
一种水果采摘机器人末端执行器.pdf

17****91


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水果采摘机器人末端执行器.pdf
一种水果采摘机器人的末端执行器随着科技的不断进步,机器人技术正在越来越广泛地应用于各种领域。其中,水果采摘领域也不例外。水果采摘机器人的末端执行器是实现采摘水果的关键部分,它能够通过精确的操作,快速、高效地完成水果采摘任务。一、末端执行器的设计水果采摘机器人的末端执行器一般采用机械手或机器人手臂的设计。它通常由多个关节组成,具有高度的灵活性和操作性。末端执行器可以通过感应器来感知水果的位置和形状,并通过复杂的算法来确定最佳的采摘路径。二、末端执行器的操作流程1、感应水果:末端执行器使用感应器来探测水果的位

一种水果采摘机器人末端执行器.pdf
一种水果采摘机器人末端执行器一种水果采摘机器人的末端执行器随着科技的不断进步,机器人技术正在越来越广泛地应用于各种领域。其中,水果采摘领域也不例外。水果采摘机器人的末端执行器是实现采摘水果的关键部分,它能够通过精确的操作,快速、高效地完成水果采摘任务。一、末端执行器的设计水果采摘机器人的末端执行器一般采用机械手或机器人手臂的设计。它通常由多个关节组成,具有高度的灵活性和操作性。末端执行器可以通过感应器来感知水果的位置和形状,并通过复杂的算法来确定最佳的采摘路径。二、末端执行器的操作流程1、感应水果:末端执

一种搭载末端执行器的水果采摘机器人.pdf
本发明公开了一种搭载末端执行器的水果采摘机器人,包括:车体;气泵,所述气泵安装在车体顶端的右侧;显示器,所述显示器安装在车体的顶端;水果收集箱,所述水果收集箱设置在车体的顶端;工控机箱,所述工控机箱安装在车体的顶端;机械结构包括车体、采摘机械臂、末端执行器等,选用轮式车体作为移动机构,采摘机械臂为自主设计的灵巧机械臂,末端执行器则选用气动机械手爪,通过剪断果梗、夹持果梗的方式完成采摘。整机采用PLC控制,运行稳定,抗干扰能力强。气爪采用气动驱动,响应速度快,体积小、结构简单,维修和使用方便,可通过夹持果梗
一种柑橘采摘机器人的末端执行器.pdf
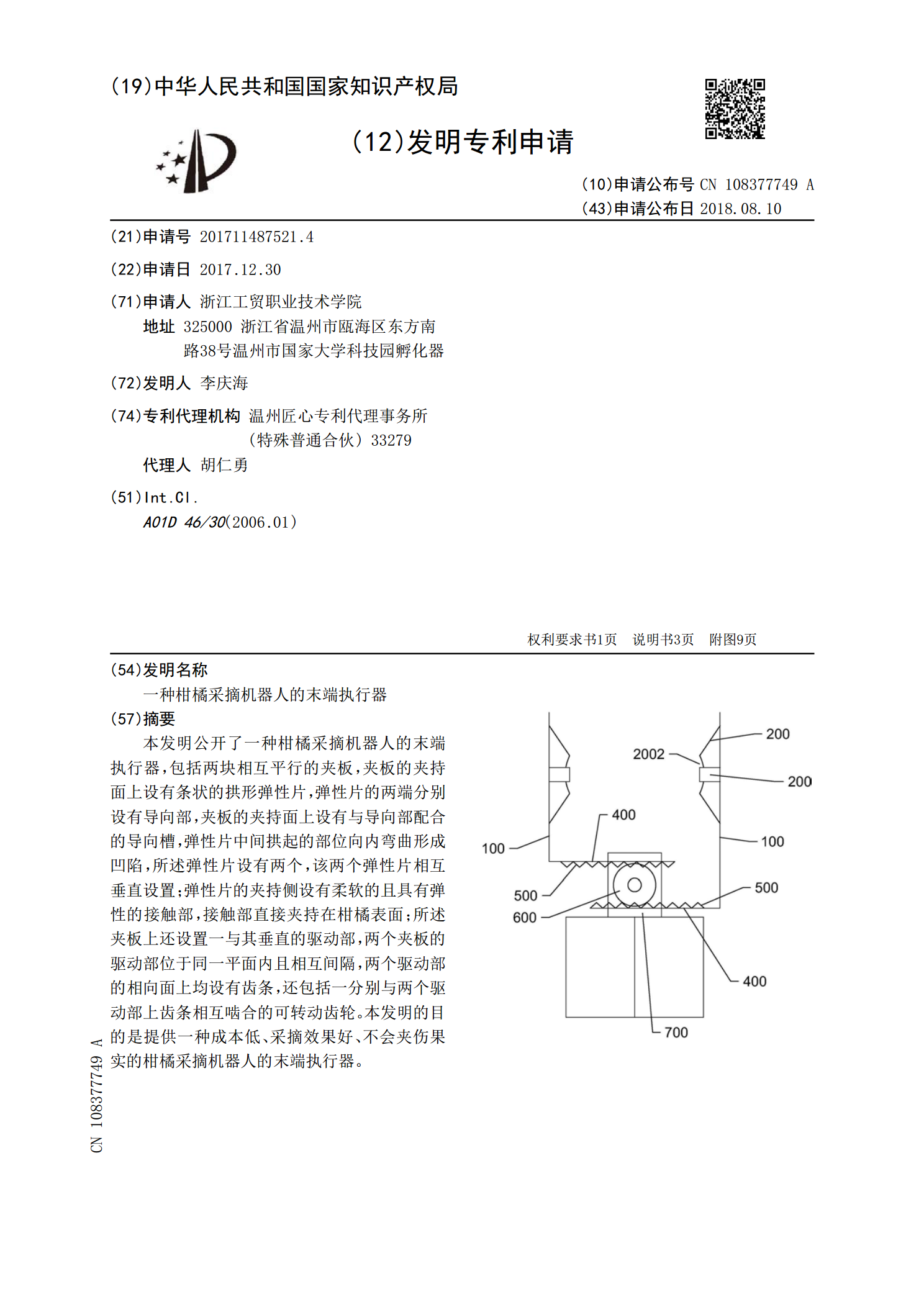
本发明公开了一种柑橘采摘机器人的末端执行器,包括两块相互平行的夹板,夹板的夹持面上设有条状的拱形弹性片,弹性片的两端分别设有导向部,夹板的夹持面上设有与导向部配合的导向槽,弹性片中间拱起的部位向内弯曲形成凹陷,所述弹性片设有两个,该两个弹性片相互垂直设置;弹性片的夹持侧设有柔软的且具有弹性的接触部,接触部直接夹持在柑橘表面;所述夹板上还设置一与其垂直的驱动部,两个夹板的驱动部位于同一平面内且相互间隔,两个驱动部的相向面上均设有齿条,还包括一分别与两个驱动部上齿条相互啮合的可转动齿轮。本发明的目的是提供一种
一种香梨采摘机器人末端执行器及采摘方法.pdf
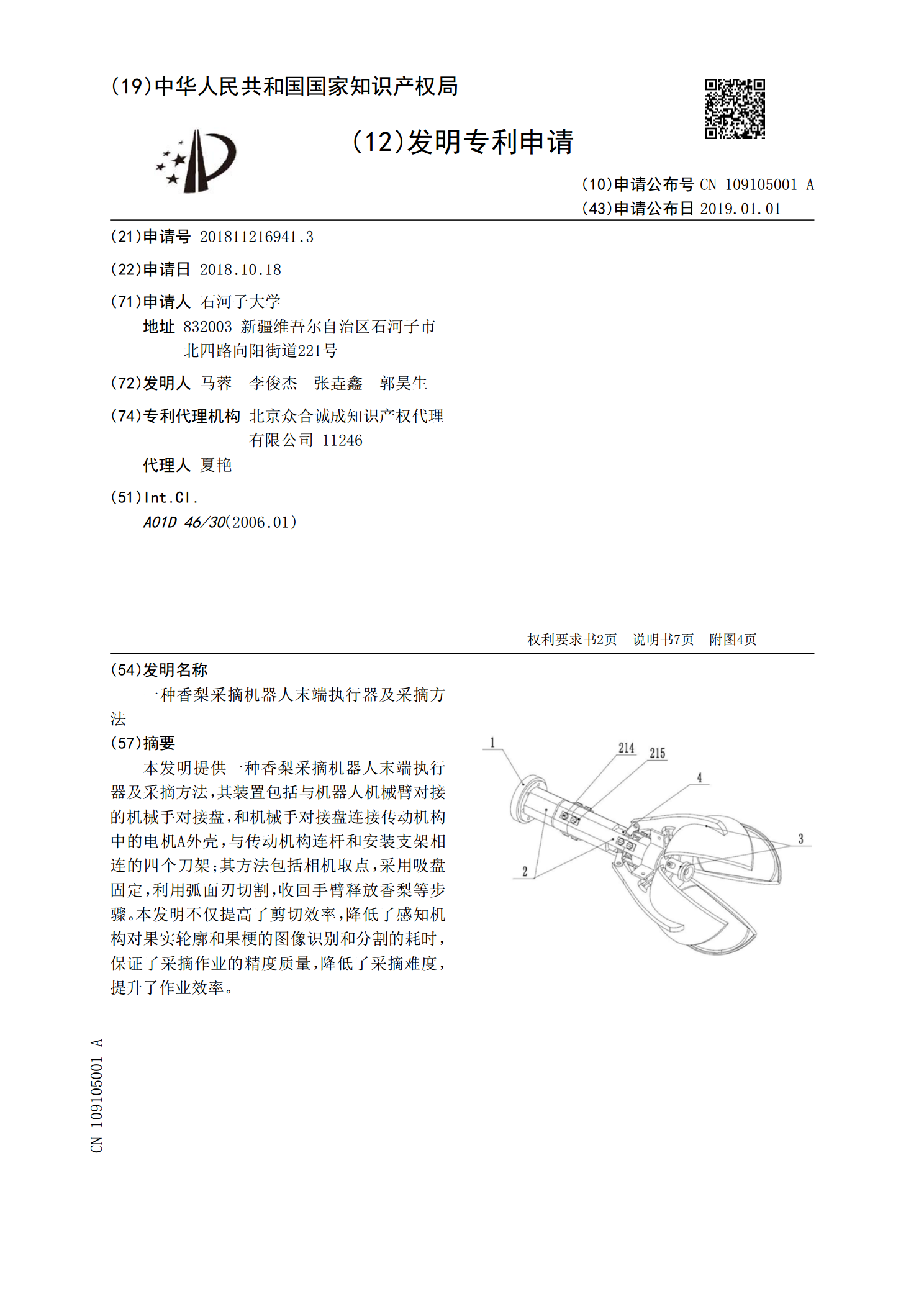
本发明提供一种香梨采摘机器人末端执行器及采摘方法,其装置包括与机器人机械臂对接的机械手对接盘,和机械手对接盘连接传动机构中的电机A外壳,与传动机构连杆和安装支架相连的四个刀架;其方法包括相机取点,采用吸盘固定,利用弧面刃切割,收回手臂释放香梨等步骤。本发明不仅提高了剪切效率,降低了感知机构对果实轮廓和果梗的图像识别和分割的耗时,保证了采摘作业的精度质量,降低了采摘难度,提升了作业效率。