
手势识别方法及装置.pdf

桂香****盟主

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

手势识别方法及装置.pdf
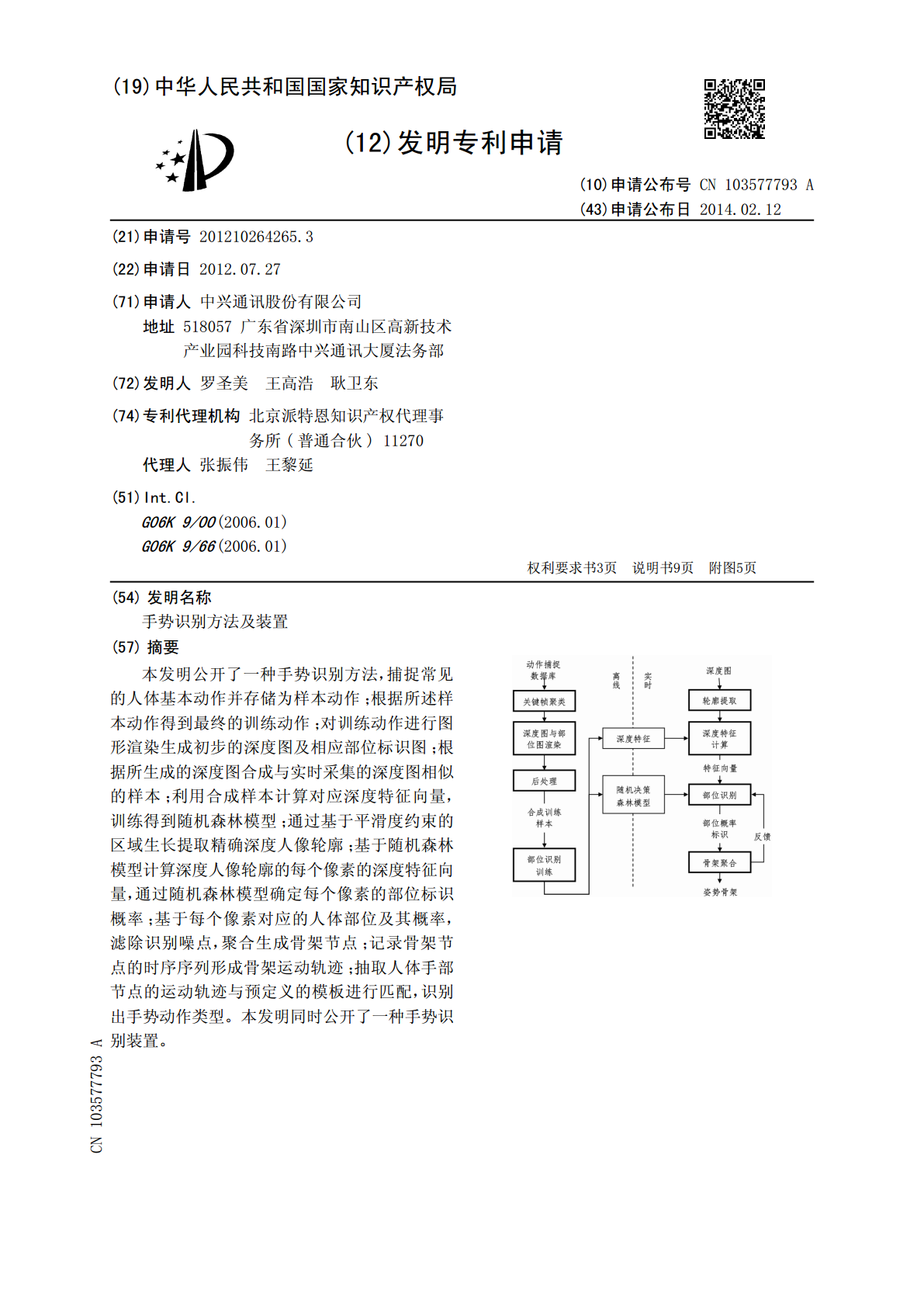
本发明公开了一种手势识别方法,捕捉常见的人体基本动作并存储为样本动作;根据所述样本动作得到最终的训练动作;对训练动作进行图形渲染生成初步的深度图及相应部位标识图;根据所生成的深度图合成与实时采集的深度图相似的样本;利用合成样本计算对应深度特征向量,训练得到随机森林模型;通过基于平滑度约束的区域生长提取精确深度人像轮廓;基于随机森林模型计算深度人像轮廓的每个像素的深度特征向量,通过随机森林模型确定每个像素的部位标识概率;基于每个像素对应的人体部位及其概率,滤除识别噪点,聚合生成骨架节点;记录骨架节点的时序序
手势识别方法和装置.pdf
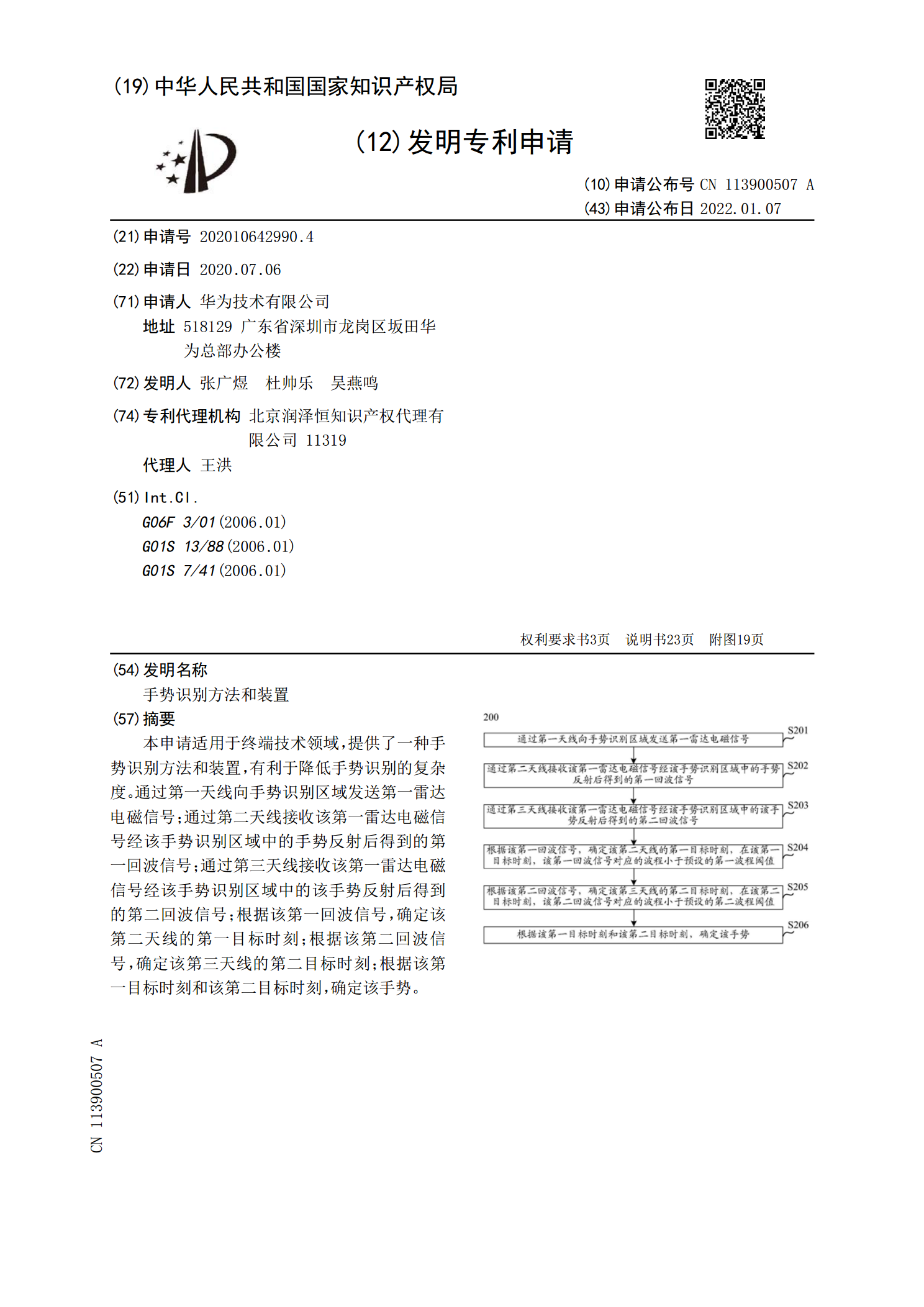
本申请适用于终端技术领域,提供了一种手势识别方法和装置,有利于降低手势识别的复杂度。通过第一天线向手势识别区域发送第一雷达电磁信号;通过第二天线接收该第一雷达电磁信号经该手势识别区域中的手势反射后得到的第一回波信号;通过第三天线接收该第一雷达电磁信号经该手势识别区域中的该手势反射后得到的第二回波信号;根据该第一回波信号,确定该第二天线的第一目标时刻;根据该第二回波信号,确定该第三天线的第二目标时刻;根据该第一目标时刻和该第二目标时刻,确定该手势。
手势识别方法及装置、终端.pdf
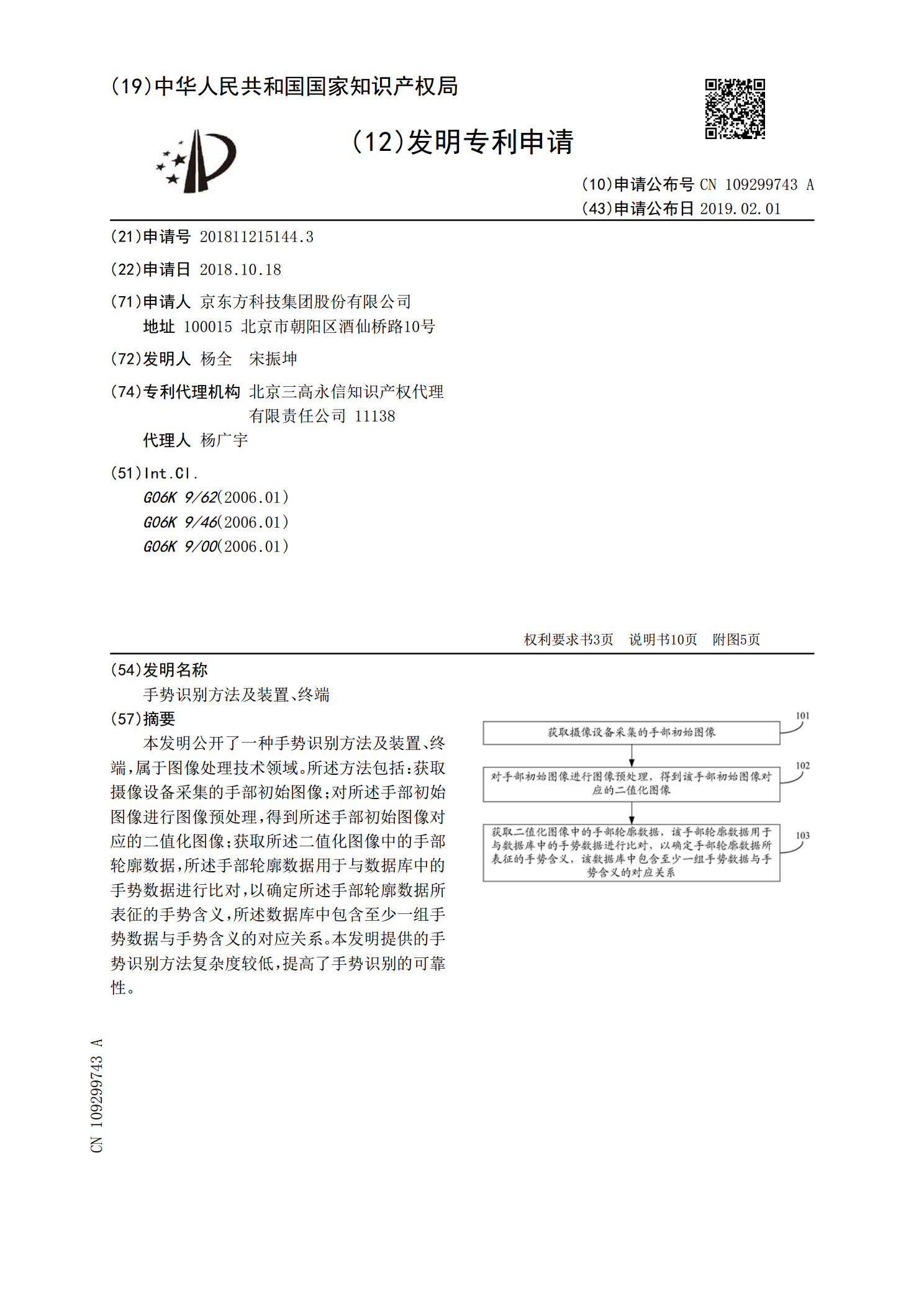
本发明公开了一种手势识别方法及装置、终端,属于图像处理技术领域。所述方法包括:获取摄像设备采集的手部初始图像;对所述手部初始图像进行图像预处理,得到所述手部初始图像对应的二值化图像;获取所述二值化图像中的手部轮廓数据,所述手部轮廓数据用于与数据库中的手势数据进行比对,以确定所述手部轮廓数据所表征的手势含义,所述数据库中包含至少一组手势数据与手势含义的对应关系。本发明提供的手势识别方法复杂度较低,提高了手势识别的可靠性。

手势识别模型训练方法、手势识别方法及装置.pdf
本申请涉及一种手势识别模型训练方法,包括:构建特征提取网络框架;基于特征提取网络框架构建全局模型、至少一个局部模型和至少一个新域模型;基于全局模型的参数和局部手势训练数据训练局部模型,以更新局部模型的参数;基于全局模型的参数和个性化手势训练数据训练新域模型,以更新新域模型的参数;基于更新后的局部模型的参数和更新后的新域模型的参数更新全局模型的参数。本申请的手势识别模型训练方法至少具有以下有益技术效果之一:能够得到泛化的跨域通用手势识别模型和多个个性化的局部模型,进而提高跨域高精度的目标手势识别率,并减少集
手势识别模型训练、手势识别方法、装置、设备及介质.pdf
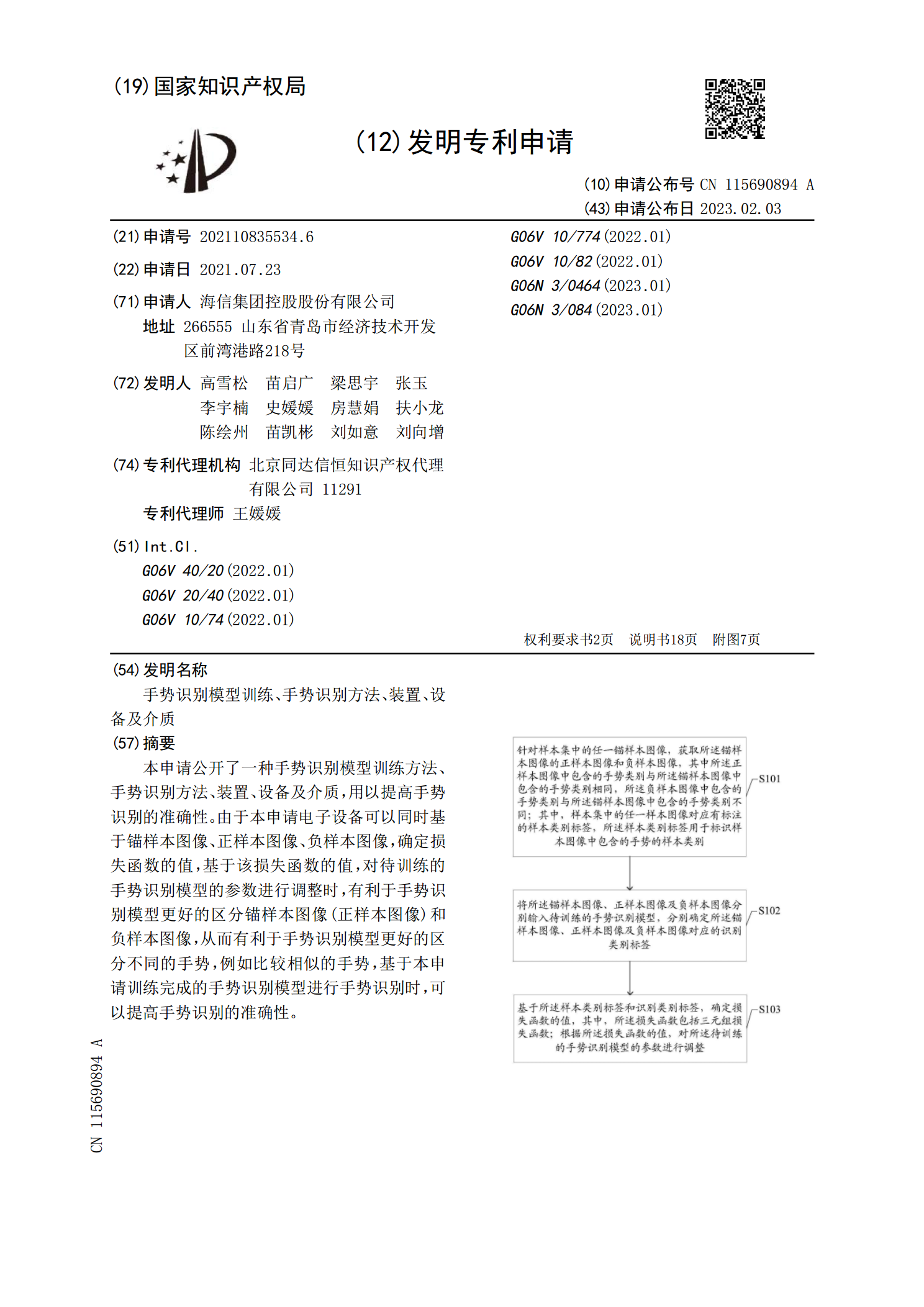
本申请公开了一种手势识别模型训练方法、手势识别方法、装置、设备及介质,用以提高手势识别的准确性。由于本申请电子设备可以同时基于锚样本图像、正样本图像、负样本图像,确定损失函数的值,基于该损失函数的值,对待训练的手势识别模型的参数进行调整时,有利于手势识别模型更好的区分锚样本图像(正样本图像)和负样本图像,从而有利于手势识别模型更好的区分不同的手势,例如比较相似的手势,基于本申请训练完成的手势识别模型进行手势识别时,可以提高手势识别的准确性。