
一种轮履变结构移动机器人的行走机构.pdf

书錦****by

1/8
2/8
3/8
4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轮履变结构移动机器人的行走机构.pdf
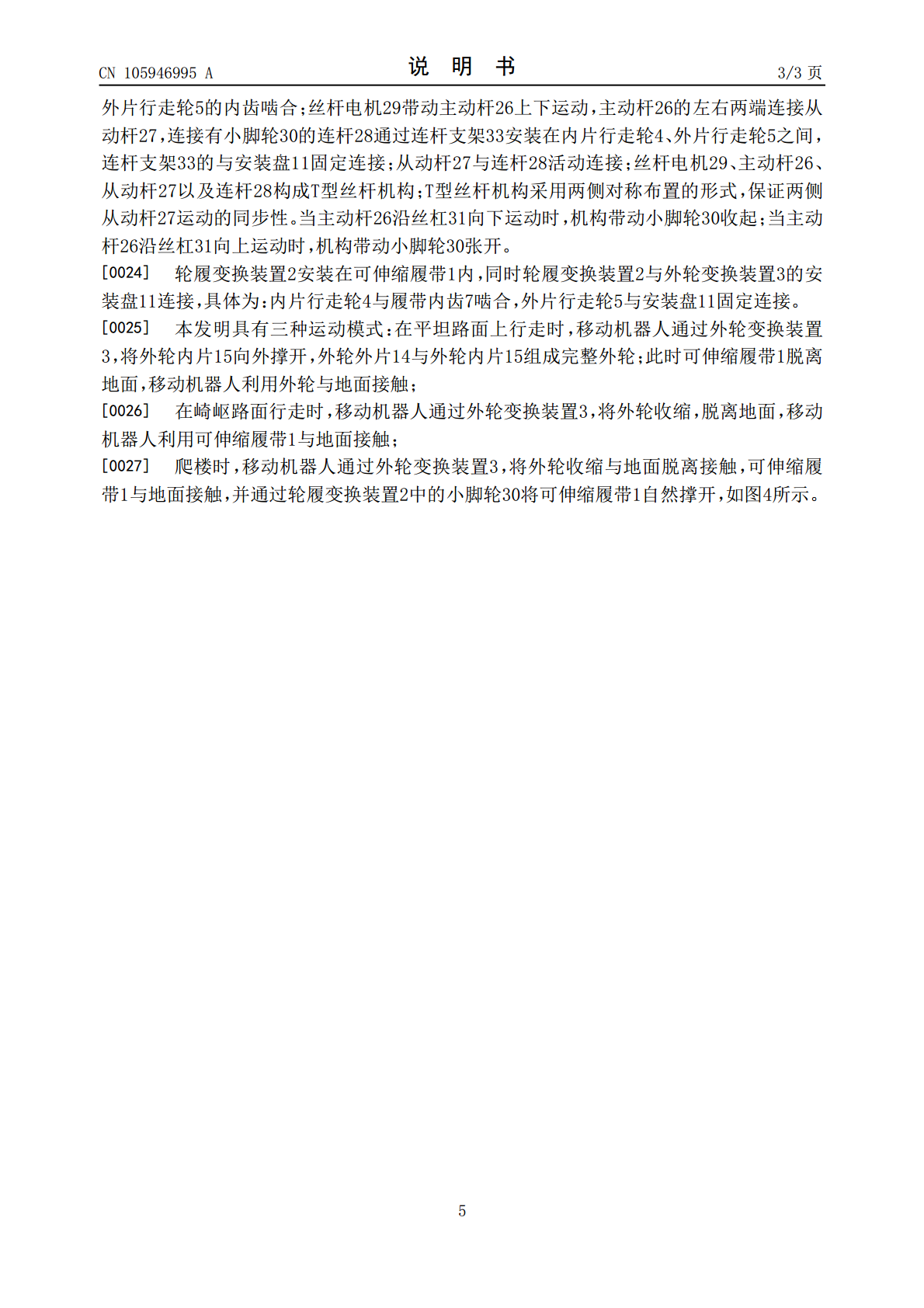
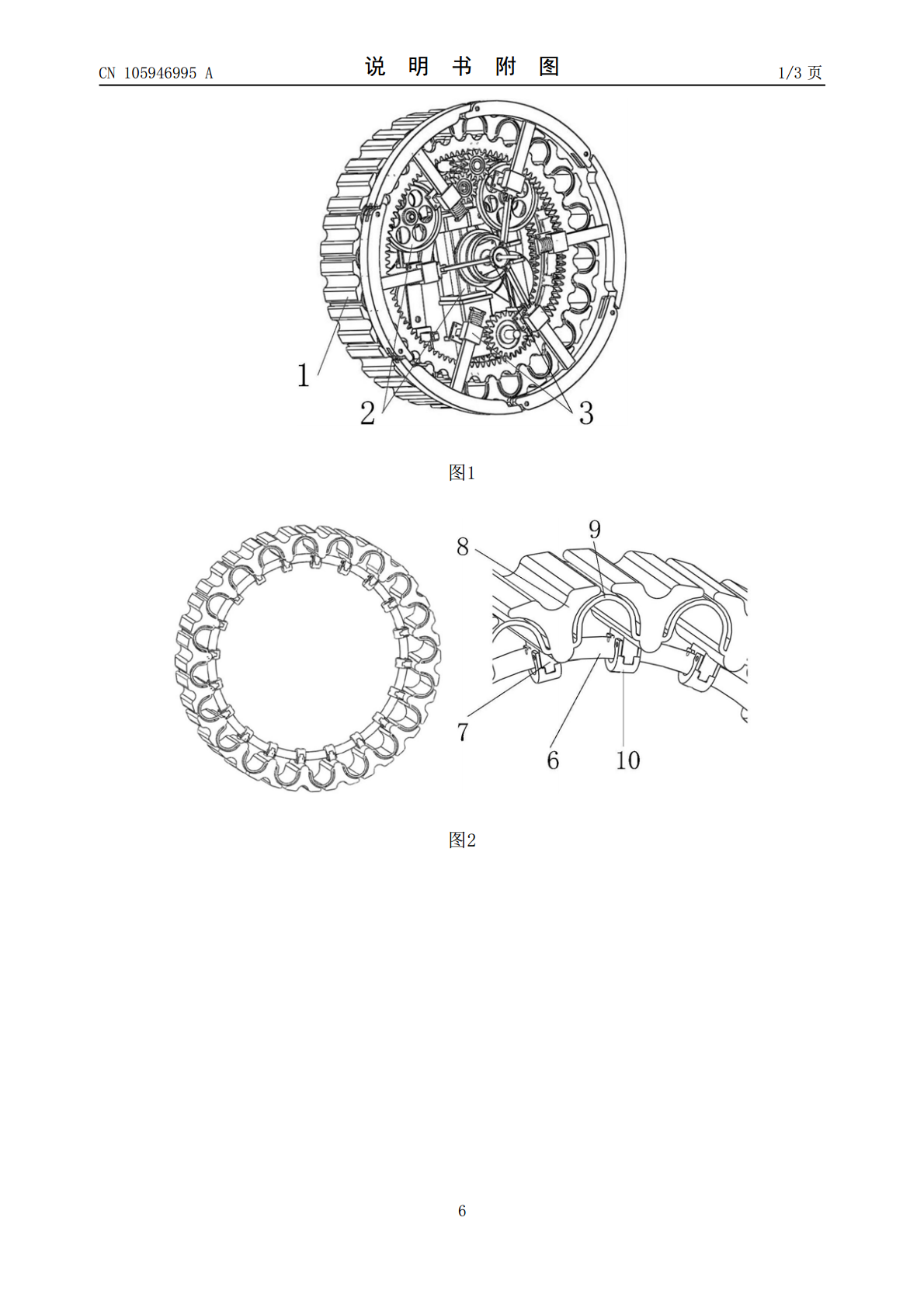
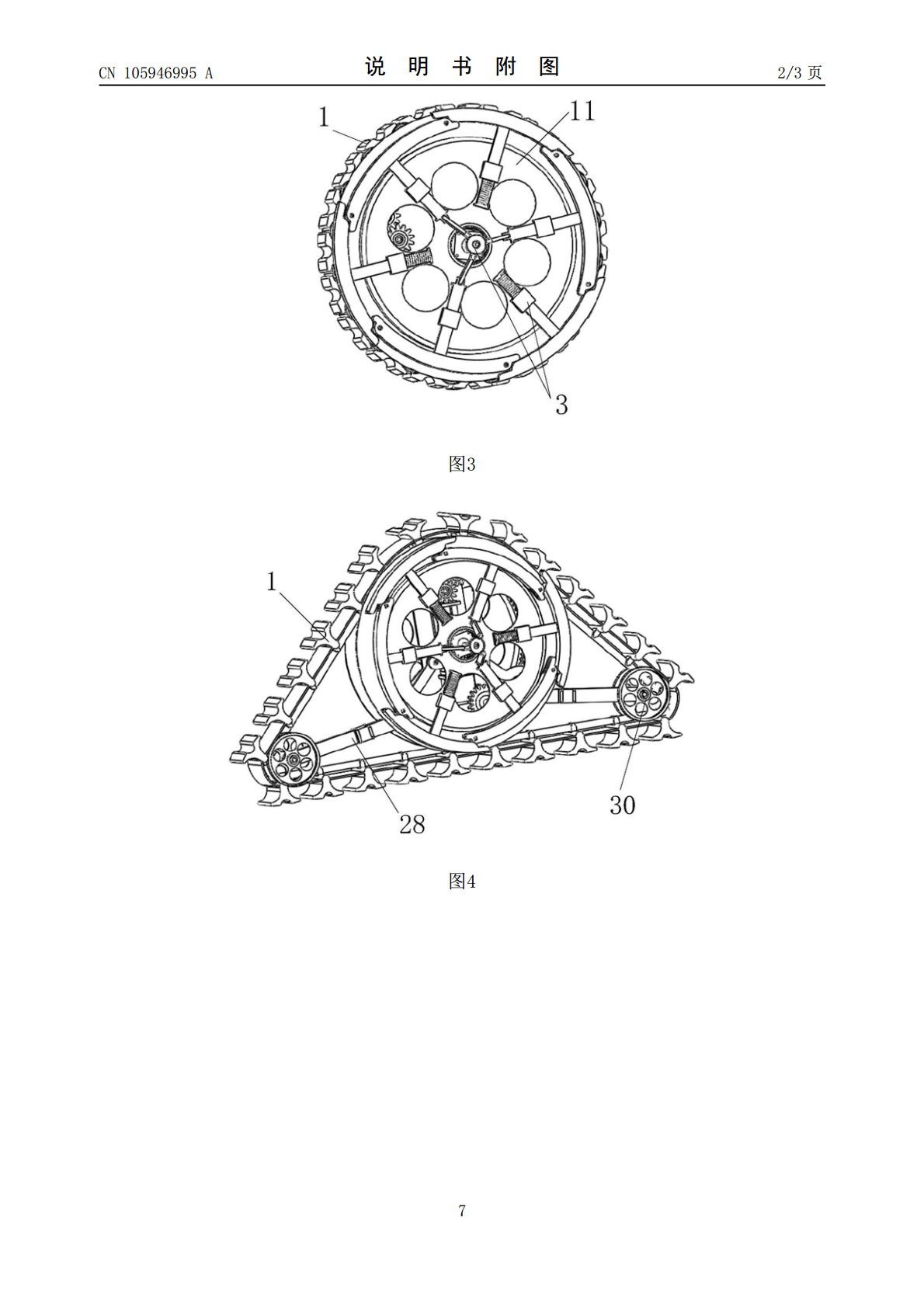
本发明属于移动机器人技术领域,特别涉及一种移动机器人的行走机构。一种轮履变结构移动机器人的行走机构,它包括:可伸缩履带、轮履变换装置以及外轮变换装置;在平坦路面上行走时,移动机器人通过外轮变换装置,将外轮撑开,此时可伸缩履带脱离地面,外轮与地面接触;在崎岖路面行走时,移动机器人通过外轮变换装置,将外轮收缩,与地面脱离接触,可伸缩履带与地面接触;爬楼时,移动机器人通过外轮变换装置,将外轮收缩,与地面脱离接触,可伸缩履带与地面接触,并通过轮履变换装置将可伸缩履带自然撑开。本发明适应不同的路况,减少电机的功耗,

一种用于轮履变结构移动机器人的四连杆轮履变换机构.pdf
本发明提供一种用于轮履变结构移动机器人的四连杆轮履变换机构,包括两套相同的四连杆机构、两套小脚轮组件、蜗轮蜗杆电机、齿轮传动和驱动轴,每套四连杆机构驱动一套小脚轮组件。由于两套四连杆机构完全相同,设计时,只需设计出其中一套四连杆机构结构,然后再确定两套四连杆机构中原动杆之间的夹角,极大简化了四连杆式轮履变换机构的设计过程。同时本发明小脚轮组件中的两个小脚轮能够伸缩,可以灵活地调整小脚轮与履带的接触点位置,从而可适用于多种不同形式的履带,或随着履带的周边磨损及时调整接触点的位置。

小型轮履变结构移动机器人设计及越障分析.docx
小型轮履变结构移动机器人设计及越障分析小型轮履变结构移动机器人设计及越障分析摘要:本文设计了一种小型轮履变结构移动机器人,并且进行了越障分析。该机器人采用轮履变结构,可以实现更灵活的机动性,适应更复杂的环境。文中首先介绍了机器人的总体结构,包括底盘、轮履、传动系统、控制系统等模块。然后详细介绍了机器人的越障分析方法,包括传感器检测、障碍判断、路径规划等步骤。最后,对机器人进行了实验,验证了设计的有效性和越障分析算法的可行性。关键词:小型轮履变结构移动机器人,越障分析,路径规划,传感器检测一、引言移动机器人

一种用于轮履变结构移动机器人的可伸缩履带及行走轮定位机构.pdf
本发明公开一种用于轮履变结构移动机器人的可伸缩履带及行走轮定位机构。机构主要由可伸缩履带、内片行走轮、外片行走轮、行走驱动轴、内片行走轮定位装置、外片行走轮定位装置等组成。可伸缩履带采用带宽相同、齿数不同的两条单面同步带同心耦合而成,内带同步齿与行走轮的外齿啮合传递动力,外带同步齿在机器人移动时与地面接触;两片行走轮的内外均加工有齿,其内齿与行走驱动轴啮合,外齿与履带的内带同步齿啮合;内片行走轮的定位装置由≥3个的基本定位单元圆周阵列而成,基本定位单元主要包括一个大的圆柱滚子轴承及与其正交的两个小的深沟球
一种全地形轮履复合式行走机构.pdf
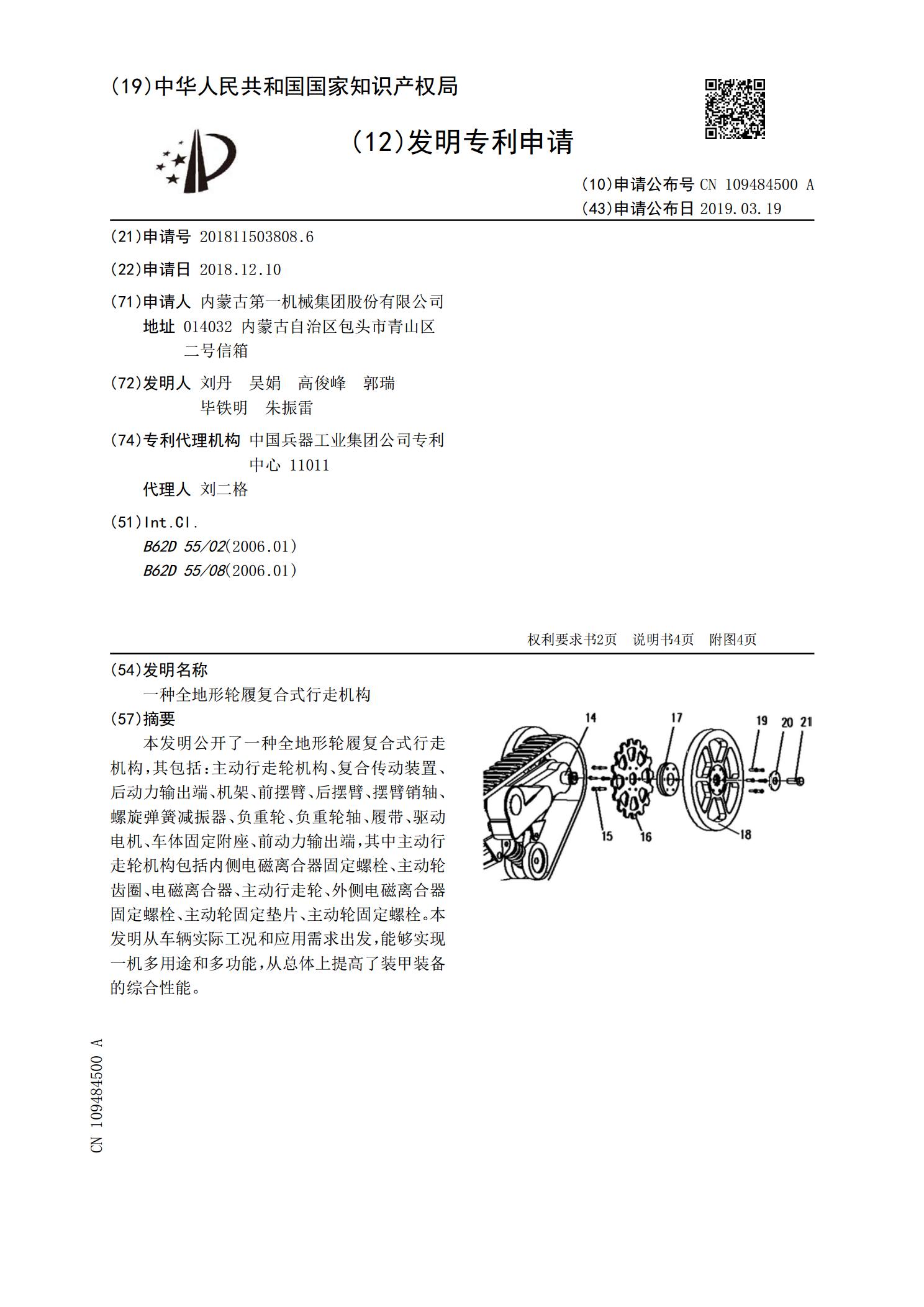
本发明公开了一种全地形轮履复合式行走机构,其包括:主动行走轮机构、复合传动装置、后动力输出端、机架、前摆臂、后摆臂、摆臂销轴、螺旋弹簧减振器、负重轮、负重轮轴、履带、驱动电机、车体固定附座、前动力输出端,其中主动行走轮机构包括内侧电磁离合器固定螺栓、主动轮齿圈、电磁离合器、主动行走轮、外侧电磁离合器固定螺栓、主动轮固定垫片、主动轮固定螺栓。本发明从车辆实际工况和应用需求出发,能够实现一机多用途和多功能,从总体上提高了装甲装备的综合性能。