
基于运动预测的车辆横向稳定性控制.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于运动预测的车辆横向稳定性控制.docx
基于运动预测的车辆横向稳定性控制基于运动预测的车辆横向稳定性控制摘要:随着自动驾驶技术的不断发展,车辆横向稳定性控制成为了自动驾驶领域一个重要的研究方向。本文提出了一种基于运动预测的车辆横向稳定性控制方法,该方法通过对车辆的运动进行预测,提前采取相应的控制策略来保持车辆的横向稳定性。通过实验验证,本文方法可以有效地提高车辆的横向稳定性,为自动驾驶技术的发展提供了一种新的思路。1.引言随着汽车工业的发展和人们对驾驶安全性的要求不断提高,车辆横向稳定性控制成为了汽车制造业和自动驾驶技术研究的热点问题之一。车辆
车辆横向运动控制.pdf
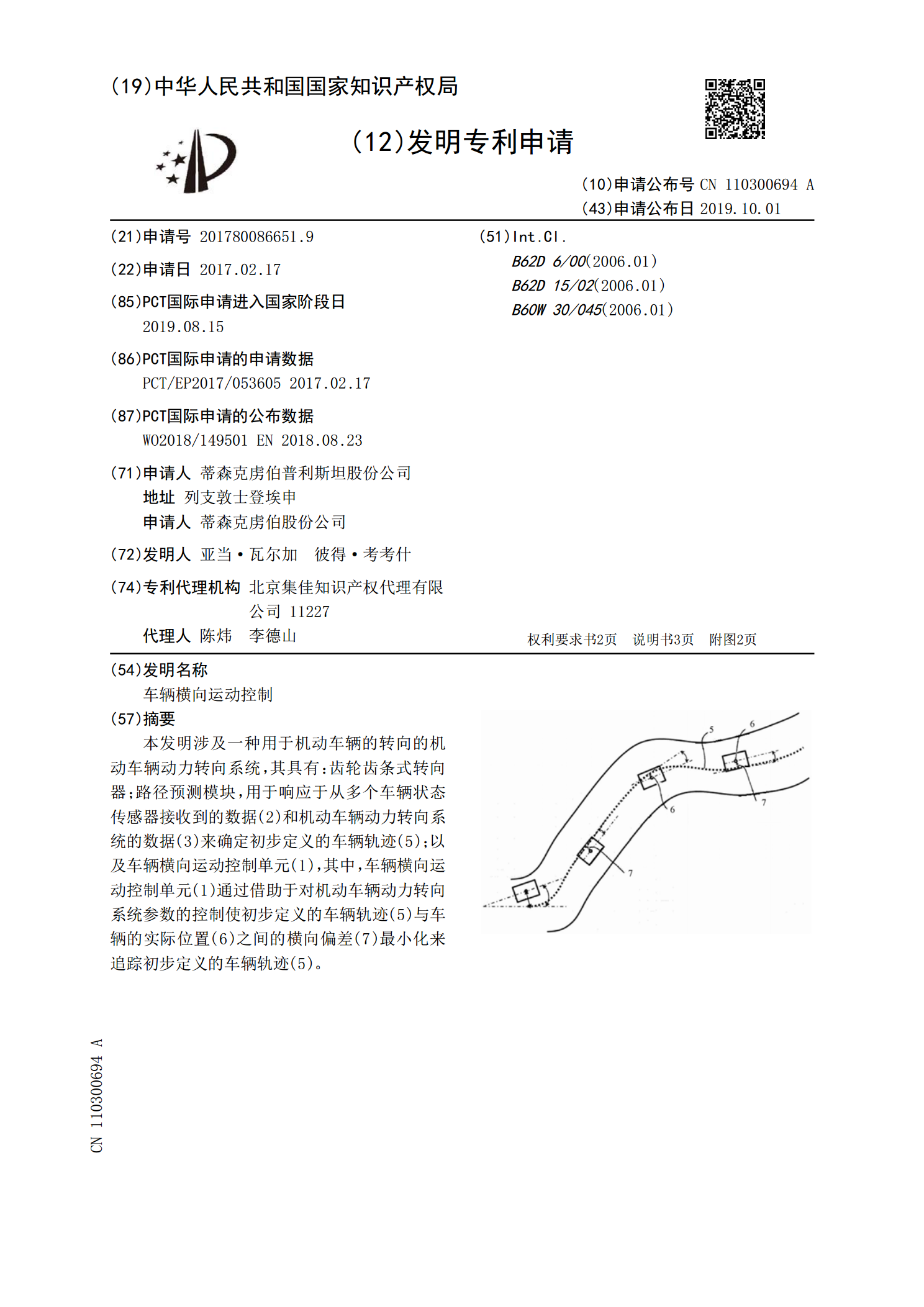
本发明涉及一种用于机动车辆的转向的机动车辆动力转向系统,其具有:齿轮齿条式转向器;路径预测模块,用于响应于从多个车辆状态传感器接收到的数据(2)和机动车辆动力转向系统的数据(3)来确定初步定义的车辆轨迹(5);以及车辆横向运动控制单元(1),其中,车辆横向运动控制单元(1)通过借助于对机动车辆动力转向系统参数的控制使初步定义的车辆轨迹(5)与车辆的实际位置(6)之间的横向偏差(7)最小化来追踪初步定义的车辆轨迹(5)。

基于横向位移控制4WS车辆操纵稳定性仿真研究.docx
基于横向位移控制4WS车辆操纵稳定性仿真研究摘要为提高车辆的操纵稳定性和行车安全性,本研究基于横向位移控制4WS车辆进行仿真分析。通过建立4WS车辆动力学模型,设计横向位移控制器,并使用MATLAB/Simulink软件进行仿真。研究结果表明,在横向位移较大的情况下,采用横向位移控制可以有效提高车辆操纵稳定性,降低车辆失控的风险。关键词:4WS车辆;操纵稳定性;横向位移控制;仿真分析;MATLAB/SimulinkAbstractInordertoimprovethehandlingstabilityan

车辆系统横向运动稳定性评判的数值仿真研究.docx
车辆系统横向运动稳定性评判的数值仿真研究车辆的横向运动稳定性对于安全和乘坐舒适性至关重要。随着车辆动力学和控制技术的不断发展,数值仿真成为评判车辆横向运动稳定性的重要手段之一。本文旨在探讨车辆系统横向运动稳定性评判的数值仿真研究。引言:车辆的横向运动稳定性是指车辆在行驶过程中不发生横向失控或失稳的能力。横向运动稳定性评判对于提高车辆的安全性、操控性和乘坐舒适性非常重要。传统的评判方法通常采用试验、数据分析和经验总结等手段,而数值仿真技术的发展为评判车辆横向运动稳定性提供了一种全新的途径。横向运动稳定性评判

基于EPSESP的汽车横向运动稳定性及其混沌控制研究的开题报告.docx
基于EPSESP的汽车横向运动稳定性及其混沌控制研究的开题报告题目:基于EPSESP的汽车横向运动稳定性及其混沌控制研究研究背景与意义:随着汽车科技的不断进步,人们对汽车安全性能的要求也日益提高。汽车的横向运动稳定性是其安全性能中非常重要的一部分,它直接关系到驾驶员在高速行驶时的行车安全。而汽车横向运动稳定性受到多种因素的影响,其中悬挂系统和电子稳定系统是两个主要的因素,二者相互影响,共同决定了汽车的横向运动稳定性。另一方面,混沌控制是一种可以有效控制非线性动态系统的方法,在工业、交通、金融等领域有着广泛