
单气动人工肌肉混合驱动关节.pdf

书生****萌哒

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
单气动人工肌肉混合驱动关节.pdf
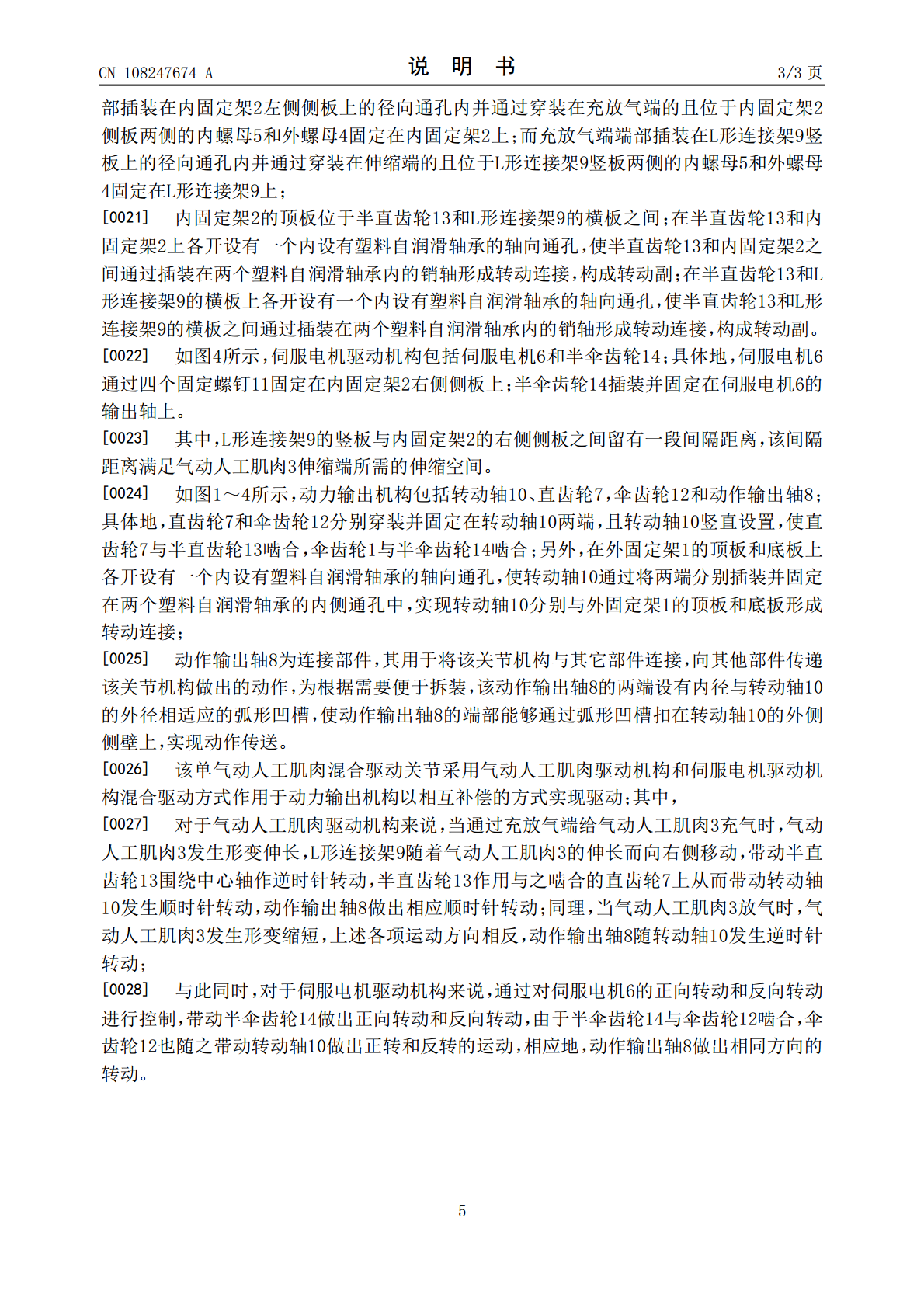
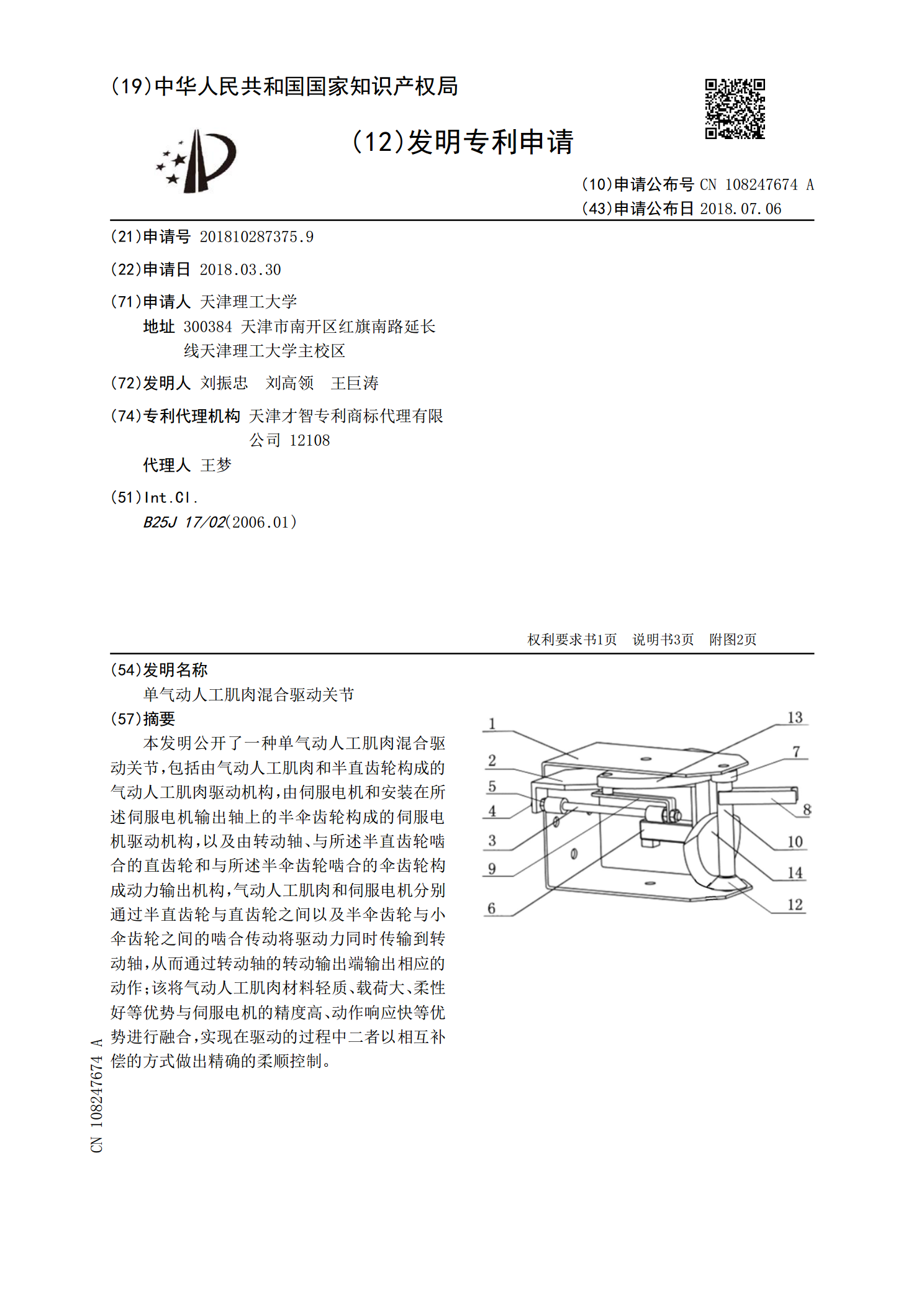
本发明公开了一种单气动人工肌肉混合驱动关节,包括由气动人工肌肉和半直齿轮构成的气动人工肌肉驱动机构,由伺服电机和安装在所述伺服电机输出轴上的半伞齿轮构成的伺服电机驱动机构,以及由转动轴、与所述半直齿轮啮合的直齿轮和与所述半伞齿轮啮合的伞齿轮构成动力输出机构,气动人工肌肉和伺服电机分别通过半直齿轮与直齿轮之间以及半伞齿轮与小伞齿轮之间的啮合传动将驱动力同时传输到转动轴,从而通过转动轴的转动输出端输出相应的动作;该将气动人工肌肉材料轻质、载荷大、柔性好等优势与伺服电机的精度高、动作响应快等优势进行融合,实现在
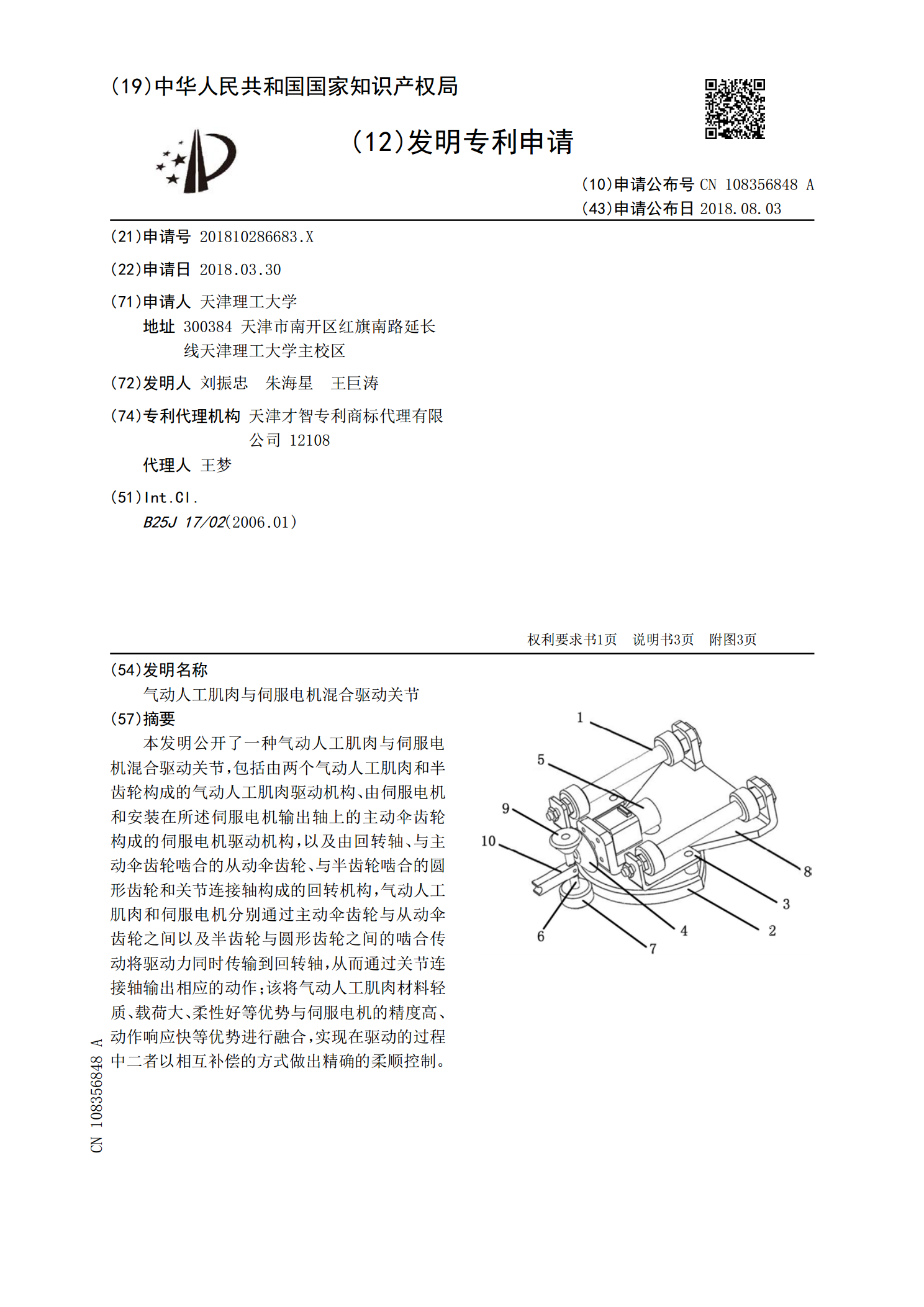
气动人工肌肉与伺服电机混合驱动关节.pdf
本发明公开了一种气动人工肌肉与伺服电机混合驱动关节,包括由两个气动人工肌肉和半齿轮构成的气动人工肌肉驱动机构、由伺服电机和安装在所述伺服电机输出轴上的主动伞齿轮构成的伺服电机驱动机构,以及由回转轴、与主动伞齿轮啮合的从动伞齿轮、与半齿轮啮合的圆形齿轮和关节连接轴构成的回转机构,气动人工肌肉和伺服电机分别通过主动伞齿轮与从动伞齿轮之间以及半齿轮与圆形齿轮之间的啮合传动将驱动力同时传输到回转轴,从而通过关节连接轴输出相应的动作;该将气动人工肌肉材料轻质、载荷大、柔性好等优势与伺服电机的精度高、动作响应快等优势
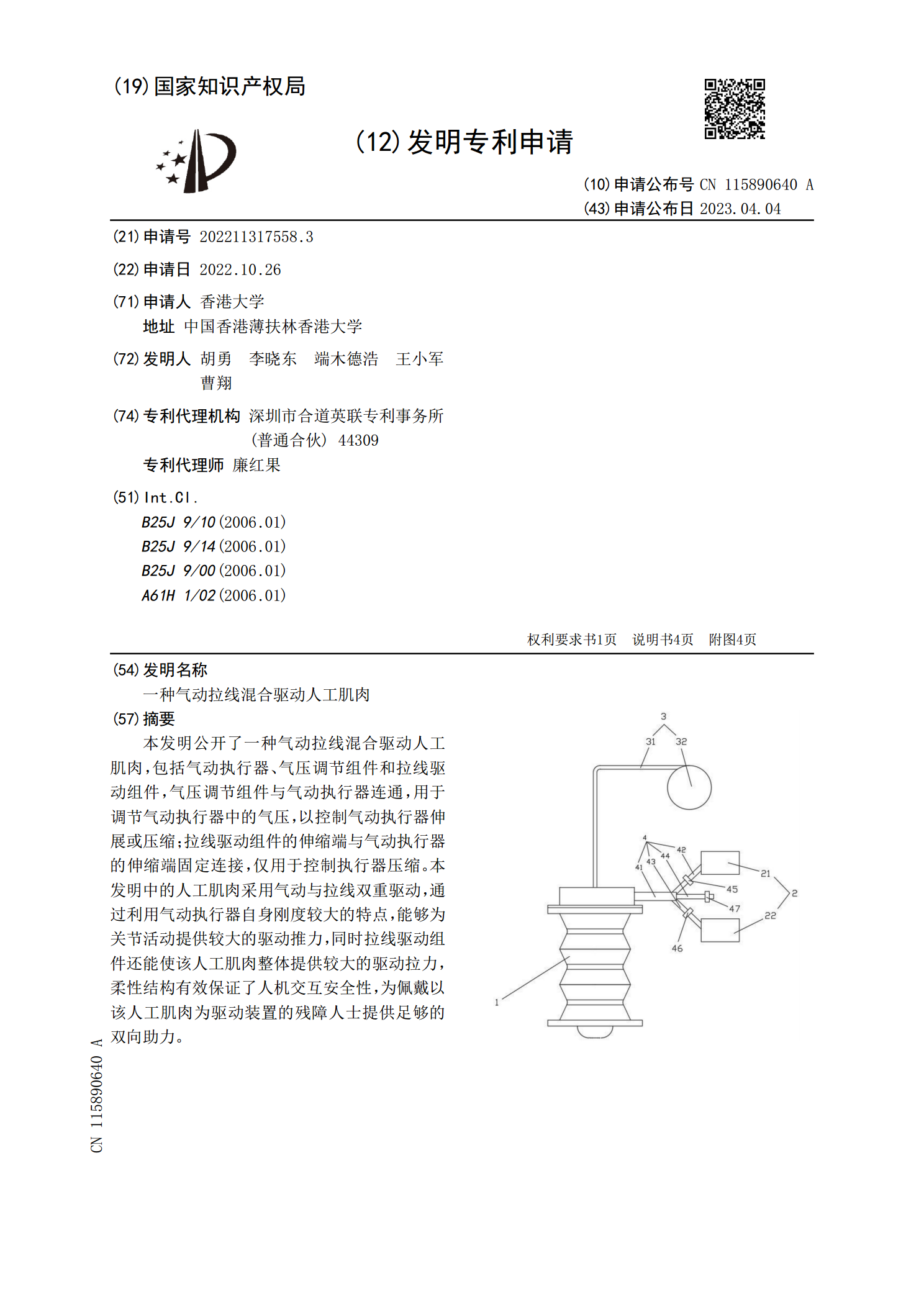
一种气动拉线混合驱动人工肌肉.pdf
本发明公开了一种气动拉线混合驱动人工肌肉,包括气动执行器、气压调节组件和拉线驱动组件,气压调节组件与气动执行器连通,用于调节气动执行器中的气压,以控制气动执行器伸展或压缩;拉线驱动组件的伸缩端与气动执行器的伸缩端固定连接,仅用于控制执行器压缩。本发明中的人工肌肉采用气动与拉线双重驱动,通过利用气动执行器自身刚度较大的特点,能够为关节活动提供较大的驱动推力,同时拉线驱动组件还能使该人工肌肉整体提供较大的驱动拉力,柔性结构有效保证了人机交互安全性,为佩戴以该人工肌肉为驱动装置的残障人士提供足够的双向助力。

气动肌肉驱动的变转轴仿生关节.pdf
本发明属于仿生机构设计领域,涉及一种气动肌肉驱动的变转轴仿生关节。它解决了现有技术设计不够合理等技术问题。包括筒身,筒身上侧固设有上法兰,筒身一侧穿设有第一柔性连杆组件,另一侧穿设有第二柔性连杆组件,筒身下侧穿设有第三柔性连杆组件,筒身内上侧设有弹性件,筒身内设有具有内凹侧边弧形的曲线边缘转盘,曲线边缘转盘上固连有摆动杆,摆动杆下端位于筒身外且固连安装板,安装板上固连有下法兰。优点在于:设计合理,结构简单,机构调解灵活,通用性强,柔性连接组件使得仿生关节柔顺性好,抖动小,滑轮组件使得关节摆角范围大,负载能
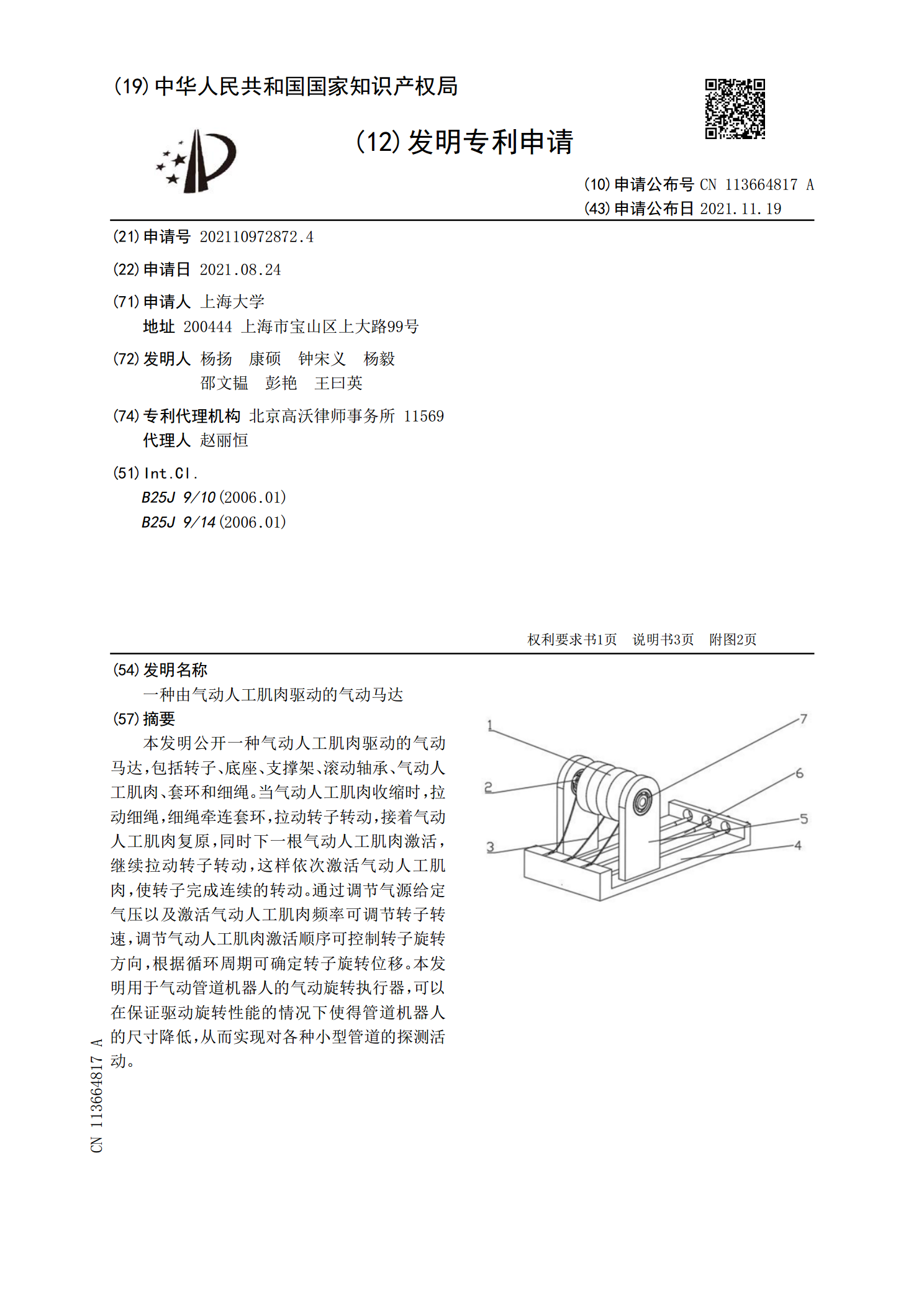
一种由气动人工肌肉驱动的气动马达.pdf
本发明公开一种气动人工肌肉驱动的气动马达,包括转子、底座、支撑架、滚动轴承、气动人工肌肉、套环和细绳。当气动人工肌肉收缩时,拉动细绳,细绳牵连套环,拉动转子转动,接着气动人工肌肉复原,同时下一根气动人工肌肉激活,继续拉动转子转动,这样依次激活气动人工肌肉,使转子完成连续的转动。通过调节气源给定气压以及激活气动人工肌肉频率可调节转子转速,调节气动人工肌肉激活顺序可控制转子旋转方向,根据循环周期可确定转子旋转位移。本发明用于气动管道机器人的气动旋转执行器,可以在保证驱动旋转性能的情况下使得管道机器人的尺寸降低