
一种基于ARM的救援探测机器人的设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于ARM的救援探测机器人的设计.docx
一种基于ARM的救援探测机器人的设计随着科技的不断发展,机器人技术已经成为现代工业和科学技术的重要组成部分,特别是在应用范围越来越广泛的救援领域,机器人技术显得尤为重要。本文介绍一种基于ARM的救援探测机器人的设计。1.机器人架构救援探测机器人采用双履带式机器人,结构紧凑,适合在狭窄环境中操作。机器人采用ARM架构的处理器,例如RaspberryPi或者BeagleBoneBlack,这些处理器具有较高的性能和低功耗特性,同时也可以方便地连接各种传感器。2.传感器机器人配备多种传感器,包括红外、超声波、光

基于ARM平台的智能探测救援机器人设计与实现的中期报告.docx
基于ARM平台的智能探测救援机器人设计与实现的中期报告项目简介:本项目旨在设计和制造一款基于ARM平台的智能探测救援机器人,具备适应不同地形和环境的能力,可以进行探测、识别、定位和救援任务。中期进展:在前期的需求分析和功能设计基础上,我们完成了机器人底盘和控制系统的搭建。底盘采用四轮驱动,可实现全向移动和较强的越障能力。控制系统采用STM32F4单片机和多路传感器,实现了运动控制、传感器数据采集和通信功能。具体进展如下:1.机器人底盘设计底盘采用铝合金材料,结构简单紧凑,重量轻,适应不同环境需求。底盘由四

基于ARM平台的智能探测救援机器人设计与实现的任务书.docx
基于ARM平台的智能探测救援机器人设计与实现的任务书任务书一、任务目标本次任务旨在设计和实现一个基于ARM平台的智能探测救援机器人。该机器人可以自主探测和识别环境中的障碍物,并进行相应的救援工作。任务的目标是熟练运用ARM平台的技术和方法,实现机器人探测和救援的功能,提高对嵌入式技术的理解和应用能力。二、任务内容1.硬件设计和搭建(1)了解机器人的物理结构和基本构成,并选取合适的电机、传感器等元件进行硬件搭建。(2)掌握ARM芯片的硬件驱动技术和相关应用,完成其与机器人各部件的连接。2.软件设计和实现(1

基于ARM的探测机器人.pdf
本发明公开了一种基于ARM的探测机器人,包括履带行走机构、ARM处理器、机体、辅助行走轮、辅助行走支杆、气体收集装置、连接管、气体分析装置、温度传感器、转轴、升降杆和观察摄像头,履带行走机构上端设有机体,机体内中部设有ARM处理器,机体两端为凹槽状,机体一端的凹槽内设有气体收集装置,机体另一端凹槽内设有温度传感器,机体内设有气体分析装置,气体收集装置与气体分析装置通过连接管连接,机体顶部两端设有辅助行走支杆,辅助行走支杆顶端设有辅助行走轮,机体侧部通过转轴连接升降杆,升降杆端部设有观察摄像头。本发明结构简
一种基于计算机的探测救援机器人.pdf
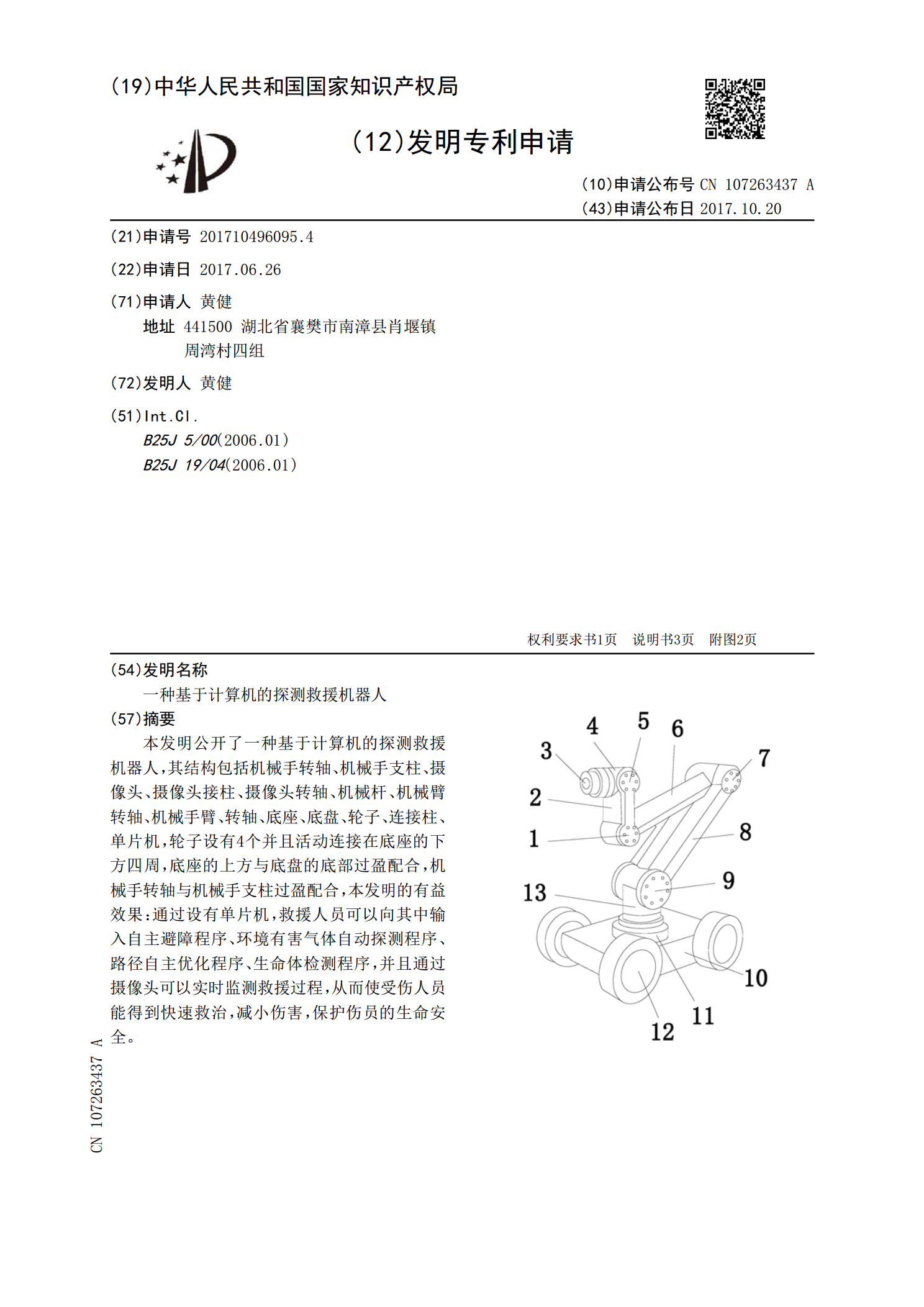
本发明公开了一种基于计算机的探测救援机器人,其结构包括机械手转轴、机械手支柱、摄像头、摄像头接柱、摄像头转轴、机械杆、机械臂转轴、机械手臂、转轴、底座、底盘、轮子、连接柱、单片机,轮子设有4个并且活动连接在底座的下方四周,底座的上方与底盘的底部过盈配合,机械手转轴与机械手支柱过盈配合,本发明的有益效果:通过设有单片机,救援人员可以向其中输入自主避障程序、环境有害气体自动探测程序、路径自主优化程序、生命体检测程序,并且通过摄像头可以实时监测救援过程,从而使受伤人员能得到快速救治,减小伤害,保护伤员的生命安全