
两轮平衡车的定速巡航方法和系统.pdf

努力****甲寅


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

两轮平衡车的定速巡航方法和系统.pdf
本发明公开了一种两轮平衡车的定速巡航方法,包括步骤:检测并控制车体满足定速巡航条件;车体进入定速巡航模式,驱动车体以恒定的速度行驶;检测车体的运行状态,使用者控制车体退出定速巡航模式。本发明简单、实用,便于操作,控制平衡车以设定的速度匀速行驶,提高平衡车的舒适度与便捷性。
两轮平衡车控制系统及两轮平衡车.pdf
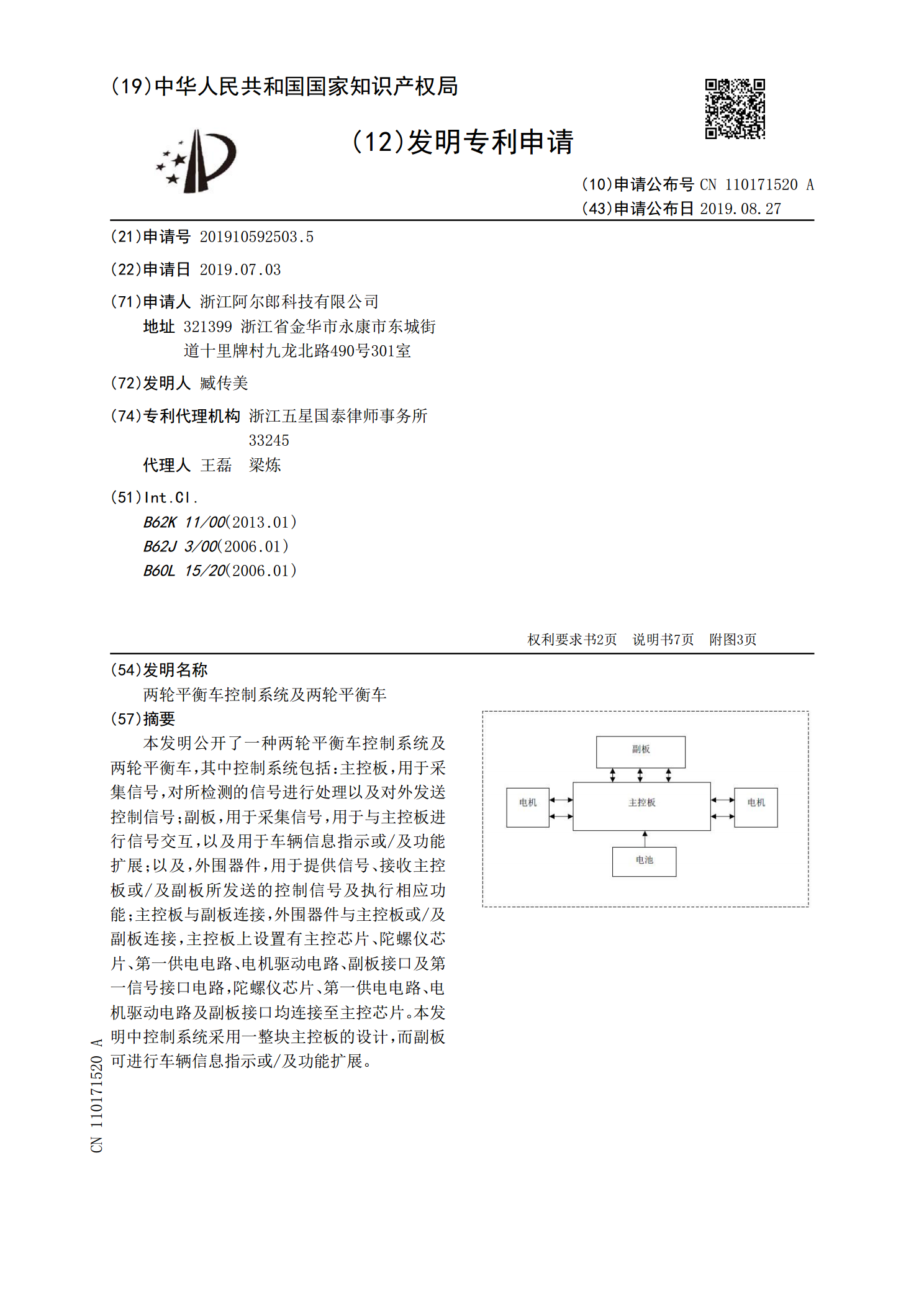
本发明公开了一种两轮平衡车控制系统及两轮平衡车,其中控制系统包括:主控板,用于采集信号,对所检测的信号进行处理以及对外发送控制信号;副板,用于采集信号,用于与主控板进行信号交互,以及用于车辆信息指示或/及功能扩展;以及,外围器件,用于提供信号、接收主控板或/及副板所发送的控制信号及执行相应功能;主控板与副板连接,外围器件与主控板或/及副板连接,主控板上设置有主控芯片、陀螺仪芯片、第一供电电路、电机驱动电路、副板接口及第一信号接口电路,陀螺仪芯片、第一供电电路、电机驱动电路及副板接口均连接至主控芯片。本发明
两轮车的定速巡航控制方法、装置、两轮车及可读介质.pdf
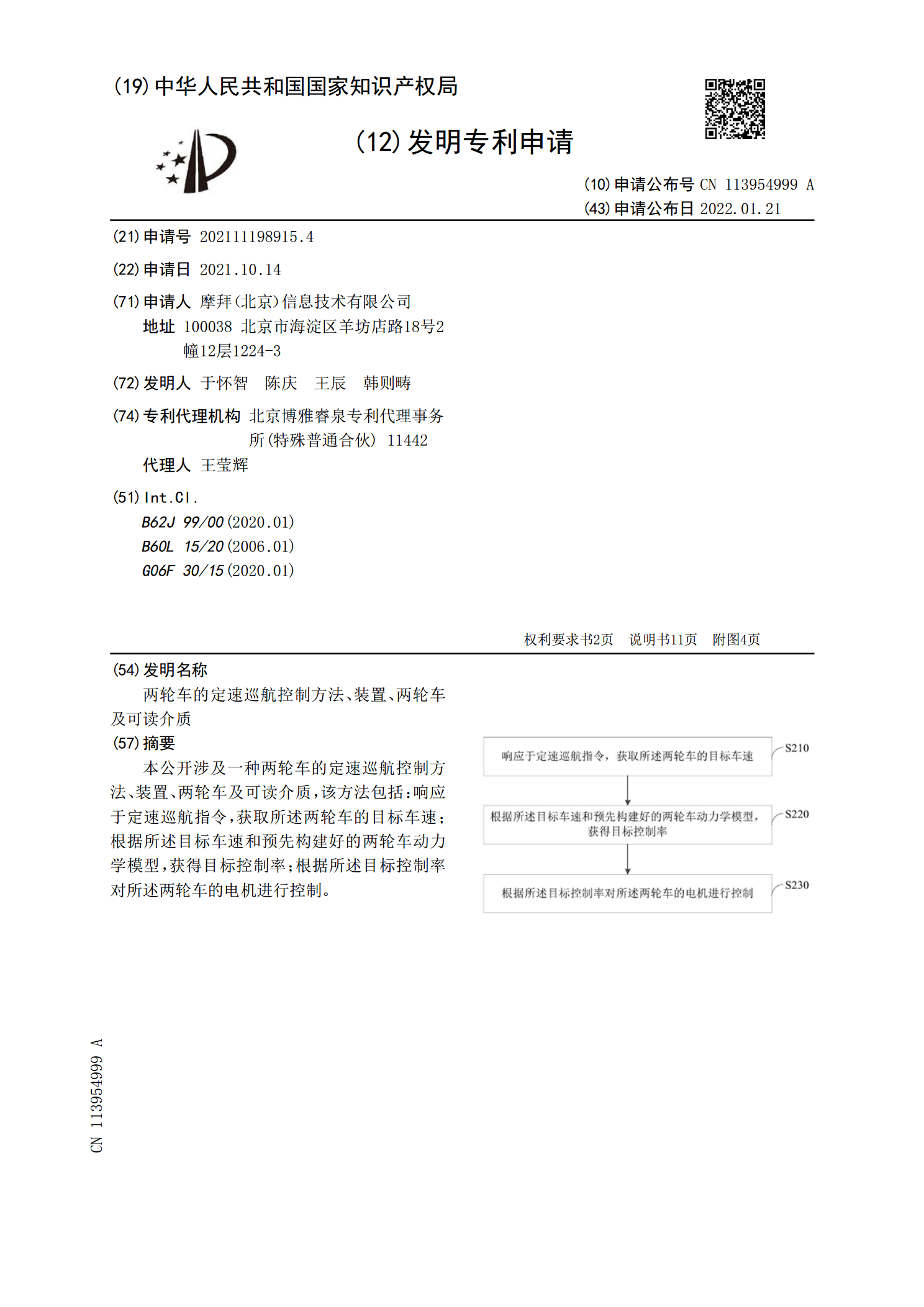
本公开涉及一种两轮车的定速巡航控制方法、装置、两轮车及可读介质,该方法包括:响应于定速巡航指令,获取所述两轮车的目标车速;根据所述目标车速和预先构建好的两轮车动力学模型,获得目标控制率;根据所述目标控制率对所述两轮车的电机进行控制。

一种两轮平衡车的状态检测方法和系统.pdf
本发明公开了一种两轮平衡车的状态检测方法和系统,包括以下步骤:S1,开机后,实时检测两轮平衡车踏板输出的压力;S2,判断压力是否出现向上跳变;S3,若压力的跳变变化大于预设半载阈值,则进入半载状态;若压力的跳变变化量大于预设的全载阈值,则进入全载状态,在进入半载状态的时候,记录压力跳变前一刻的压力值,并以此为压力零点。本发明根据踏板的压力变化对两轮平衡车的状态进行判断,使得上车和下车更加方便,有效提高新手驾驶的安全性。

两轮平衡车的控制方法.pdf
本发明提供一种两轮平衡车的控制方法,包括步骤:S1:控制器、定时器和传感器进入初始化;S2:传感器将采集的信号发送至控制器;S3:控制器处理采集的信号,得到车体当前的俯仰角度???????????????????????????????????????????????