
基于空间网格的机器人工作点位姿标定方法.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于空间网格的机器人工作点位姿标定方法.docx
基于空间网格的机器人工作点位姿标定方法摘要在机器人控制领域中,机器人的姿态标定是十分重要的一个环节。机器人姿态标定的目的在于确定机器人的位置,使机器人在操作时能够准确地和想要的物体进行交互。本文介绍了一种基于空间网格的机器人工作点位姿标定方法。该方法采用了点云扫描技术和空间网格划分算法,将机器人的工作空间划分成一系列小的网格。通过对每个网格中的点云数据进行处理,得到了机器人的位置和姿态,从而实现了机器人的姿态标定。本文还对该方法的实验结果进行了分析,证明了该方法的可行性和有效性。关键词:机器人控制;姿态标

基于机器人的对接位姿视觉测量系统标定研究.pptx
添加副标题目录PART01PART02机器人对接位姿测量系统的定义和作用机器人对接位姿测量系统的组成和原理机器人对接位姿测量系统的应用场景和优势PART03标定技术的基本概念和原理常见的视觉测量系统标定方法标定技术在机器人对接位姿测量系统中的应用和重要性PART04标定方法的设计和实现标定实验的设计和实施实验结果分析和比较标定方法的优缺点和改进方向PART05标定技术在机器人对接位姿测量系统中的应用实例标定技术的应用效果和评估方法标定技术在机器人对接位姿测量系统中的未来发展方向和挑战PART06研究成果总

基于机器视觉的工业机器人位姿误差的标定与补偿方法研究的任务书.docx
基于机器视觉的工业机器人位姿误差的标定与补偿方法研究的任务书一、任务背景在现代工业生产中,工业机器人越来越广泛地应用于自动化加工和物流领域。通过机器人的高速度、高灵活性和高稳定性等特点,可以减少人力成本和物料损失,提高生产效率和产品质量。然而,机器人的运动精度和位姿精度直接影响产品质量和生产效率,特别是在高精度加工领域,如光电、半导体、精密加工等领域,对机器人的位姿要求更为严格。由于工业机器人在运动过程中,受到众多因素的影响,如机器本身的精度、机器人位姿标定误差、环境干扰等,使得机器人的位姿误差无法避免。
一种不同类型机器人位姿标定方法.pdf
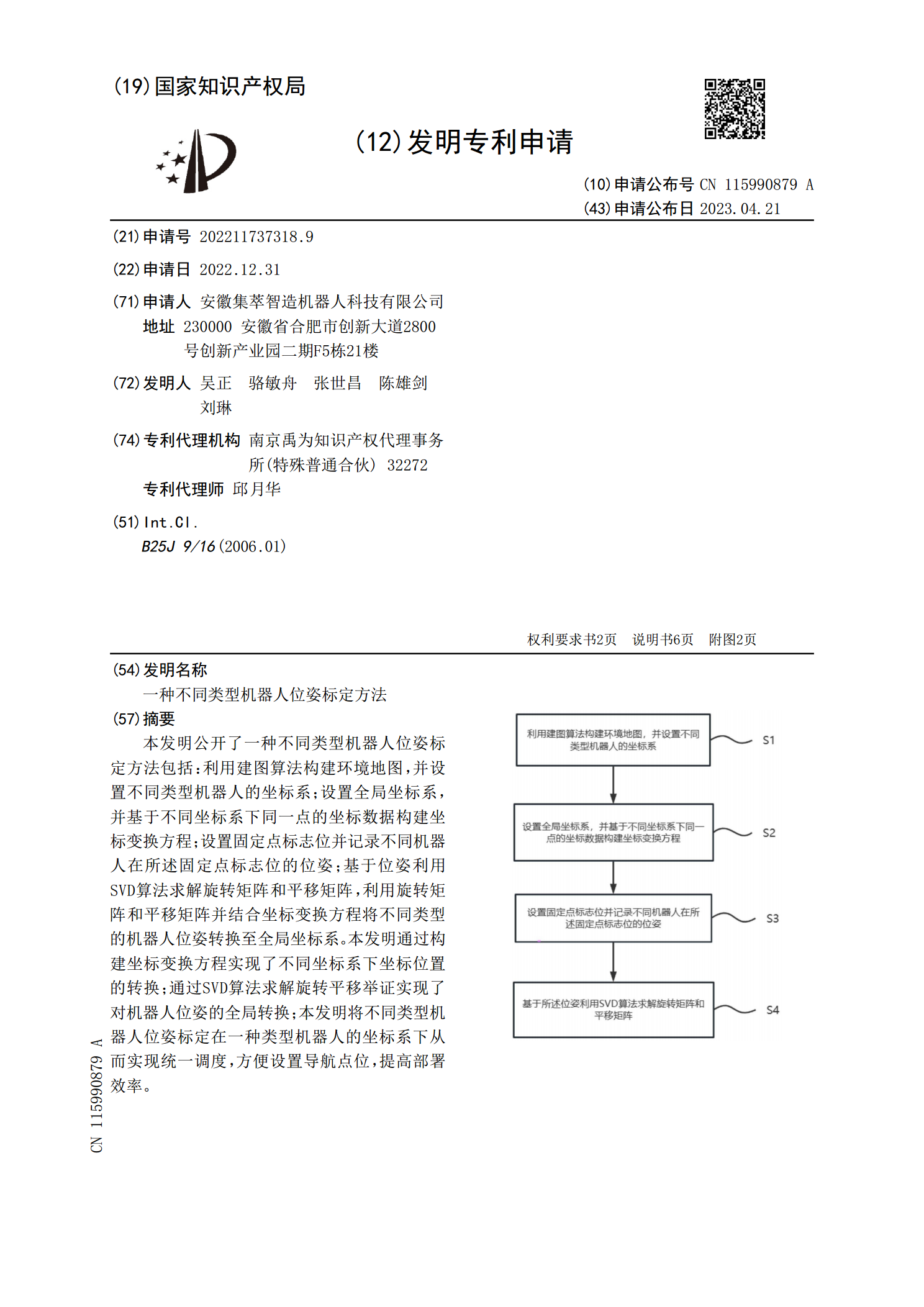
本发明公开了一种不同类型机器人位姿标定方法包括:利用建图算法构建环境地图,并设置不同类型机器人的坐标系;设置全局坐标系,并基于不同坐标系下同一点的坐标数据构建坐标变换方程;设置固定点标志位并记录不同机器人在所述固定点标志位的位姿;基于位姿利用SVD算法求解旋转矩阵和平移矩阵,利用旋转矩阵和平移矩阵并结合坐标变换方程将不同类型的机器人位姿转换至全局坐标系。本发明通过构建坐标变换方程实现了不同坐标系下坐标位置的转换;通过SVD算法求解旋转平移举证实现了对机器人位姿的全局转换;本发明将不同类型机器人位姿标定在一

基于特征点对的位姿估计方法研究.docx
基于特征点对的位姿估计方法研究摘要位姿估计是计算机视觉中的一个重要问题,它涉及到如何确定一个物体在三维空间中的位置和方向。传统的算法需要使用反投影进行目标检测和匹配,然而这种方法耗时且易受噪声和遮挡的影响。相比之下,基于特征点对的位姿估计方法在计算复杂度和鲁棒性方面更具优势。本文将介绍基于特征点对的位姿估计方法的原理、流程和应用。首先,介绍了位姿估计的基本概念和研究背景。其次,介绍了特征点对的概念和特征匹配算法。然后,重点介绍基于特征点对的位姿估计算法,包括最小重投影误差(PnP)算法和迭代最近点算法(I