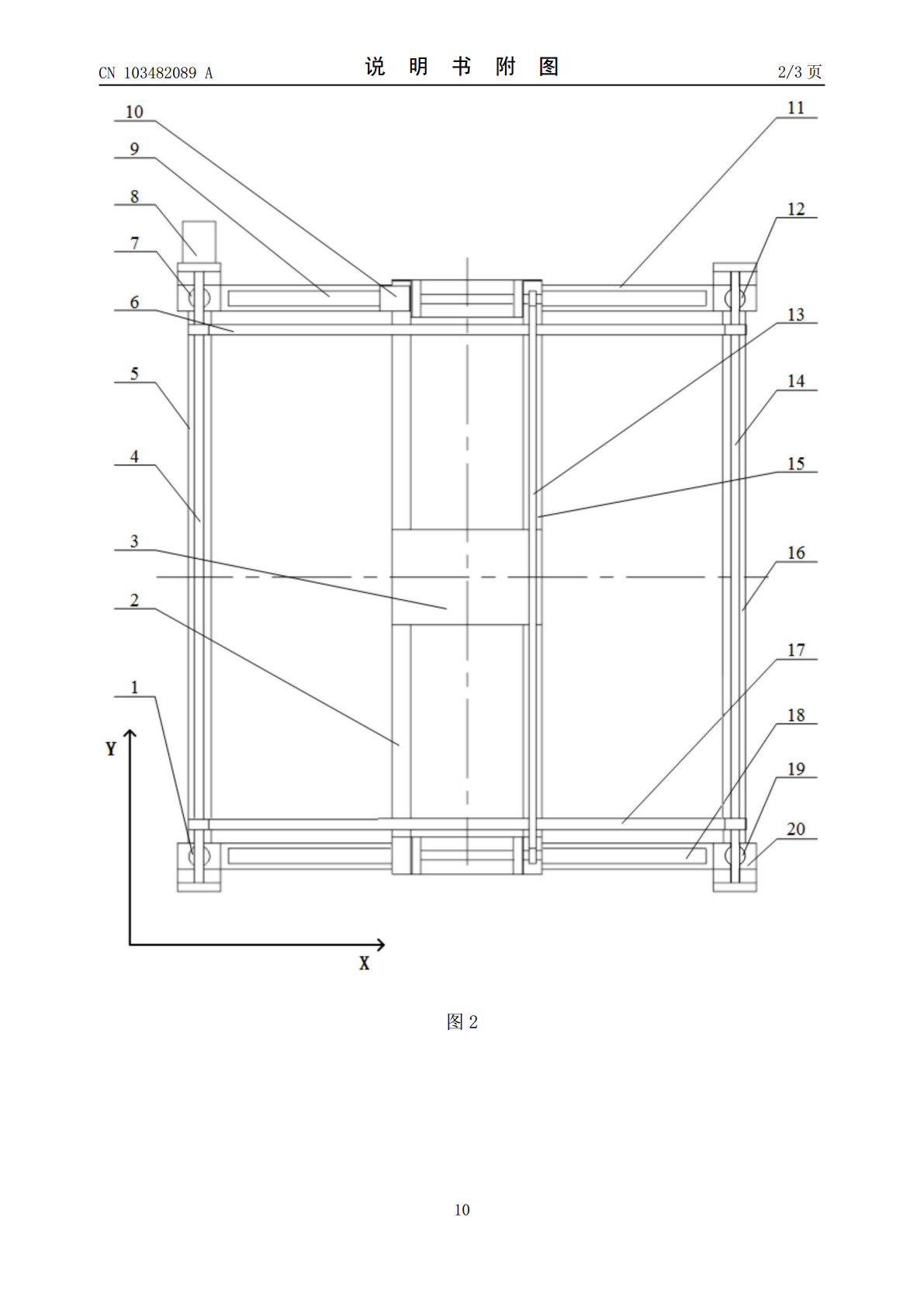
工程车辆补偿式单纵臂液压主动悬挂系统.pdf
本发明公开一种工程车辆补偿式单纵臂液压主动悬挂系统,其悬挂臂(4)的一端连接轮边驱动系统(6),其另一端连接横向位移补偿机构(11)的补偿滑块(2),补偿滑块(2)与补偿液压缸(1)相连接,补偿液压缸(1)与车体铰链连接,悬挂臂(4)中部连接悬挂液压缸(5),悬挂液压缸(5)与车体铰链连接。所述补偿液压缸(1)和悬挂液压缸(5)通过管道与液压控制阀块(9)相连接,液压控制阀块(9)通过管道与恒压液压油源(8)相连接。本发明由两个液压缸驱动一个悬臂,控制器根据地面状况或者人为输入参数实时控制两个液压缸,使得
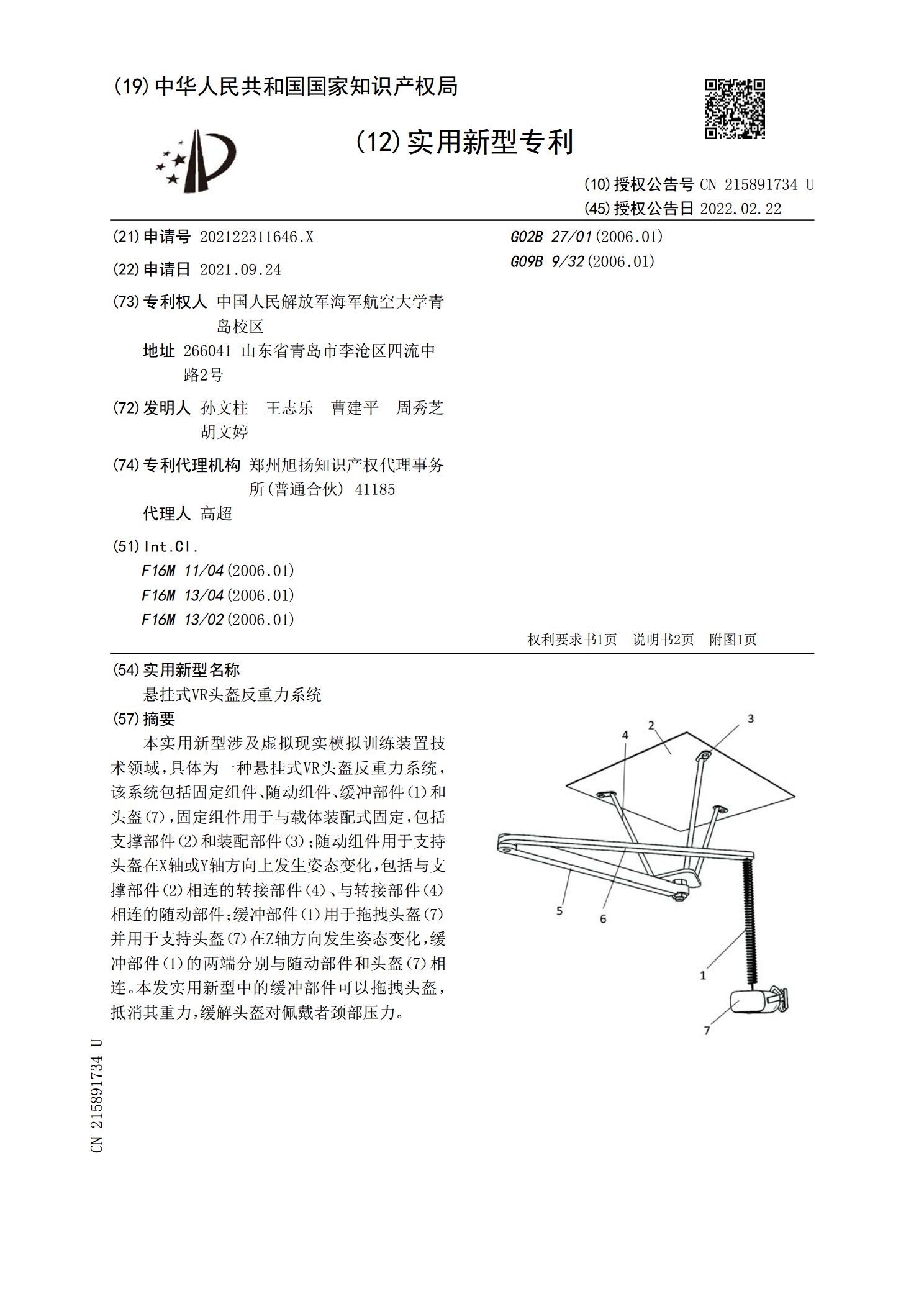
悬挂式VR头盔反重力系统.pdf
本实用新型涉及虚拟现实模拟训练装置技术领域,具体为一种悬挂式VR头盔反重力系统,该系统包括固定组件、随动组件、缓冲部件(1)和头盔(7),固定组件用于与载体装配式固定,包括支撑部件(2)和装配部件(3);随动组件用于支持头盔在X轴或Y轴方向上发生姿态变化,包括与支撑部件(2)相连的转接部件(4)、与转接部件(4)相连的随动部件;缓冲部件(1)用于拖拽头盔(7)并用于支持头盔(7)在Z轴方向发生姿态变化,缓冲部件(1)的两端分别与随动部件和头盔(7)相连。本发实用新型中的缓冲部件可以拖拽头盔,抵消其重力,缓

主动式独立悬挂.pdf
主动式独立悬挂,属于独立悬挂技术领域。可以克服现有独立悬挂容易发生侧倾、点头、后仰、弹跳、摇摆的不良减震现象的不足;克服现有独立悬挂容易发生轮胎侧向磨损的现象,使操控变得困难的不足。其结构包括:弹簧、伸缩杆、弹簧盘座、升降铅垂、升降电机、减速齿轮、蜗杆转轴、升降蜗轮、蜗轮轴承、蜗杆轴承、轴承支架、电机支架、升降蜗杆、蜗杆套筒、半轴套筒。可以替代现有独立悬挂,使乘坐和驾驶变得更加舒适、稳定。
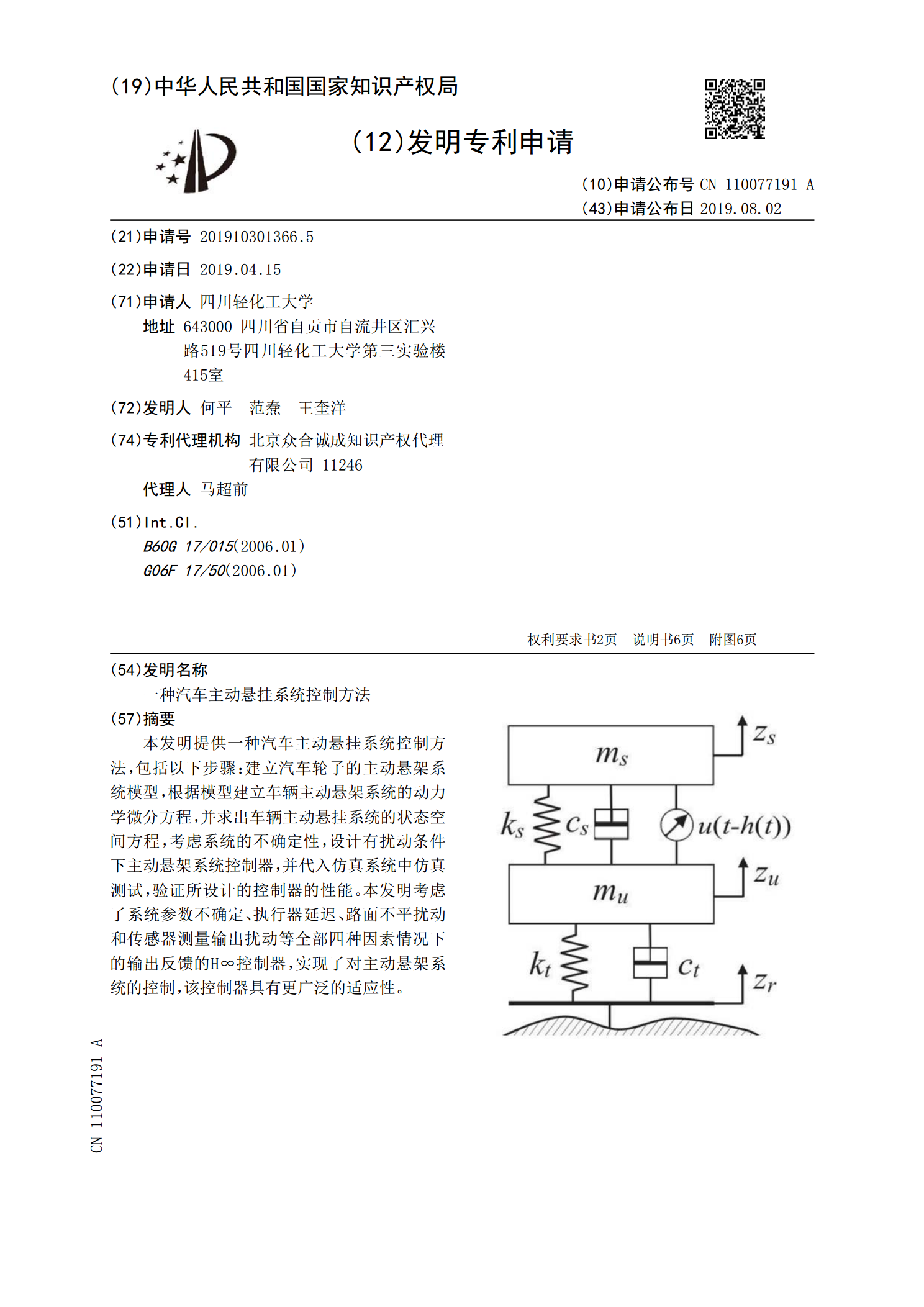
一种汽车主动悬挂系统控制方法.pdf
本发明提供一种汽车主动悬挂系统控制方法,包括以下步骤:建立汽车轮子的主动悬架系统模型,根据模型建立车辆主动悬架系统的动力学微分方程,并求出车辆主动悬挂系统的状态空间方程,考虑系统的不确定性,设计有扰动条件下主动悬架系统控制器,并代入仿真系统中仿真测试,验证所设计的控制器的性能。本发明考虑了系统参数不确定、执行器延迟、路面不平扰动和传感器测量输出扰动等全部四种因素情况下的输出反馈的H∞控制器,实现了对主动悬架系统的控制,该控制器具有更广泛的适应性。