
一种不同类型机器人位姿标定方法.pdf

志玉****爱啊


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种不同类型机器人位姿标定方法.pdf
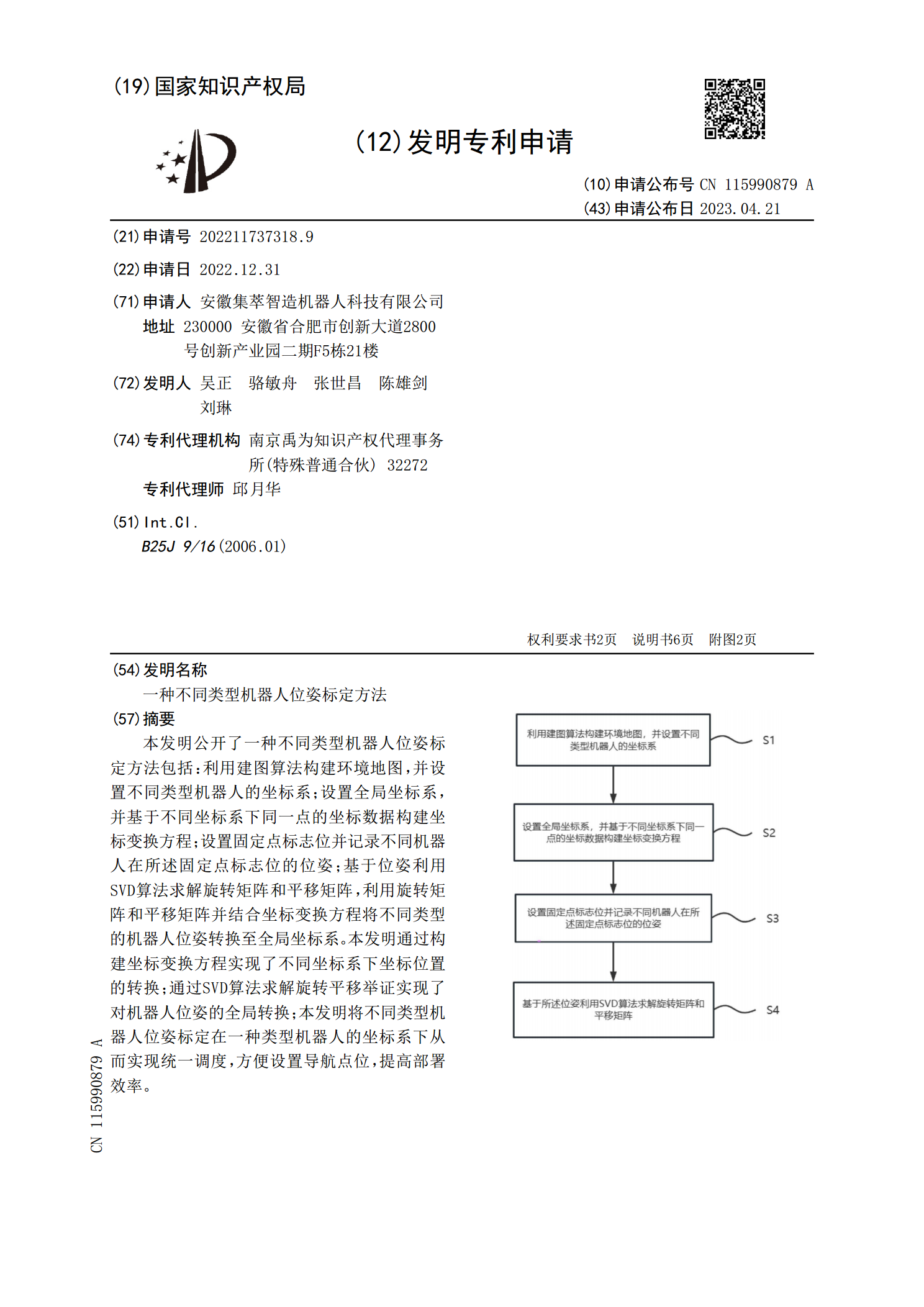
本发明公开了一种不同类型机器人位姿标定方法包括:利用建图算法构建环境地图,并设置不同类型机器人的坐标系;设置全局坐标系,并基于不同坐标系下同一点的坐标数据构建坐标变换方程;设置固定点标志位并记录不同机器人在所述固定点标志位的位姿;基于位姿利用SVD算法求解旋转矩阵和平移矩阵,利用旋转矩阵和平移矩阵并结合坐标变换方程将不同类型的机器人位姿转换至全局坐标系。本发明通过构建坐标变换方程实现了不同坐标系下坐标位置的转换;通过SVD算法求解旋转平移举证实现了对机器人位姿的全局转换;本发明将不同类型机器人位姿标定在一

基于空间网格的机器人工作点位姿标定方法.docx
基于空间网格的机器人工作点位姿标定方法摘要在机器人控制领域中,机器人的姿态标定是十分重要的一个环节。机器人姿态标定的目的在于确定机器人的位置,使机器人在操作时能够准确地和想要的物体进行交互。本文介绍了一种基于空间网格的机器人工作点位姿标定方法。该方法采用了点云扫描技术和空间网格划分算法,将机器人的工作空间划分成一系列小的网格。通过对每个网格中的点云数据进行处理,得到了机器人的位置和姿态,从而实现了机器人的姿态标定。本文还对该方法的实验结果进行了分析,证明了该方法的可行性和有效性。关键词:机器人控制;姿态标

一种位姿自适应机器人的焊接系统及位姿调整方法.pdf
本发明提供了一种位姿自适应机器人的焊接系统及位姿调整方法,所述焊接系统包括焊接机器人、与所述焊接机器人通讯连接的主控机以及与所述主控机通讯连接的检测跟踪系统,所述检测跟踪系统包括设于焊枪上的用以检测焊缝的轮廓的线激光传感器以及设于焊枪上且位于焊枪的相对两侧的两个点激光传感器;所述主控机根据两个点激光传感器以及线激光传感器测得的数据得到所述焊接机器人的标准位姿并根据该标准位姿调整所述焊接机器人的位姿,从而在焊接进程中不断修正焊接机器人的位姿,使焊接机器人一直处于标准位姿下对工件进行焊接,能够适应焊接变形较大
一种关节置换手术位姿标定方法及装置.pdf
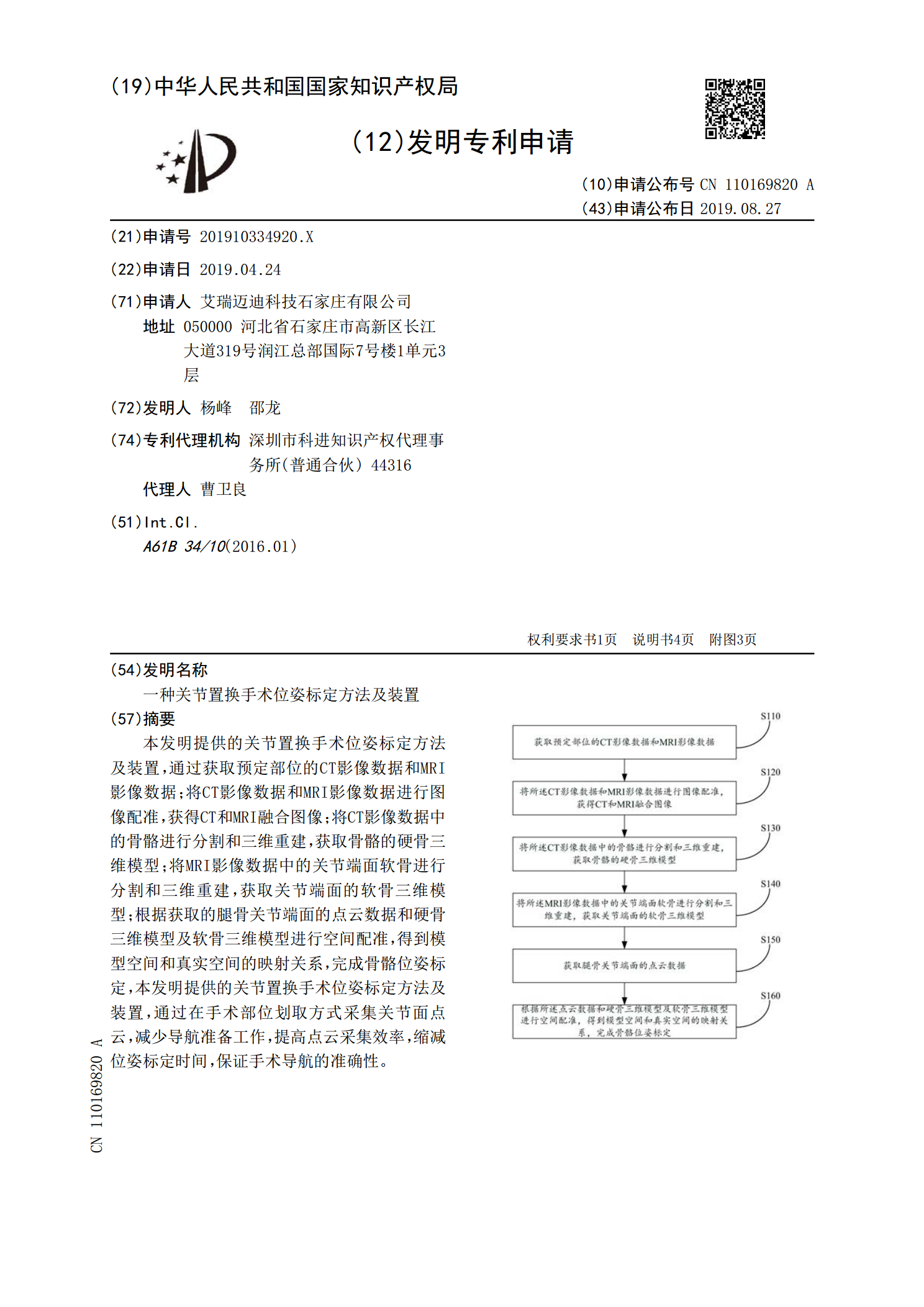
本发明提供的关节置换手术位姿标定方法及装置,通过获取预定部位的CT影像数据和MRI影像数据;将CT影像数据和MRI影像数据进行图像配准,获得CT和MRI融合图像;将CT影像数据中的骨骼进行分割和三维重建,获取骨骼的硬骨三维模型;将MRI影像数据中的关节端面软骨进行分割和三维重建,获取关节端面的软骨三维模型;根据获取的腿骨关节端面的点云数据和硬骨三维模型及软骨三维模型进行空间配准,得到模型空间和真实空间的映射关系,完成骨骼位姿标定,本发明提供的关节置换手术位姿标定方法及装置,通过在手术部位划取方式采集关节面
一种爬行机器人运动参数标定及调姿方法.pdf
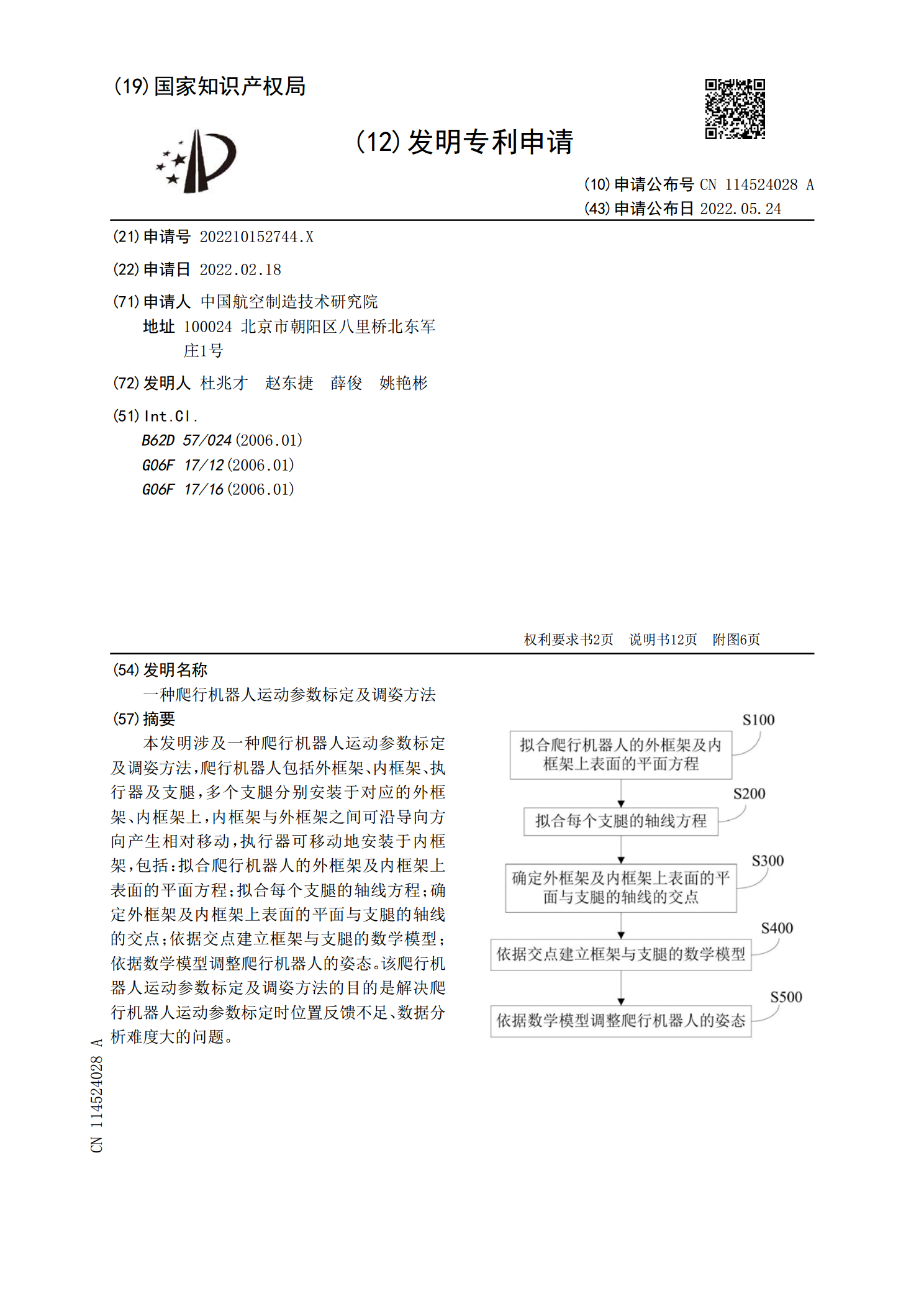
本发明涉及一种爬行机器人运动参数标定及调姿方法,爬行机器人包括外框架、内框架、执行器及支腿,多个支腿分别安装于对应的外框架、内框架上,内框架与外框架之间可沿导向方向产生相对移动,执行器可移动地安装于内框架,包括:拟合爬行机器人的外框架及内框架上表面的平面方程;拟合每个支腿的轴线方程;确定外框架及内框架上表面的平面与支腿的轴线的交点;依据交点建立框架与支腿的数学模型;依据数学模型调整爬行机器人的姿态。该爬行机器人运动参数标定及调姿方法的目的是解决爬行机器人运动参数标定时位置反馈不足、数据分析难度大的问题。