
车辆用转向装置.pdf

雨巷****可歆


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆用转向装置.pdf
一种车辆用转向装置,其具备:转向机构(C),其具有转向部件(2)、转向角检测单元(12)以及检测以所述转向部件的中立位置为基准的转向方向的方向检测单元(40);转舵机构(A),其具有具备转舵电机(M)的转舵致动器(4)以及转舵轮(3),并未与所述转向机构机械地连结;以及控制装置(19),其控制所述转舵电机,当所述转向角检测单元发生故障时,该控制装置(19)基于来自所述方向检测单元的检测信号,决定控制所述转舵电机的转舵电机指令值来控制转舵电机。

车辆用转向装置.pdf
本发明提供一种车辆用转向装置,能够利用螺栓(29),将设于齿条罩壳(16)的安装托架(26)固定于车体的横向构件(25)。上述螺栓(29)插通于上述安装托架(26)的作为第一螺栓插通孔的长孔(27),而固定于上述横向构件(25)。在转向轮与路缘石等强烈地碰撞而对上述齿条罩壳(16)加载了反输入时,上述螺栓(29)在上述长孔(27)中沿左右方向(X1)移动。上述安装托架(26)及上述齿条罩壳(16)相对于上述横向构件(25)沿左右方向(X1)移动。
车辆用转向装置.pdf
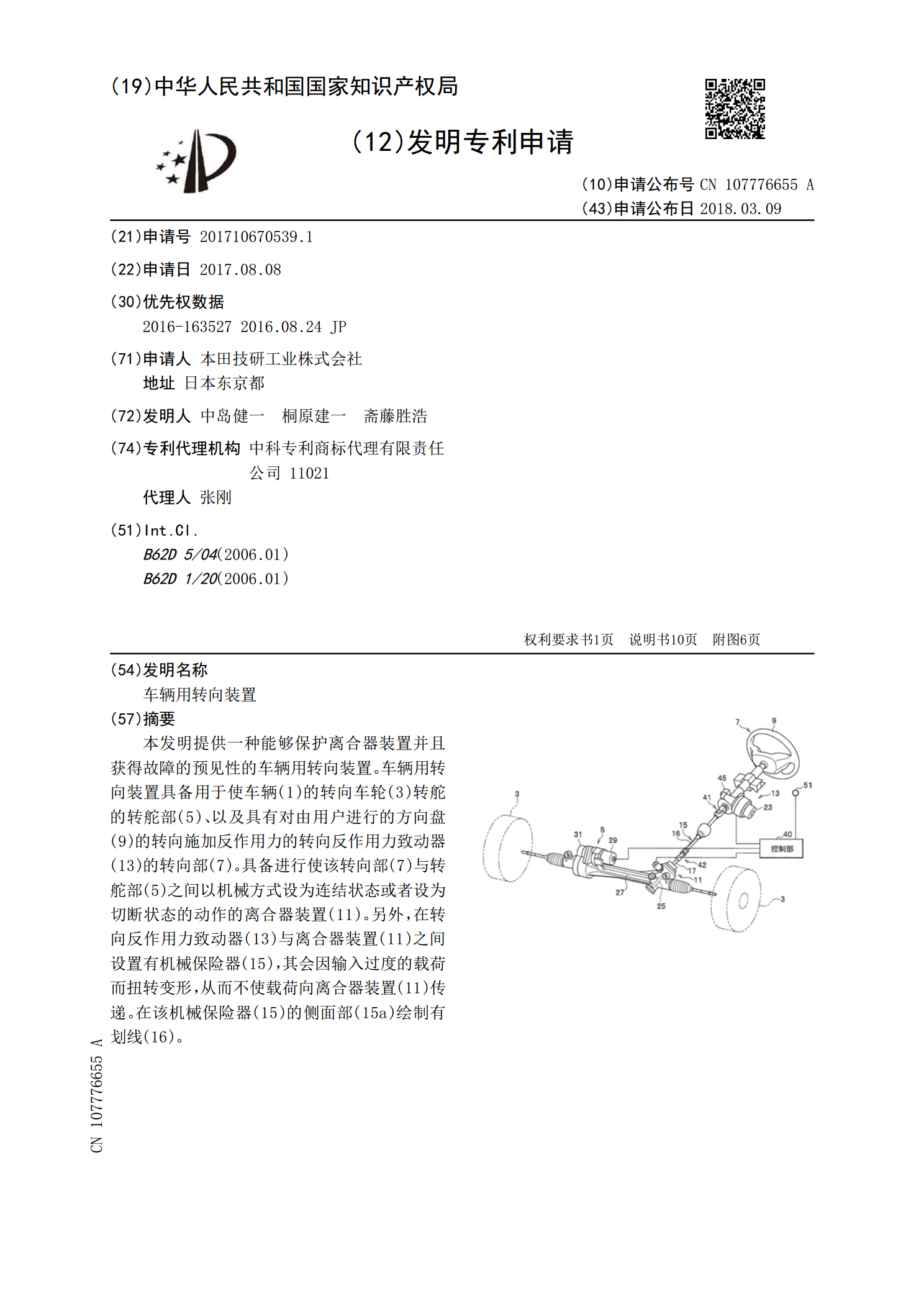
本发明提供一种能够保护离合器装置并且获得故障的预见性的车辆用转向装置。车辆用转向装置具备用于使车辆(1)的转向车轮(3)转舵的转舵部(5)、以及具有对由用户进行的方向盘(9)的转向施加反作用力的转向反作用力致动器(13)的转向部(7)。具备进行使该转向部(7)与转舵部(5)之间以机械方式设为连结状态或者设为切断状态的动作的离合器装置(11)。另外,在转向反作用力致动器(13)与离合器装置(11)之间设置有机械保险器(15),其会因输入过度的载荷而扭转变形,从而不使载荷向离合器装置(11)传递。在该机械保险

车辆用转向装置.pdf
本发明提供一种车辆用转向装置,其具有:对施加在手动转向机构(10)上的转向转矩进行检测的转向转矩检测机构(12);根据检测出的转向转矩来决定第一电动转矩值的第一电动转矩决定机构;根据由对车辆(100)的行为进行检测的车辆行为检测机构(15)检测出的检测值来决定第二电动转矩值的第二电动转矩决定机构;用于对转向车轮(6)施加总电动转矩的电动机(9);根据在第一电动转矩值上加上第二电动转矩值得到的总电动转矩值来控制向电动机流过的电流的电流控制机构,其中,第二电动转矩决定机构将比上限值大的第二电动转矩值再设定为上

车辆用转向装置.pdf
车辆用转向装置(101)具备:转舵装置(3),其具有电特性相互共同地设定的转舵用的第一电动机(332)及第二电动机(342),且根据方向盘(1)的操作而对转向车轮(30a、30b)进行转舵;第一电流传感器(332A),其检测流过第一电动机(332)的第一电流值;第二电流传感器(342A),其检测流过第二电动机(342)的第二电流值;以及异常诊断部(79a、79b、79c)。异常诊断部(79a、79b、79c)在由第一及第二电流传感器(332A、342A)分别检测出的第一及第二电流值的偏差超过规定的阈值的情