
一维非均匀齿轮形貌点云精确配准方法.pdf

秀美****甜v


1/9

2/9

3/9

4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一维非均匀齿轮形貌点云精确配准方法.pdf
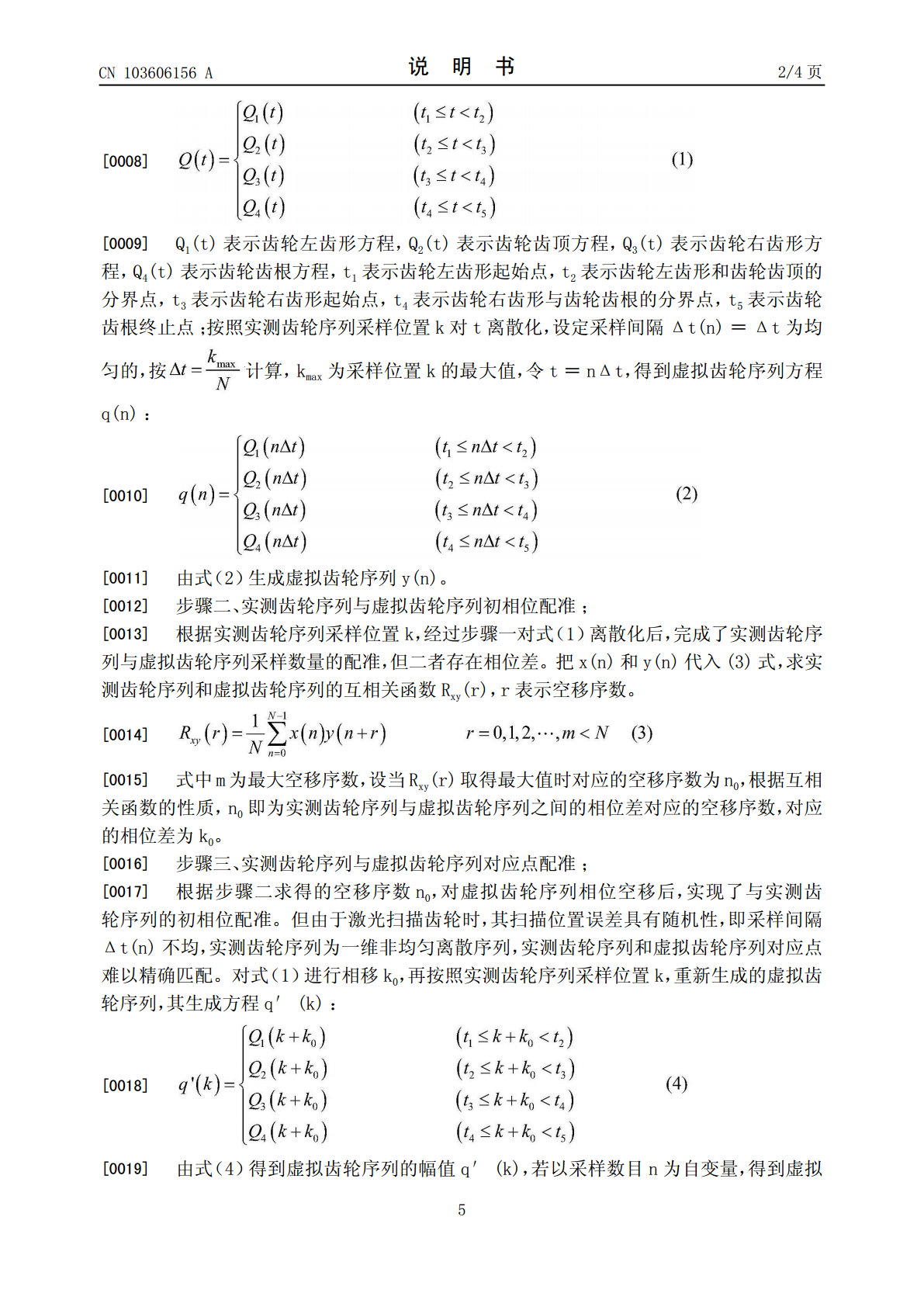
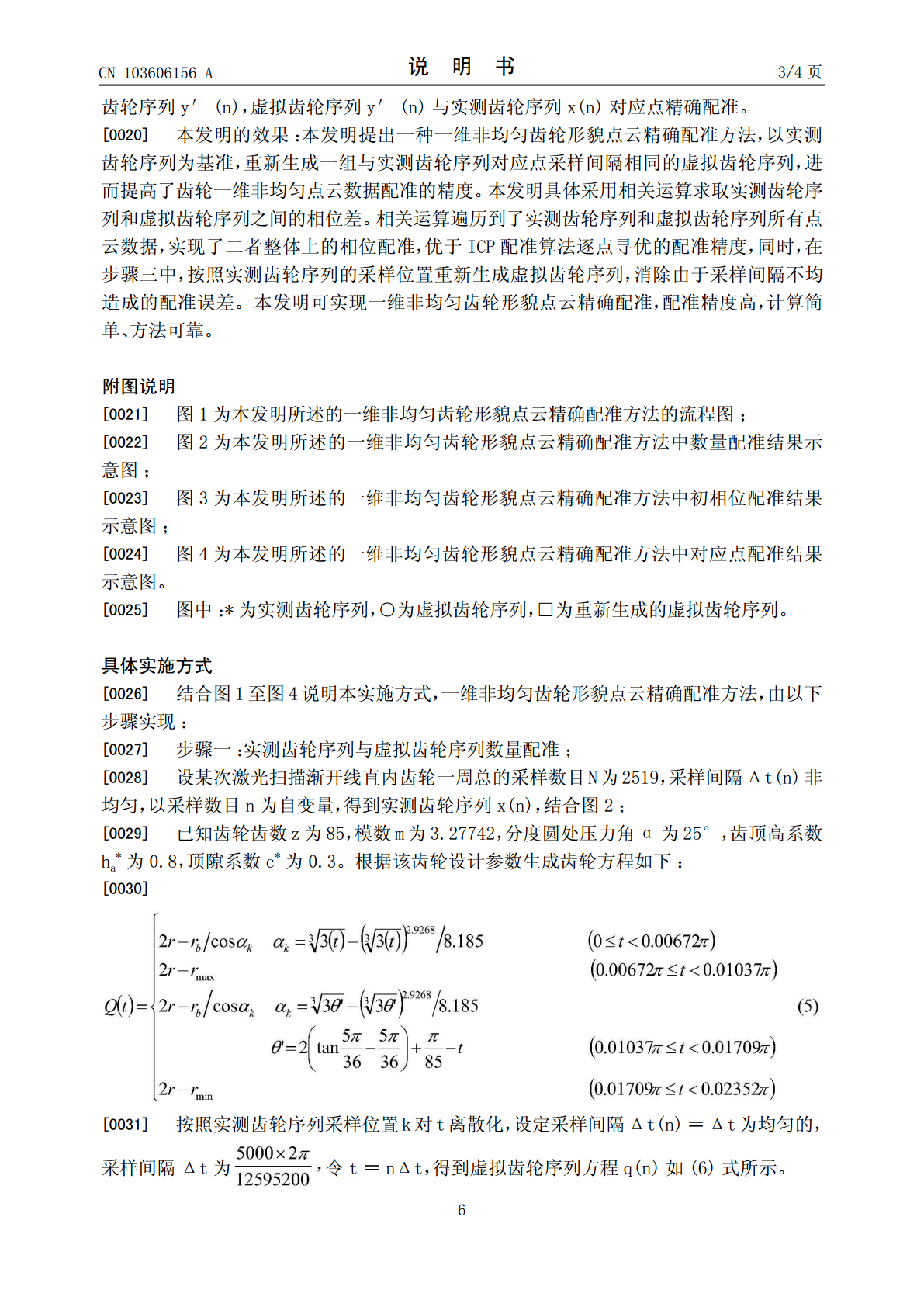
一维非均匀齿轮形貌点云精确配准方法,涉及数据处理领域,本发明为解决现有采用ICP配准算法对实测齿轮序列与虚拟齿轮序列的对应点进行配准,存在由于对应点采样间隔不同而导致离散序列配准误差较大的问题,包括:步骤一、实测齿轮序列与虚拟齿轮序列数量配准;步骤二、实测齿轮序列与虚拟齿轮序列初相位配准;步骤三、实测齿轮序列与虚拟齿轮序列对应点配准;本发明以实测齿轮序列为基准,重新生成一组与实测齿轮序列对应点采样间隔相同的虚拟齿轮序列,进而提高了齿轮一维非均匀点云数据配准的精度。本发明可实现一维非均匀齿轮形貌点云精确配准
密集点云模型快速精确配准方法.pdf
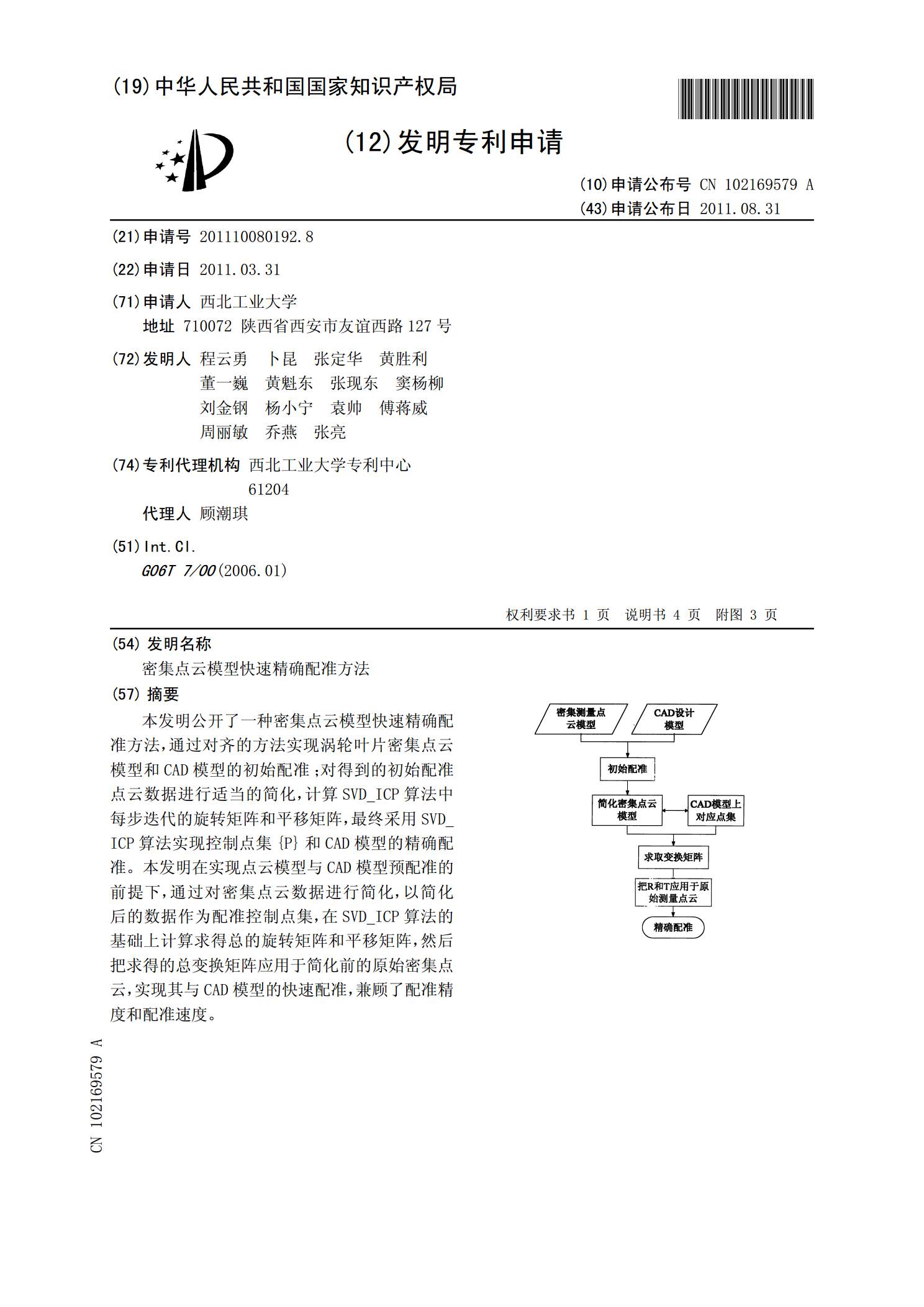
本发明公开了一种密集点云模型快速精确配准方法,通过对齐的方法实现涡轮叶片密集点云模型和CAD模型的初始配准;对得到的初始配准点云数据进行适当的简化,计算SVD_ICP算法中每步迭代的旋转矩阵和平移矩阵,最终采用SVD_ICP算法实现控制点集{P}和CAD模型的精确配准。本发明在实现点云模型与CAD模型预配准的前提下,通过对密集点云数据进行简化,以简化后的数据作为配准控制点集,在SVD_ICP算法的基础上计算求得总的旋转矩阵和平移矩阵,然后把求得的总变换矩阵应用于简化前的原始密集点云,实现其与CAD模型的快

点云配准方法.ppt
ABriefIntroductionOfPointCloudRegistrationMethodPointCloudRegistrationMethod1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudReg
一种非刚性点云配准方法.pdf
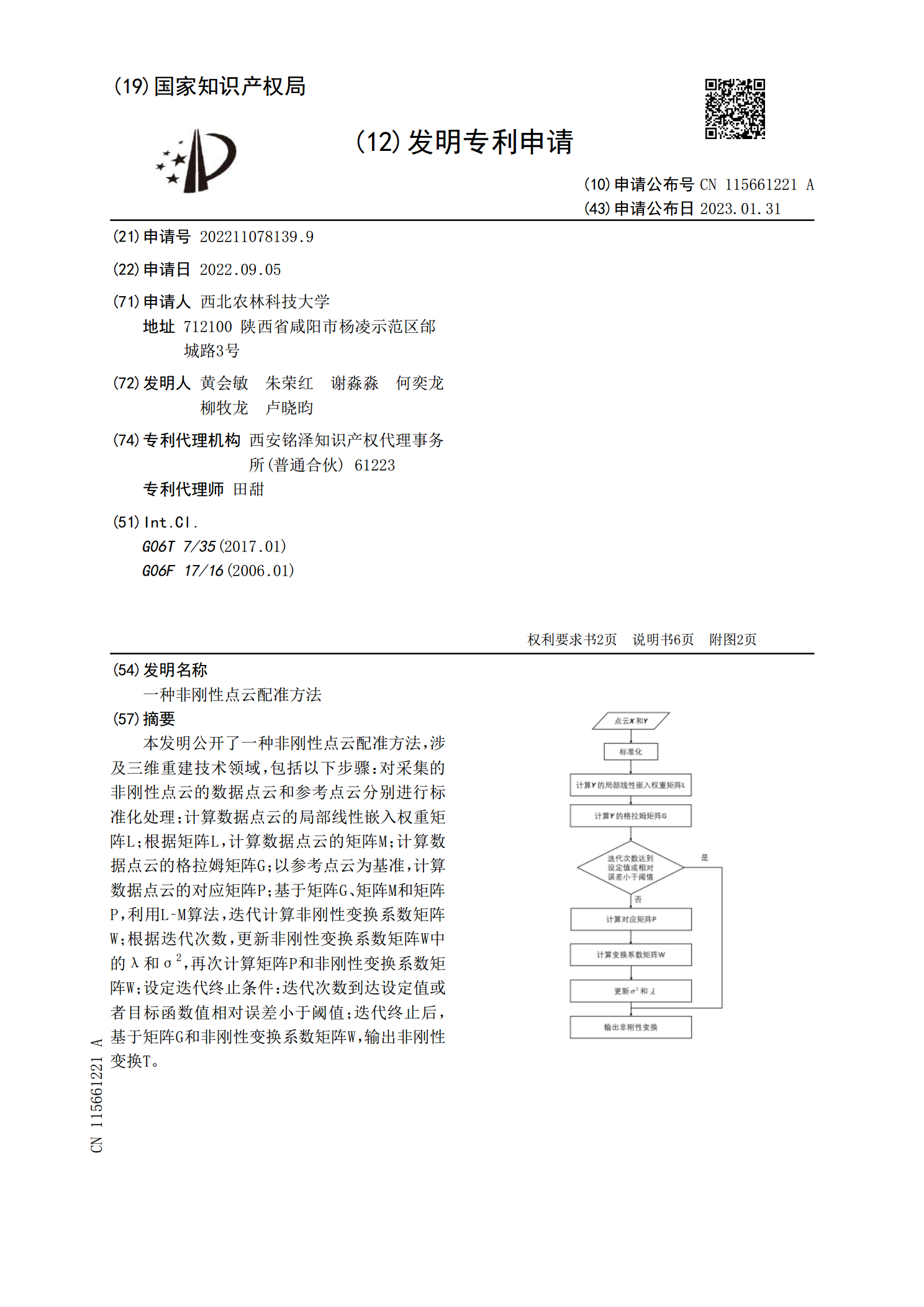
本发明公开了一种非刚性点云配准方法,涉及三维重建技术领域,包括以下步骤:对采集的非刚性点云的数据点云和参考点云分别进行标准化处理;计算数据点云的局部线性嵌入权重矩阵L;根据矩阵L,计算数据点云的矩阵M;计算数据点云的格拉姆矩阵G;以参考点云为基准,计算数据点云的对应矩阵P;基于矩阵G、矩阵M和矩阵P,利用L‑M算法,迭代计算非刚性变换系数矩阵W;根据迭代次数,更新非刚性变换系数矩阵W中的λ和σ

单空间点云配准方法及装置.pdf
本发明提供一种单空间点云配准方法及装置,涉及点云配准领域。方法包括:从单空间获取多片点云,任取两片作为源点云和目标点云;对两片点云旋转得到高度方向垂直于地面且轮廓边平行于XOY平面坐标系中任一坐标轴的两片点云;利用两种点云数据中表示门窗的点信息进行方位匹配,获取三维点信息准确匹配的门窗对并对目标点云再次旋转;计算源点云中心到目标点云中心的矢量,根据源点云中心、目标点云中心以及矢量的关系获取重合源点云和目标点云;根据迭代最近点算法对重合源点云和目标点云再配准。本发明实施例的单空间点云配准方法及装置能够对单空