
气动肌肉驱动的变转轴仿生关节.pdf

努力****星驰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

气动肌肉驱动的变转轴仿生关节.pdf
本发明属于仿生机构设计领域,涉及一种气动肌肉驱动的变转轴仿生关节。它解决了现有技术设计不够合理等技术问题。包括筒身,筒身上侧固设有上法兰,筒身一侧穿设有第一柔性连杆组件,另一侧穿设有第二柔性连杆组件,筒身下侧穿设有第三柔性连杆组件,筒身内上侧设有弹性件,筒身内设有具有内凹侧边弧形的曲线边缘转盘,曲线边缘转盘上固连有摆动杆,摆动杆下端位于筒身外且固连安装板,安装板上固连有下法兰。优点在于:设计合理,结构简单,机构调解灵活,通用性强,柔性连接组件使得仿生关节柔顺性好,抖动小,滑轮组件使得关节摆角范围大,负载能
拮抗式气动肌肉驱动的变转轴大转角仿生膝关节.pdf
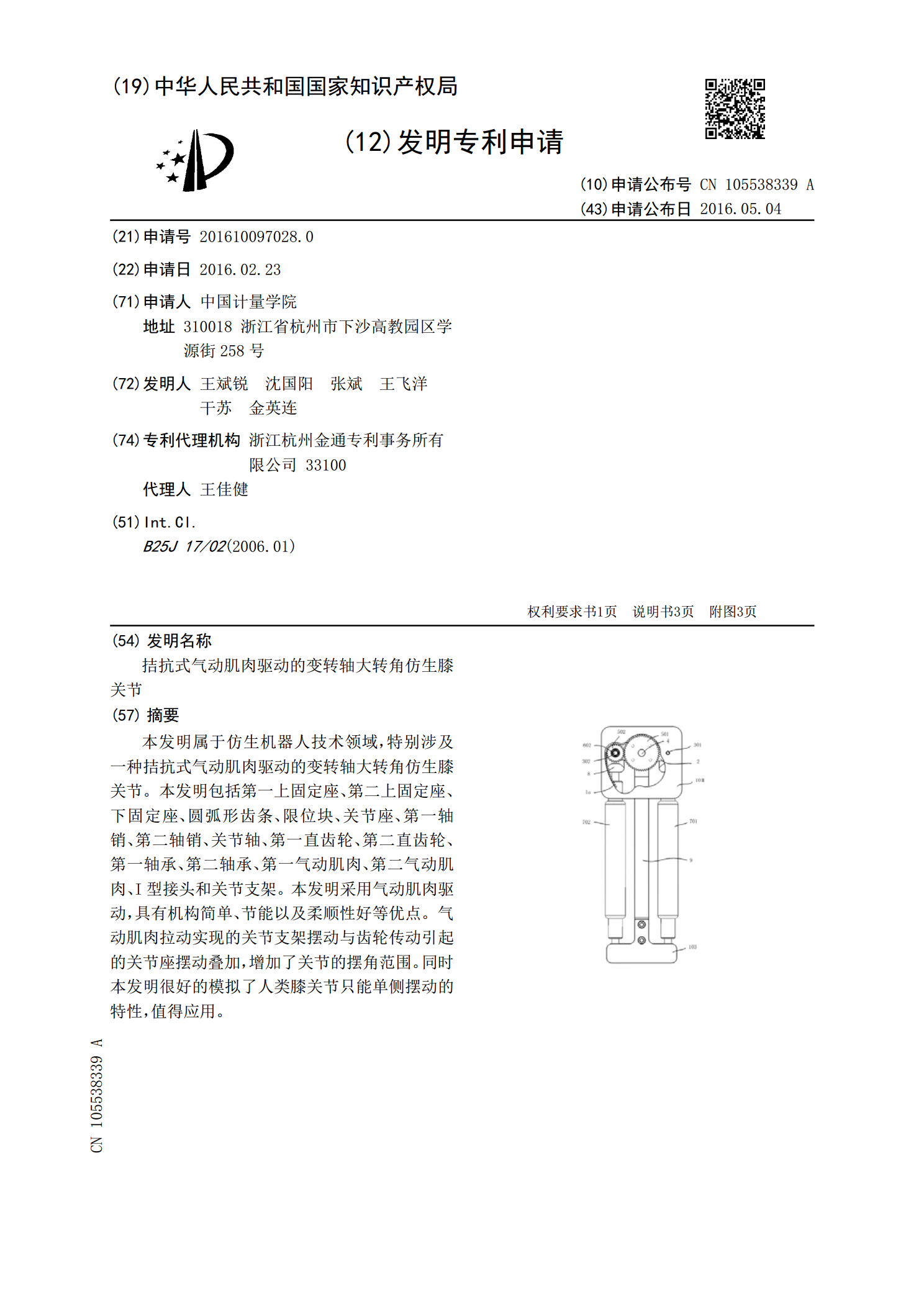
本发明属于仿生机器人技术领域,特别涉及一种拮抗式气动肌肉驱动的变转轴大转角仿生膝关节。本发明包括第一上固定座、第二上固定座、下固定座、圆弧形齿条、限位块、关节座、第一轴销、第二轴销、关节轴、第一直齿轮、第二直齿轮、第一轴承、第二轴承、第一气动肌肉、第二气动肌肉、I型接头和关节支架。本发明采用气动肌肉驱动,具有机构简单、节能以及柔顺性好等优点。气动肌肉拉动实现的关节支架摆动与齿轮传动引起的关节座摆动叠加,增加了关节的摆角范围。同时本发明很好的模拟了人类膝关节只能单侧摆动的特性,值得应用。
单气动人工肌肉混合驱动关节.pdf
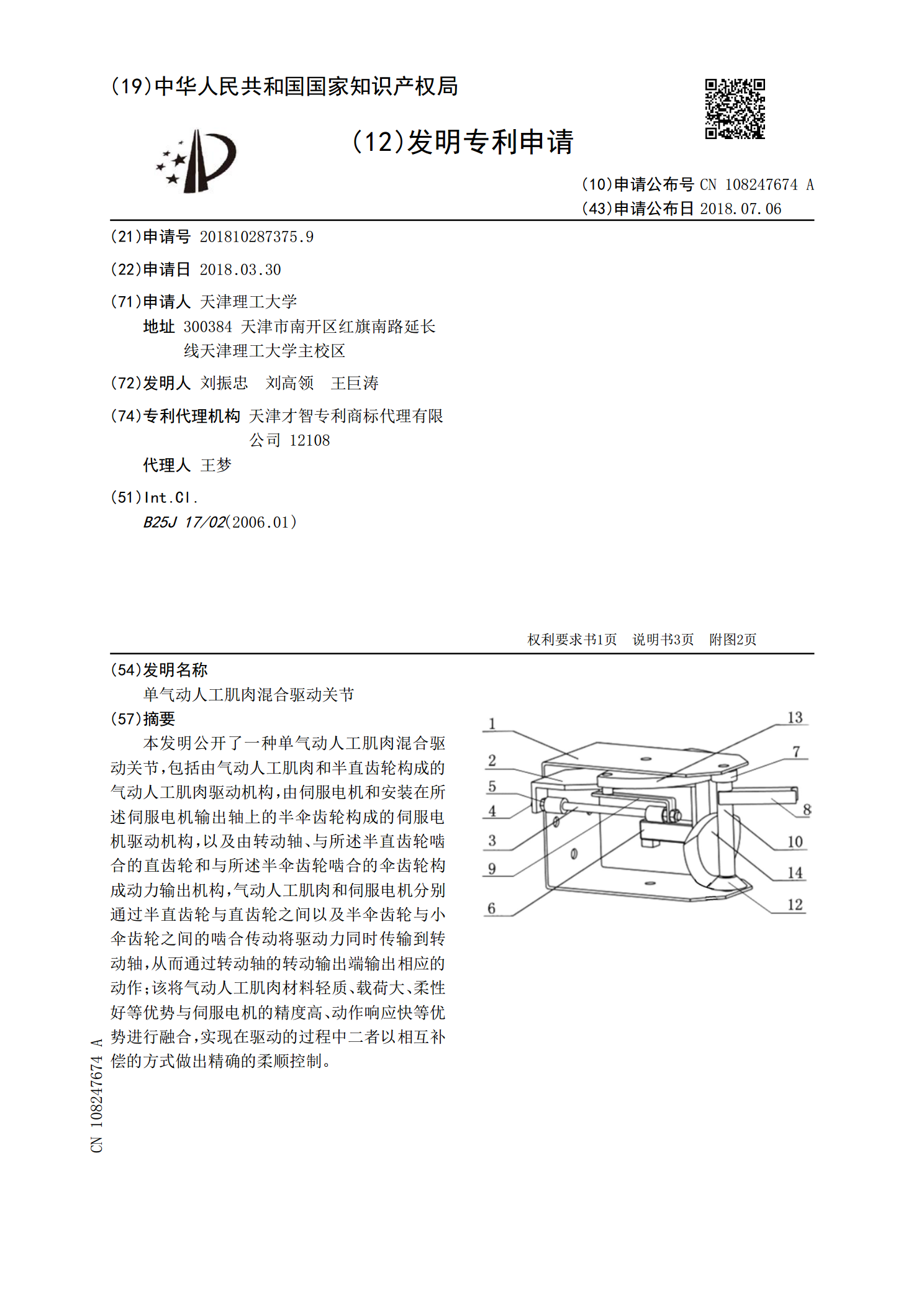
本发明公开了一种单气动人工肌肉混合驱动关节,包括由气动人工肌肉和半直齿轮构成的气动人工肌肉驱动机构,由伺服电机和安装在所述伺服电机输出轴上的半伞齿轮构成的伺服电机驱动机构,以及由转动轴、与所述半直齿轮啮合的直齿轮和与所述半伞齿轮啮合的伞齿轮构成动力输出机构,气动人工肌肉和伺服电机分别通过半直齿轮与直齿轮之间以及半伞齿轮与小伞齿轮之间的啮合传动将驱动力同时传输到转动轴,从而通过转动轴的转动输出端输出相应的动作;该将气动人工肌肉材料轻质、载荷大、柔性好等优势与伺服电机的精度高、动作响应快等优势进行融合,实现在
气动人工肌肉与伺服电机混合驱动关节.pdf
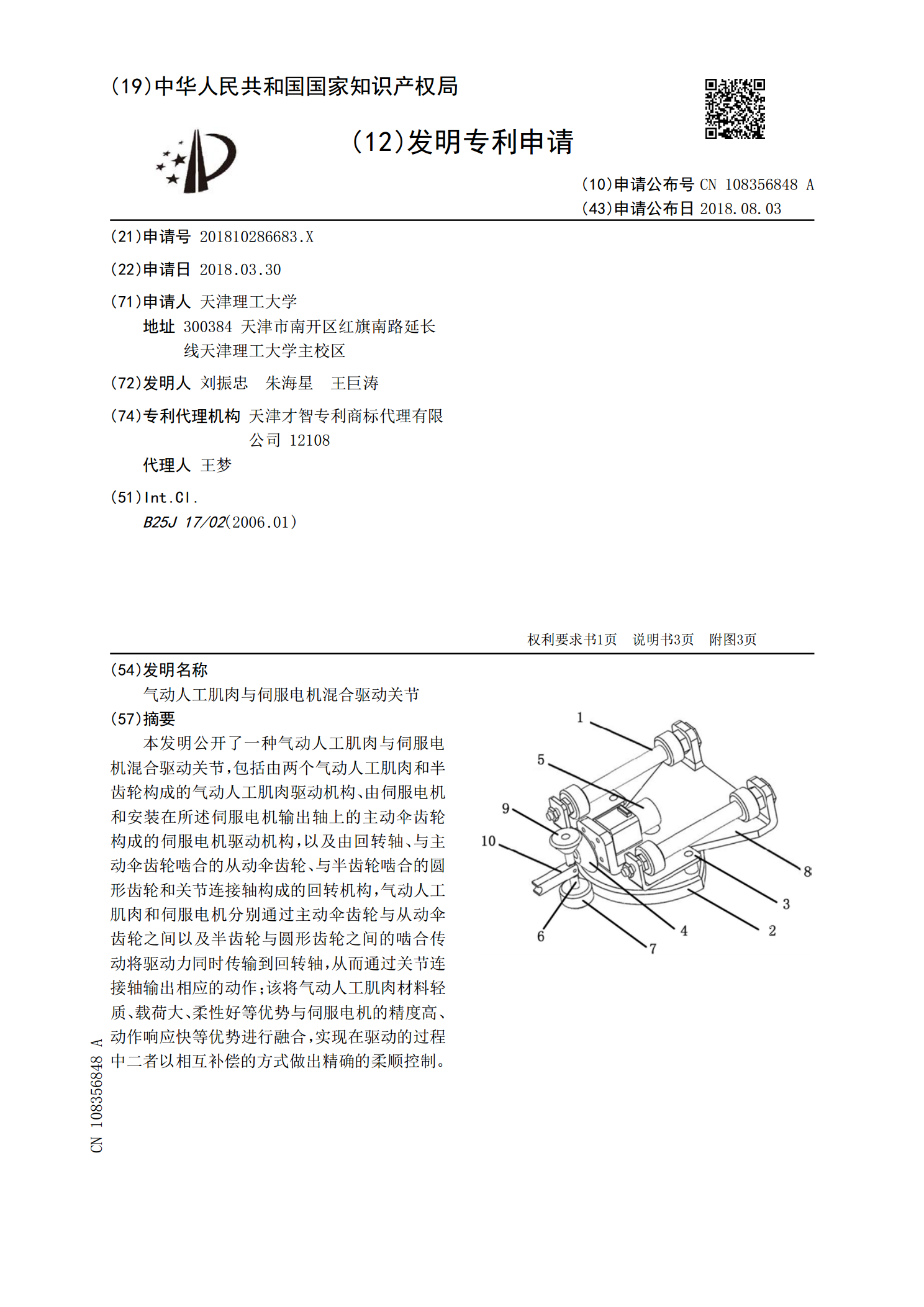
本发明公开了一种气动人工肌肉与伺服电机混合驱动关节,包括由两个气动人工肌肉和半齿轮构成的气动人工肌肉驱动机构、由伺服电机和安装在所述伺服电机输出轴上的主动伞齿轮构成的伺服电机驱动机构,以及由回转轴、与主动伞齿轮啮合的从动伞齿轮、与半齿轮啮合的圆形齿轮和关节连接轴构成的回转机构,气动人工肌肉和伺服电机分别通过主动伞齿轮与从动伞齿轮之间以及半齿轮与圆形齿轮之间的啮合传动将驱动力同时传输到回转轴,从而通过关节连接轴输出相应的动作;该将气动人工肌肉材料轻质、载荷大、柔性好等优势与伺服电机的精度高、动作响应快等优势

仿生对抗变刚度驱动关节的研究与设计.docx
仿生对抗变刚度驱动关节的研究与设计标题:仿生对抗变刚度驱动关节的研究与设计摘要:随着机器人技术的不断发展,仿生机器人的研究也逐渐受到关注。本论文旨在探讨仿生对抗变刚度驱动关节的研究与设计。首先介绍了变刚度驱动关节的概念及其在机器人领域中的应用,然后介绍了仿生的概念以及仿生机器人与生物体之间的联系。接着,本文详细介绍了对抗变刚度驱动关节的原理与方法,并分析了该设计的优缺点。最后,本文对仿生对抗变刚度驱动关节的未来发展进行了展望。关键词:仿生机器人、对抗变刚度驱动关节、生物体、机器人技术引言:在工业生产、医疗