
车辆横向运动控制.pdf

闪闪****魔王

1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
车辆横向运动控制.pdf
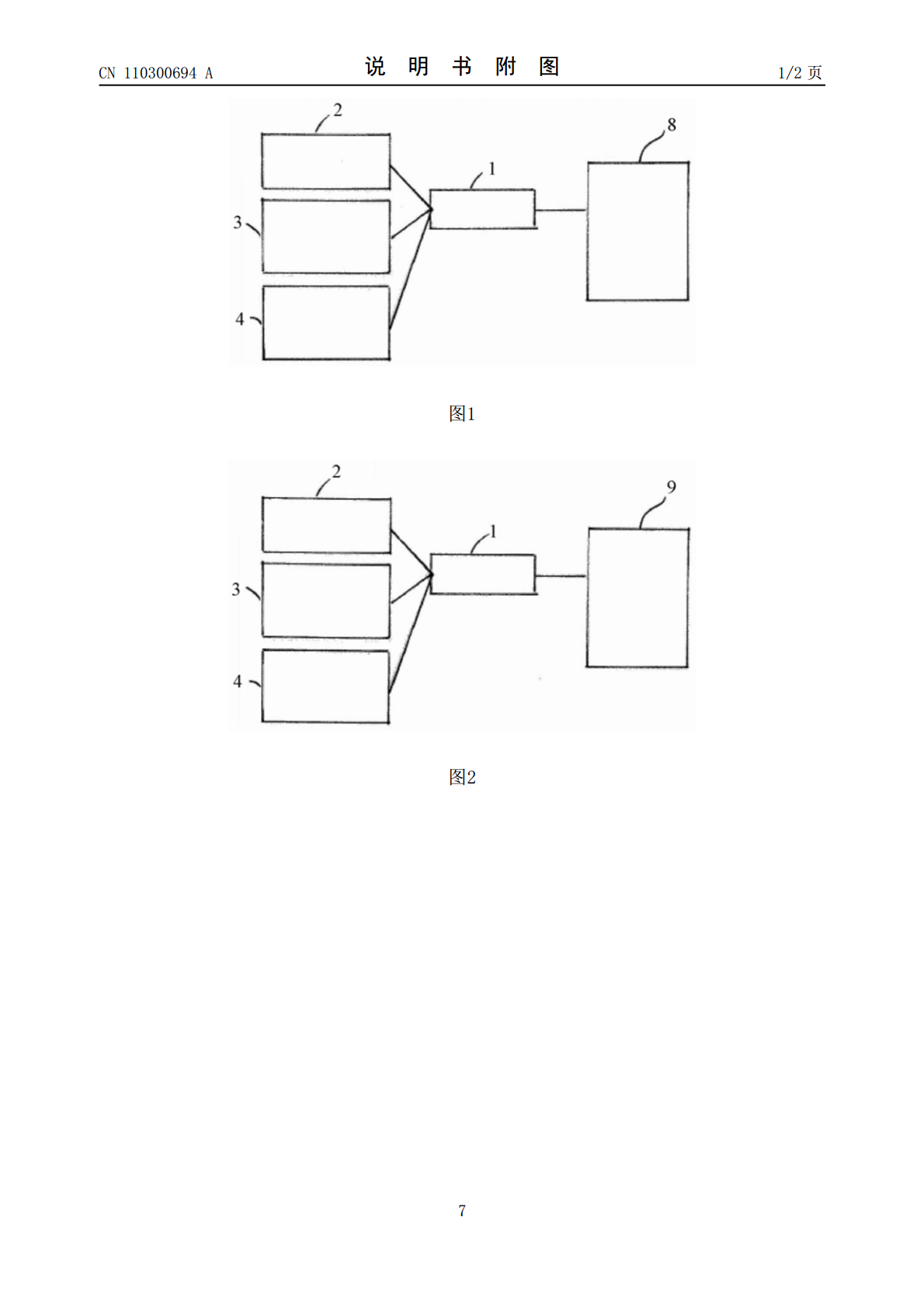
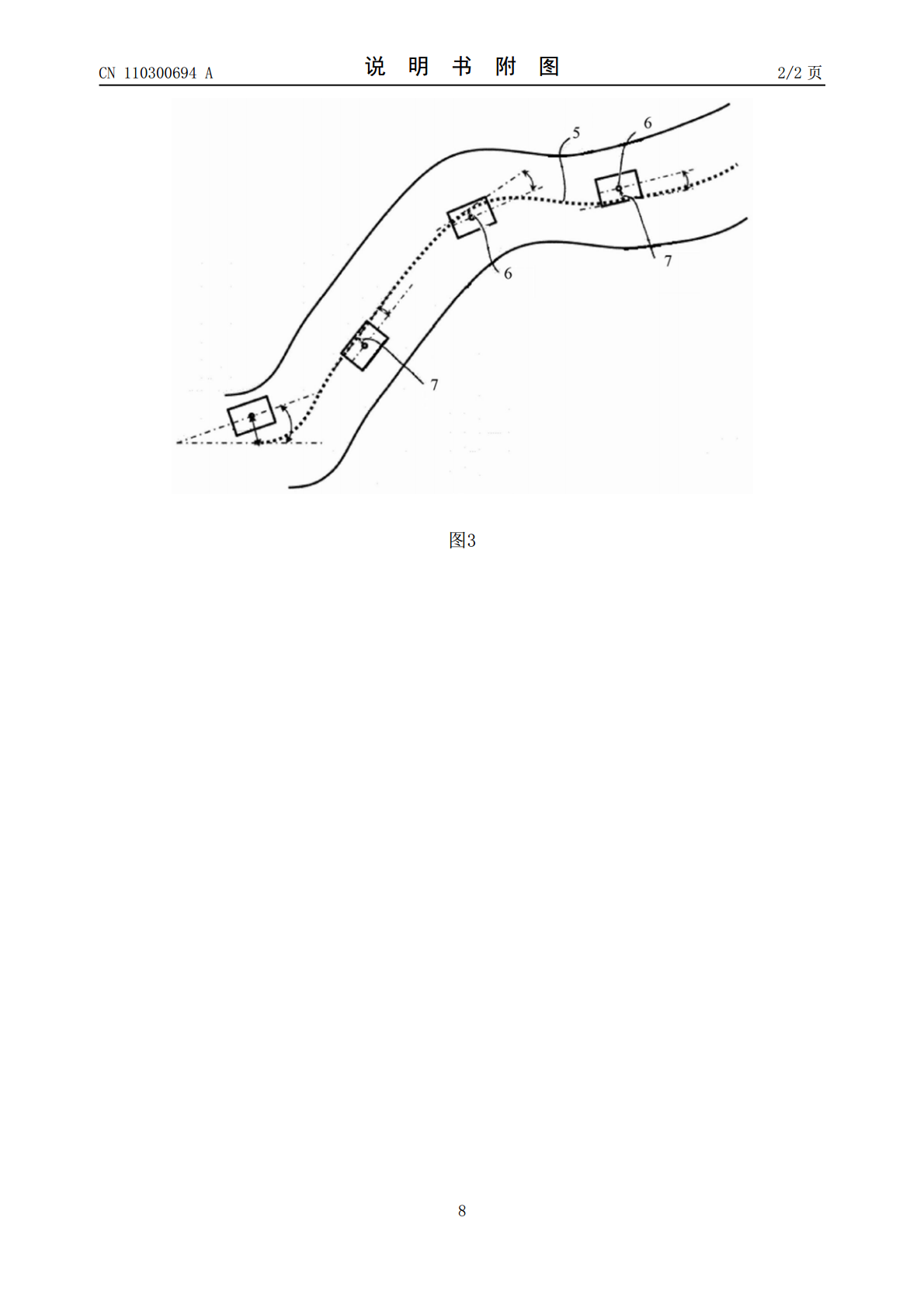
本发明涉及一种用于机动车辆的转向的机动车辆动力转向系统,其具有:齿轮齿条式转向器;路径预测模块,用于响应于从多个车辆状态传感器接收到的数据(2)和机动车辆动力转向系统的数据(3)来确定初步定义的车辆轨迹(5);以及车辆横向运动控制单元(1),其中,车辆横向运动控制单元(1)通过借助于对机动车辆动力转向系统参数的控制使初步定义的车辆轨迹(5)与车辆的实际位置(6)之间的横向偏差(7)最小化来追踪初步定义的车辆轨迹(5)。

基于运动预测的车辆横向稳定性控制.docx
基于运动预测的车辆横向稳定性控制基于运动预测的车辆横向稳定性控制摘要:随着自动驾驶技术的不断发展,车辆横向稳定性控制成为了自动驾驶领域一个重要的研究方向。本文提出了一种基于运动预测的车辆横向稳定性控制方法,该方法通过对车辆的运动进行预测,提前采取相应的控制策略来保持车辆的横向稳定性。通过实验验证,本文方法可以有效地提高车辆的横向稳定性,为自动驾驶技术的发展提供了一种新的思路。1.引言随着汽车工业的发展和人们对驾驶安全性的要求不断提高,车辆横向稳定性控制成为了汽车制造业和自动驾驶技术研究的热点问题之一。车辆
车辆横向控制方法和装置、介质、设备、车辆.pdf
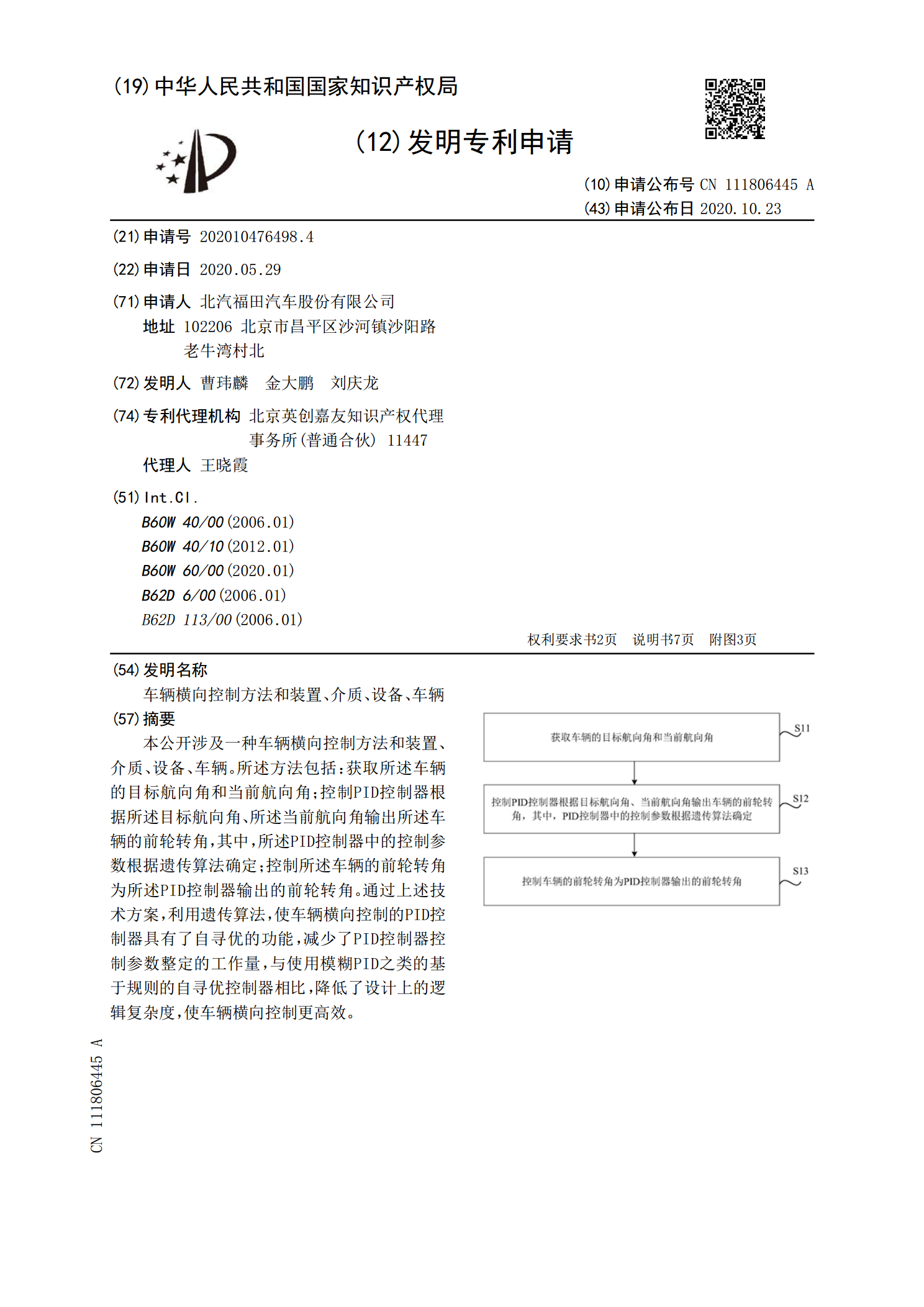
本公开涉及一种车辆横向控制方法和装置、介质、设备、车辆。所述方法包括:获取所述车辆的目标航向角和当前航向角;控制PID控制器根据所述目标航向角、所述当前航向角输出所述车辆的前轮转角,其中,所述PID控制器中的控制参数根据遗传算法确定;控制所述车辆的前轮转角为所述PID控制器输出的前轮转角。通过上述技术方案,利用遗传算法,使车辆横向控制的PID控制器具有了自寻优的功能,减少了PID控制器控制参数整定的工作量,与使用模糊PID之类的基于规则的自寻优控制器相比,降低了设计上的逻辑复杂度,使车辆横向控制更高效。
车辆横向控制方法和装置、介质、设备、车辆.pdf
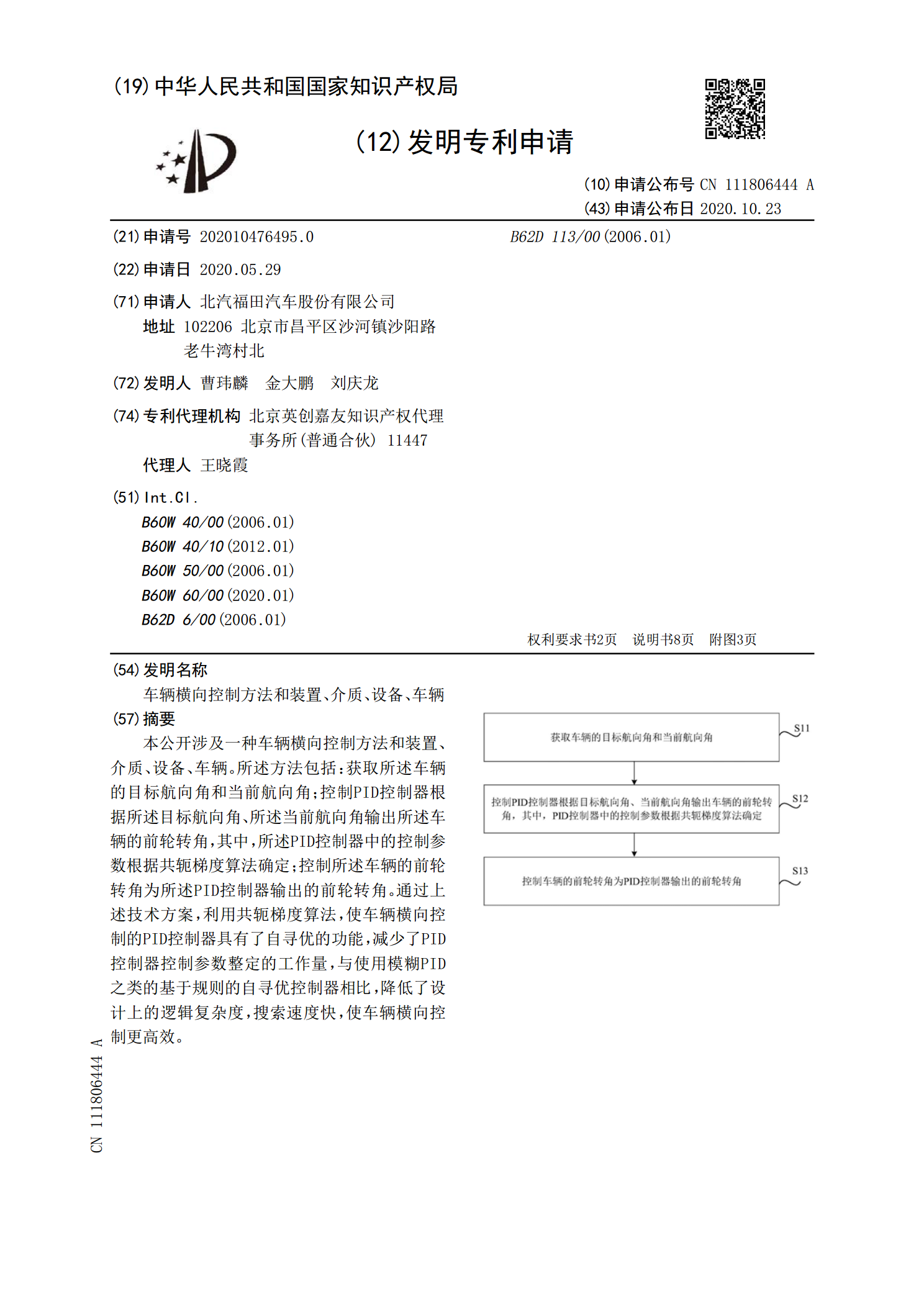
本公开涉及一种车辆横向控制方法和装置、介质、设备、车辆。所述方法包括:获取所述车辆的目标航向角和当前航向角;控制PID控制器根据所述目标航向角、所述当前航向角输出所述车辆的前轮转角,其中,所述PID控制器中的控制参数根据共轭梯度算法确定;控制所述车辆的前轮转角为所述PID控制器输出的前轮转角。通过上述技术方案,利用共轭梯度算法,使车辆横向控制的PID控制器具有了自寻优的功能,减少了PID控制器控制参数整定的工作量,与使用模糊PID之类的基于规则的自寻优控制器相比,降低了设计上的逻辑复杂度,搜索速度快,使车

智能车辆局部避障路径规划及横向运动控制研究的任务书.docx
智能车辆局部避障路径规划及横向运动控制研究的任务书任务书一、任务背景智能车辆是一种新型的交通工具,在未来可能会成为人们出行的主要选择。智能车辆具有无人驾驶、自动控制、智能安全等优点,是未来互联车联网的发展方向之一。局部避障路径规划及横向运动控制是智能车辆中的一个关键技术,对实现智能安全驾驶、提高交通效率、降低交通事故等方面具有重要意义。二、任务目标本研究旨在设计一种智能车辆局部避障路径规划及横向运动控制方案,使智能车辆能够在局部区域内进行安全、稳定的驾驶。具体目标包括:1.设计一种基于雷达和视觉传感器的智