
一种飞机防滑刹车控制方法.pdf

一只****签网


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
飞机刹车防滑控制方法及飞机刹车系统.pdf
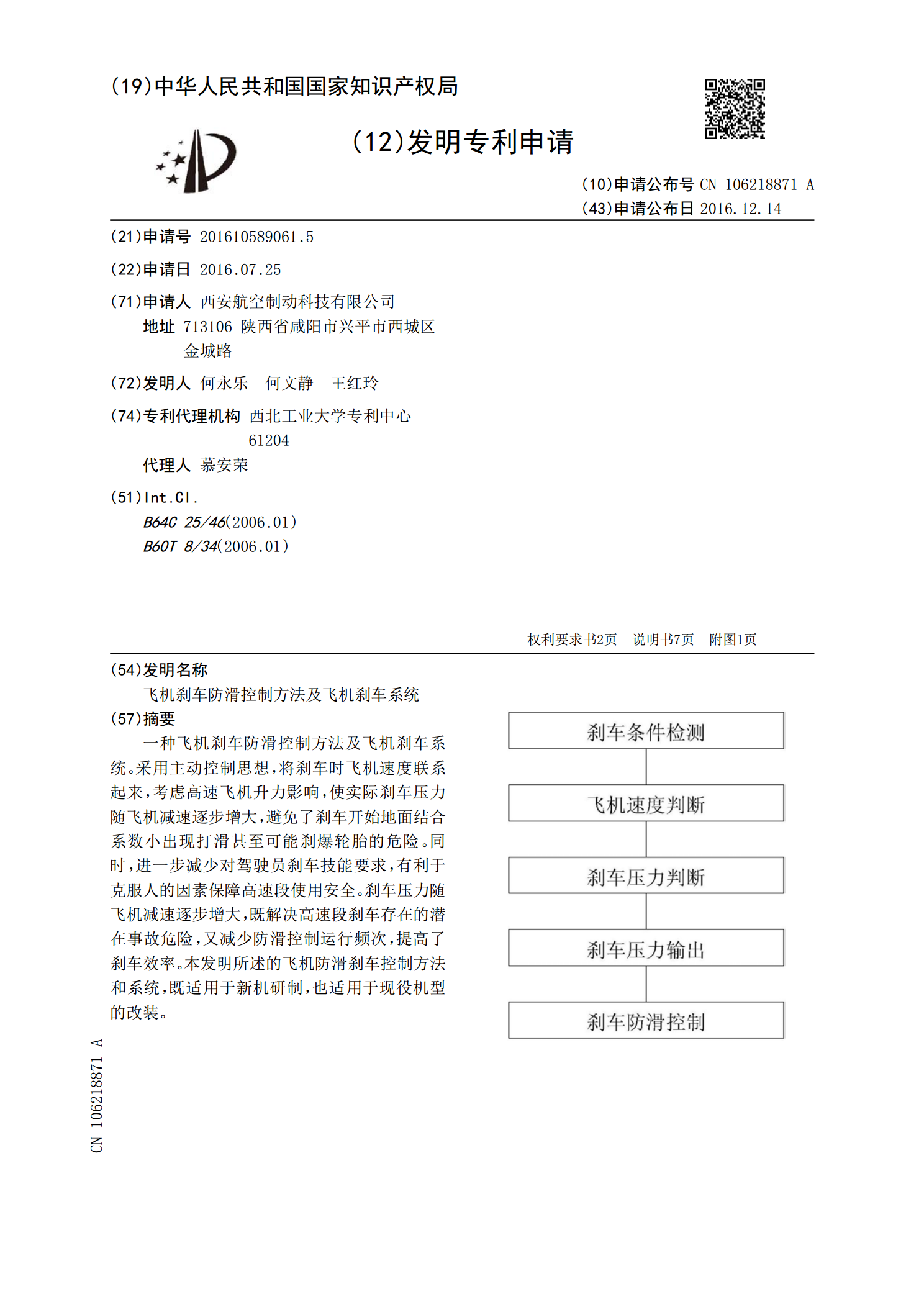
一种飞机刹车防滑控制方法及飞机刹车系统。采用主动控制思想,将刹车时飞机速度联系起来,考虑高速飞机升力影响,使实际刹车压力随飞机减速逐步增大,避免了刹车开始地面结合系数小出现打滑甚至可能刹爆轮胎的危险。同时,进一步减少对驾驶员刹车技能要求,有利于克服人的因素保障高速段使用安全。刹车压力随飞机减速逐步增大,既解决高速段刹车存在的潜在事故危险,又减少防滑控制运行频次,提高了刹车效率。本发明所述的飞机防滑刹车控制方法和系统,既适用于新机研制,也适用于现役机型的改装。

一种飞机防滑刹车控制方法.pdf
本发明涉及一种飞机防滑刹车控制方法,该飞机防滑刹车控制方法,借助跟踪微分器或者二阶滑模微分器的鲁棒抗干扰特性,构造出飞机减速率信号,用于滑移力计算,避免了对纵向动力学过程进行学习辨识;该方法无需假设刹车纵向力是均匀分布,可用于多轮刹车系统;此外,考虑到刹车系统的安全工作范围,对刹车压力进行约束,兼顾了防滑刹车效率和防抱死安全性,具有一定的先进性。

一种飞机防滑刹车控制方法.pdf
本发明涉及一种飞机防滑刹车控制方法,该飞机防滑刹车控制方法,借助跟踪微分器或者二阶滑模微分器的鲁棒抗干扰特性,构造出飞机减速率信号,用于滑移力计算,避免了对纵向动力学过程进行学习辨识;该方法无需假设刹车纵向力是均匀分布,可用于多轮刹车系统;此外,考虑到刹车系统的安全工作范围,对刹车压力进行约束,兼顾了防滑刹车效率和防抱死安全性,具有一定的先进性。

一种飞机防滑刹车控制方法.pdf
本发明涉及一种飞机防滑刹车控制方法,该飞机防滑刹车控制方法,借助跟踪微分器或者二阶滑模微分器的鲁棒抗干扰特性,构造出飞机减速率信号,用于滑移力计算,避免了对纵向动力学过程进行学习辨识;该方法无需假设刹车纵向力是均匀分布,可用于多轮刹车系统;此外,考虑到刹车系统的安全工作范围,对刹车压力进行约束,兼顾了防滑刹车效率和防抱死安全性,具有一定的先进性。
一种飞机防滑刹车控制系统及控制方法.pdf
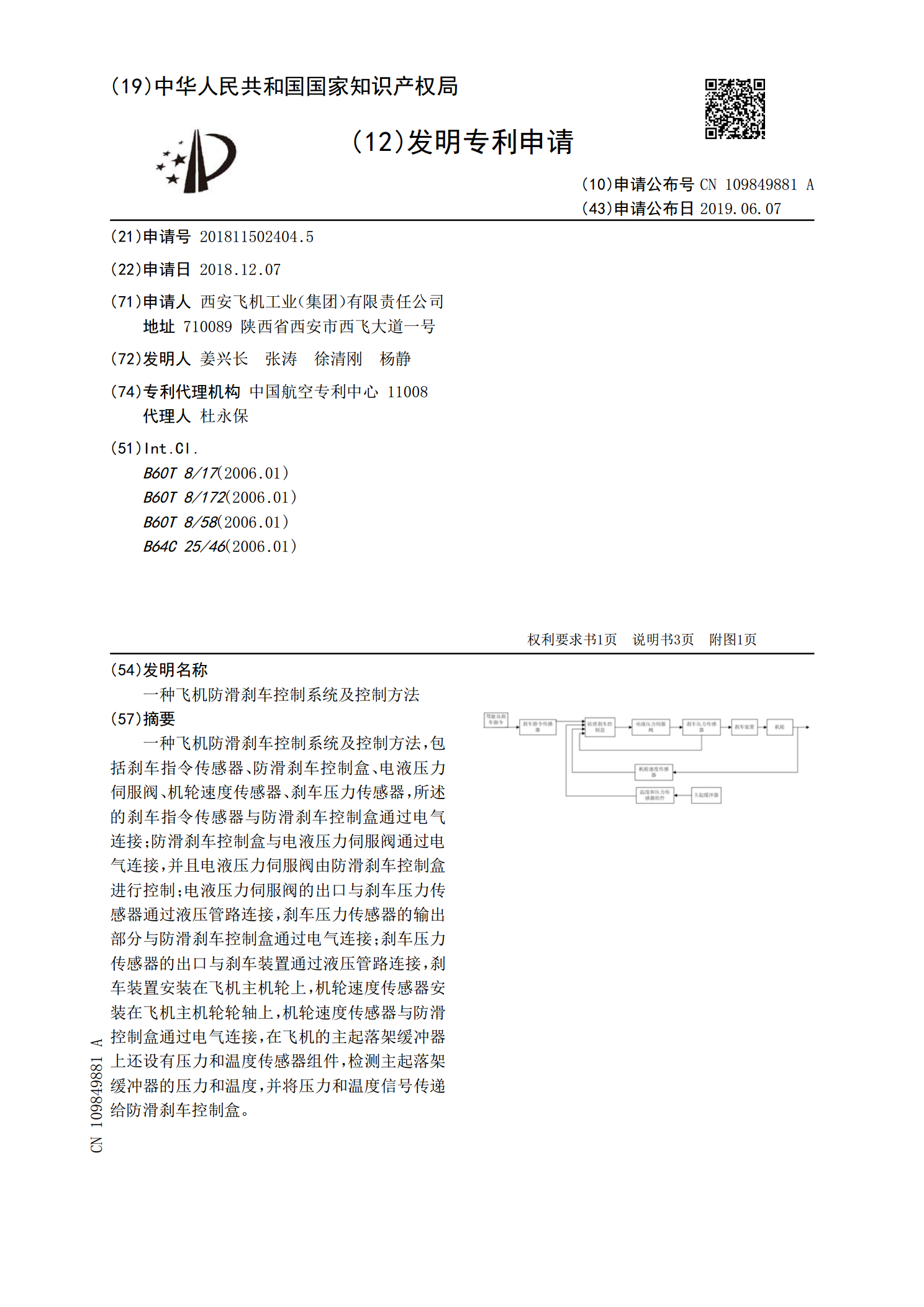
一种飞机防滑刹车控制系统及控制方法,包括刹车指令传感器、防滑刹车控制盒、电液压力伺服阀、机轮速度传感器、刹车压力传感器,所述的刹车指令传感器与防滑刹车控制盒通过电气连接;防滑刹车控制盒与电液压力伺服阀通过电气连接,并且电液压力伺服阀由防滑刹车控制盒进行控制;电液压力伺服阀的出口与刹车压力传感器通过液压管路连接,刹车压力传感器的输出部分与防滑刹车控制盒通过电气连接;刹车压力传感器的出口与刹车装置通过液压管路连接,刹车装置安装在飞机主机轮上,机轮速度传感器安装在飞机主机轮轮轴上,机轮速度传感器与防滑控制盒通过