
拮抗式气动肌肉驱动的变转轴大转角仿生膝关节.pdf

Ma****57

1/8
2/8

3/8
4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
拮抗式气动肌肉驱动的变转轴大转角仿生膝关节.pdf
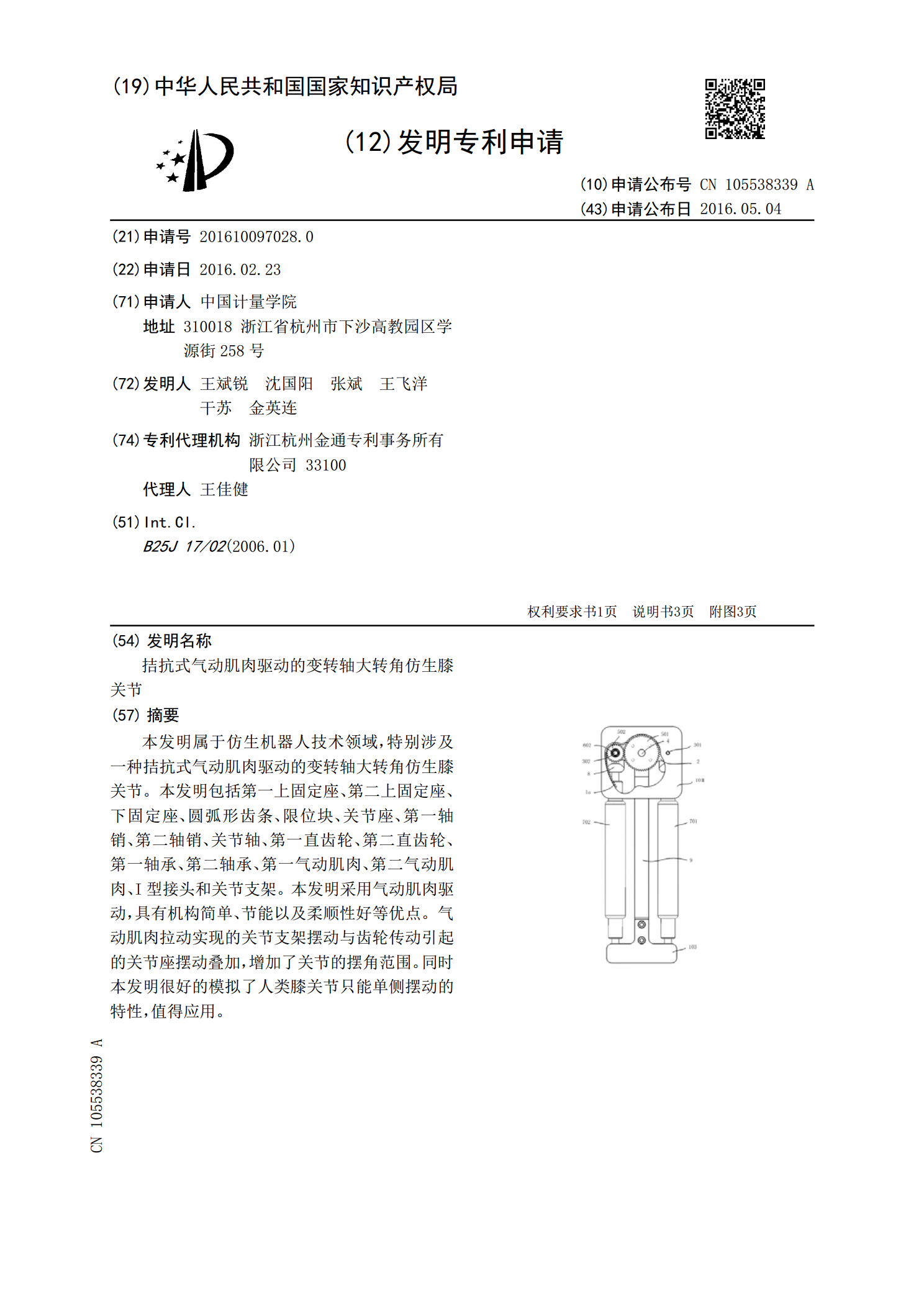
本发明属于仿生机器人技术领域,特别涉及一种拮抗式气动肌肉驱动的变转轴大转角仿生膝关节。本发明包括第一上固定座、第二上固定座、下固定座、圆弧形齿条、限位块、关节座、第一轴销、第二轴销、关节轴、第一直齿轮、第二直齿轮、第一轴承、第二轴承、第一气动肌肉、第二气动肌肉、I型接头和关节支架。本发明采用气动肌肉驱动,具有机构简单、节能以及柔顺性好等优点。气动肌肉拉动实现的关节支架摆动与齿轮传动引起的关节座摆动叠加,增加了关节的摆角范围。同时本发明很好的模拟了人类膝关节只能单侧摆动的特性,值得应用。

气动肌肉驱动的变转轴仿生关节.pdf
本发明属于仿生机构设计领域,涉及一种气动肌肉驱动的变转轴仿生关节。它解决了现有技术设计不够合理等技术问题。包括筒身,筒身上侧固设有上法兰,筒身一侧穿设有第一柔性连杆组件,另一侧穿设有第二柔性连杆组件,筒身下侧穿设有第三柔性连杆组件,筒身内上侧设有弹性件,筒身内设有具有内凹侧边弧形的曲线边缘转盘,曲线边缘转盘上固连有摆动杆,摆动杆下端位于筒身外且固连安装板,安装板上固连有下法兰。优点在于:设计合理,结构简单,机构调解灵活,通用性强,柔性连接组件使得仿生关节柔顺性好,抖动小,滑轮组件使得关节摆角范围大,负载能
一种气动肌肉驱动灵长类仿生机器人.pdf
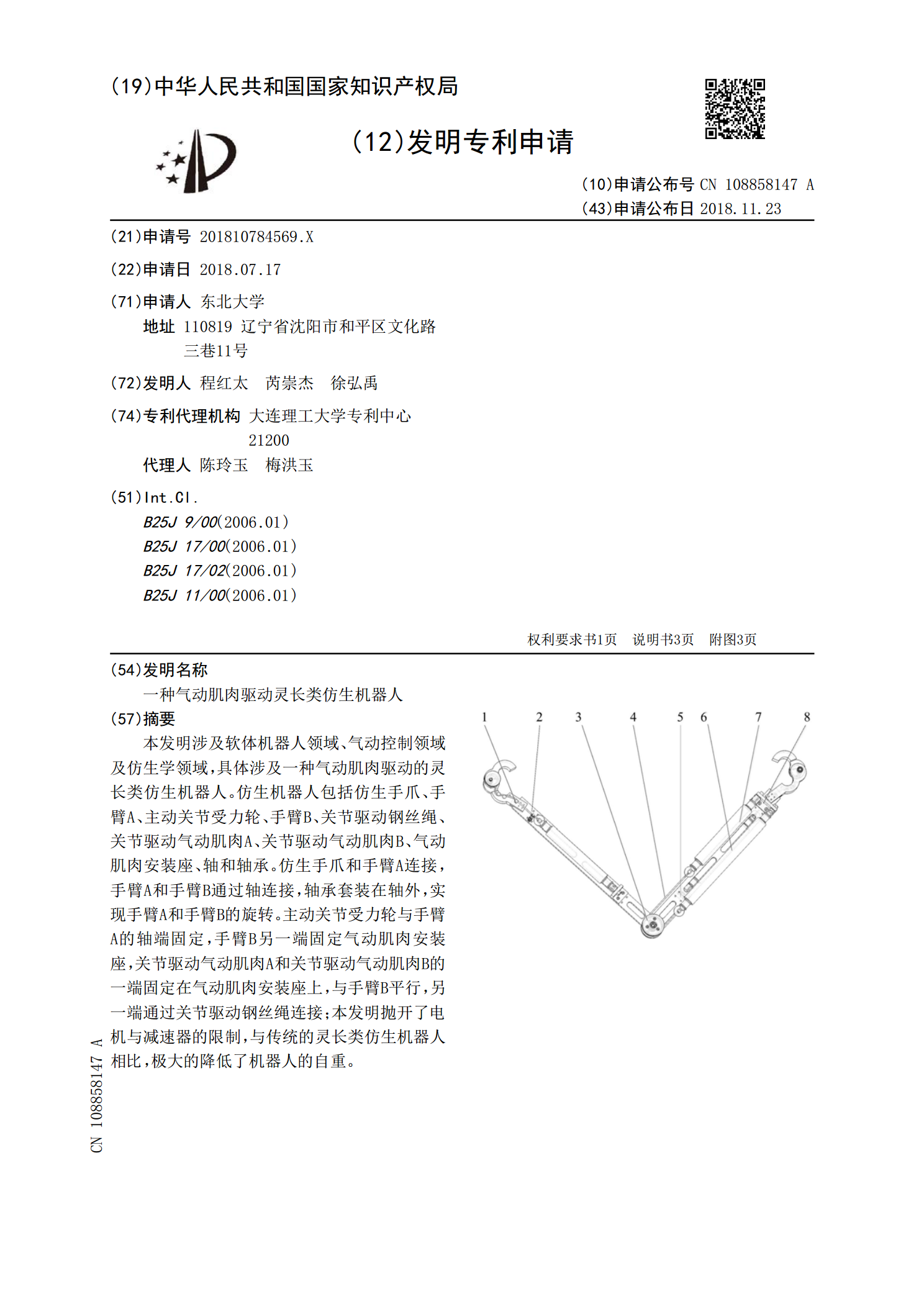
本发明涉及软体机器人领域、气动控制领域及仿生学领域,具体涉及一种气动肌肉驱动的灵长类仿生机器人。仿生机器人包括仿生手爪、手臂A、主动关节受力轮、手臂B、关节驱动钢丝绳、关节驱动气动肌肉A、关节驱动气动肌肉B、气动肌肉安装座、轴和轴承。仿生手爪和手臂A连接,手臂A和手臂B通过轴连接,轴承套装在轴外,实现手臂A和手臂B的旋转。主动关节受力轮与手臂A的轴端固定,手臂B另一端固定气动肌肉安装座,关节驱动气动肌肉A和关节驱动气动肌肉B的一端固定在气动肌肉安装座上,与手臂B平行,另一端通过关节驱动钢丝绳连接;本发明抛

基于气动柔性驱动的膝关节康复训练变刚度控制研究.docx
基于气动柔性驱动的膝关节康复训练变刚度控制研究摘要本文研究了基于气动柔性驱动的膝关节康复训练的变刚度控制方法,通过对气动柔性驱动的介绍和膝关节康复训练的分析,提出了一种变刚度控制方法,该方法可以根据康复患者当前的膝关节活动能力,实现低刚度和高刚度两种训练模式的自适应切换。实验结果表明,该方法可以有效地提高膝关节康复训练的效果和康复患者的康复速度。关键词:气动柔性驱动;膝关节康复训练;刚度控制;自适应切换ABSTRACTThispaperstudiesthevariablestiffnesscontrolm

气动肌肉驱动的膝关节康复训练装置控制方法研究的任务书.docx
气动肌肉驱动的膝关节康复训练装置控制方法研究的任务书任务书一、背景介绍近年来,由于生活方式的改变,膝关节损伤的发病率不断上升。膝关节是人体重要的关节之一,它承受着人体重量和各种运动的作用。当膝关节出现损伤或其他疾病时,它会对人的日常生活和运动能力造成很大的影响。因此,对于膝关节患者来说,进行康复训练是十分重要的。目前,膝关节康复训练的方法有很多种,常用的有物理治疗、理疗、按摩等。然而,这些方法都存在着一些不足之处,比如治疗效果不稳定、治疗时间过长、操作比较繁琐等问题。因此,研究一种新的膝关节康复训练装置来