
升降拍打托袋机构.pdf

贤惠****66

1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

升降拍打托袋机构.pdf
本发明涉及包装设备领域,尤其是涉及一种升降拍打托袋机构,包括一托袋板,所述托袋板安装在一升降装置的托架上;所述升降装置包括机架,机架下部设有主动链轮,主动链轮通过联轴器与安装在伺服电机上的减速器联接,机架上部设有从动链轮,主动链轮和从动链轮通过精密滚子链条联接;所述机架还设有一对垂直的导向柱,所述托架一侧通过导轮抱紧固定在所述导向柱上,可沿所述导向柱上下移动;所述托架边缘固定在所述精密滚子链条上。本发明有结构简单、动作灵活、稳定性高等优点,包装袋不易发生倾斜,提高了设备的工作效率。

一种夹袋升降机构.pdf
本发明提供了一种夹袋升降机构,包括固定架,电机,减速器,旋转轴,设置于旋转轴端部的偏心轮,上连杆,下连杆,以及安装于上连杆及下连杆间的提升架,偏心轮通过连杆与上连杆和/或下连杆连接,并通过偏心轮的转动带动提升架实现升降运动。通过偏心轮的转动,实现了带动与上连杆和/或下连杆连接的提升架的升降运动,同时,通过改变偏心距,实现了夹袋升降机构升降距离的灵活调整;最后,通过设置除尘罩有效地控制了物料在装填过程所产生的粉尘,减少了粉尘对操作人员所造成的危害。
自动拍打机构.pdf
本发明有关于一种自动拍打机构,包含有一支撑架、一驱动装置,以及一拍打装置,其中的支撑架用来支撑用户的重量,驱动装置具有一马达及一连接马达的凸轮,拍打装置具有一枢设于支撑架的杆件、一连接杆件的拍打件、一连接杆件且抵接凸轮的滚轮,以及一连接支撑架及杆件的弹性件,由此,当凸轮受到马达的驱动而开始转动时,凸轮会通过滚轮来将杆件推动至一预压位置,接着当凸轮继续转动时会解除对杆件的推力,此时的杆件会受到弹性件的拉力而偏摆至一拍击位置,如此在两个位置之间重复作动,即可有效达到舒缓背部肌肉或拍痰的效果。
高速托袋移动机构及移动方法.pdf
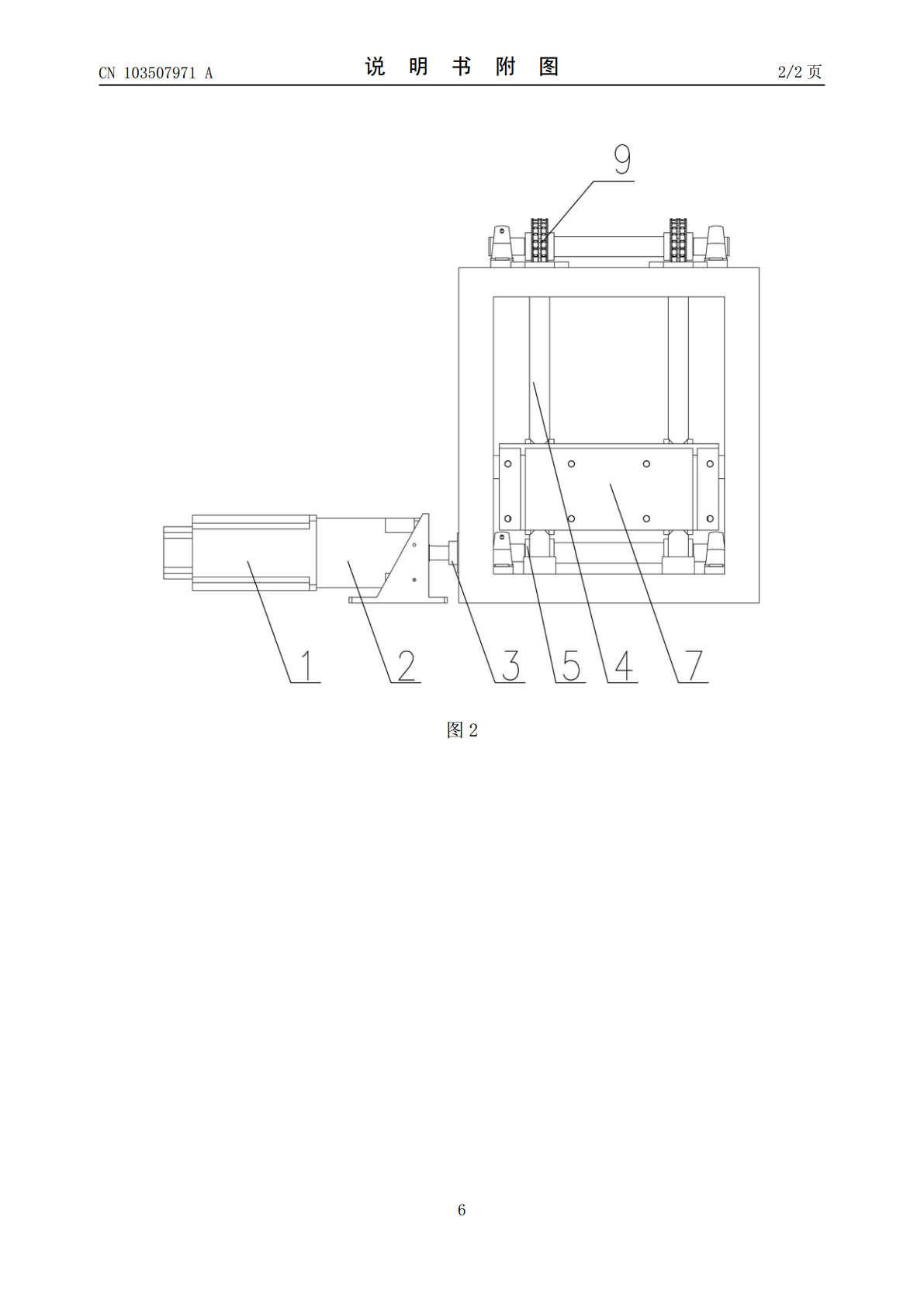
本发明涉及一种高速托袋移动机构及移动方法。传统的托袋移动机构在水平移送过程中通过两个动力源执行控制,该结构无法保证移送速度完全匹配,容易出现物料漏出和冒出粉尘现象。本发明组成包括:机架(1),机架上平面固定有齿轮齿条传动机构(5)中的齿条,齿轮齿条传动机构通过螺栓与伺服电机(2)固定,伺服电机通过电机安装板固定在所述机架的方管上,机架上方分别固定有移送滑板装置(4)的2根导轨,移送滑板装置具有双轴心直线导轨结构,移送滑板装置上方安装有升降气缸支架体(3),升降气缸支架体的上平面安装有抻袋装置(6),升降气

板料码垛自动拍打机构.pdf
本发明公开了一种板料码垛自动拍打机构,包括有运输带来移动板料,所述运输带的末端的左右两侧均连接有滚轴,所述滚轴固定安装在摆动架上,由所述摆动架的摆动来调节左右两个滚轴之间的距离,所述滚轴与运输带的高度一致,所述左滚轴与右滚轴中间的地面上设置有轨道,在所述轨道上设置有台车,所述轨道的上方设置有支杆,在所述支杆上设置有垂直朝下的挡板;通过对下落到台车上的板料进行拍打,以使得台车上的板料整齐有序。