
基于综合识别的高速飞行器自适应控制方法(英文).docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于综合识别的高速飞行器自适应控制方法(英文).docx
基于综合识别的高速飞行器自适应控制方法(英文)BasedonComprehensiveRecognition:AdaptiveControlMethodforHigh-SpeedAircraftAbstractWiththeadventofhigh-speedaviationtechnology,adaptivecontrolhasbecomeincreasinglycrucialforthesafeoperationofhigh-speedaircraft.Inthispaper,weproposean

基于手掌识别的无人飞行器控制方法、控制装置和无人飞行器.pdf
公开了一种基于手掌识别的无人飞行器控制方法、控制装置及其无人飞行器,方法包括以下步骤:无人飞行器采集并存储至少一个授权用户的手掌轮廓外形以及手掌特征,所述手掌特征包括掌纹特征、掌指比和/或手掌佩戴物品的外形,在无人飞行器降落阶段,布置在无人飞行器下方的第一拍摄设备采集手掌图像,当所述第一拍摄设备采集的手掌图像被识别符合手掌特征时,无人飞行器降落在所述手掌。

基于气动参数辨识的变体飞行器自适应控制方法.docx
基于气动参数辨识的变体飞行器自适应控制方法标题:基于气动参数辨识的变体飞行器自适应控制方法摘要:随着无人机技术的发展,变体飞行器作为一种新型的飞行器型号,具有较强的灵活性和适应性。然而,变体飞行器在复杂环境下的自主飞行和控制仍然面临一些挑战。本文提出了一种基于气动参数辨识的自适应控制方法,旨在提高变体飞行器的飞行性能和稳定性。1.引言无人机技术的快速发展为航空领域带来了新的机遇和挑战。其中,变体飞行器作为一种新型的无人机,能够在飞行中自由转换不同的飞行模态,具有灵活多样的动力和机动性能。然而,由于其复杂的

基于神经网络的机动飞行器自适应控制方法.docx
基于神经网络的机动飞行器自适应控制方法基于神经网络的机动飞行器自适应控制方法摘要:随着无人机技术的快速发展,机动飞行器的控制问题成为研究的一个重要方向。本文提出了一种基于神经网络的机动飞行器自适应控制方法。该方法通过使用神经网络模型来建立机动飞行器的动力学模型,并应用自适应控制策略来实现对飞行器的控制。实验结果表明,该方法能够有效地跟踪任意给定轨迹,并在不同环境和敌对干扰下保持飞行器的稳定性和安全性。关键词:无人机,机动飞行器,神经网络,自适应控制1.引言机动飞行器(如无人机)的控制问题是一个具有挑战性的
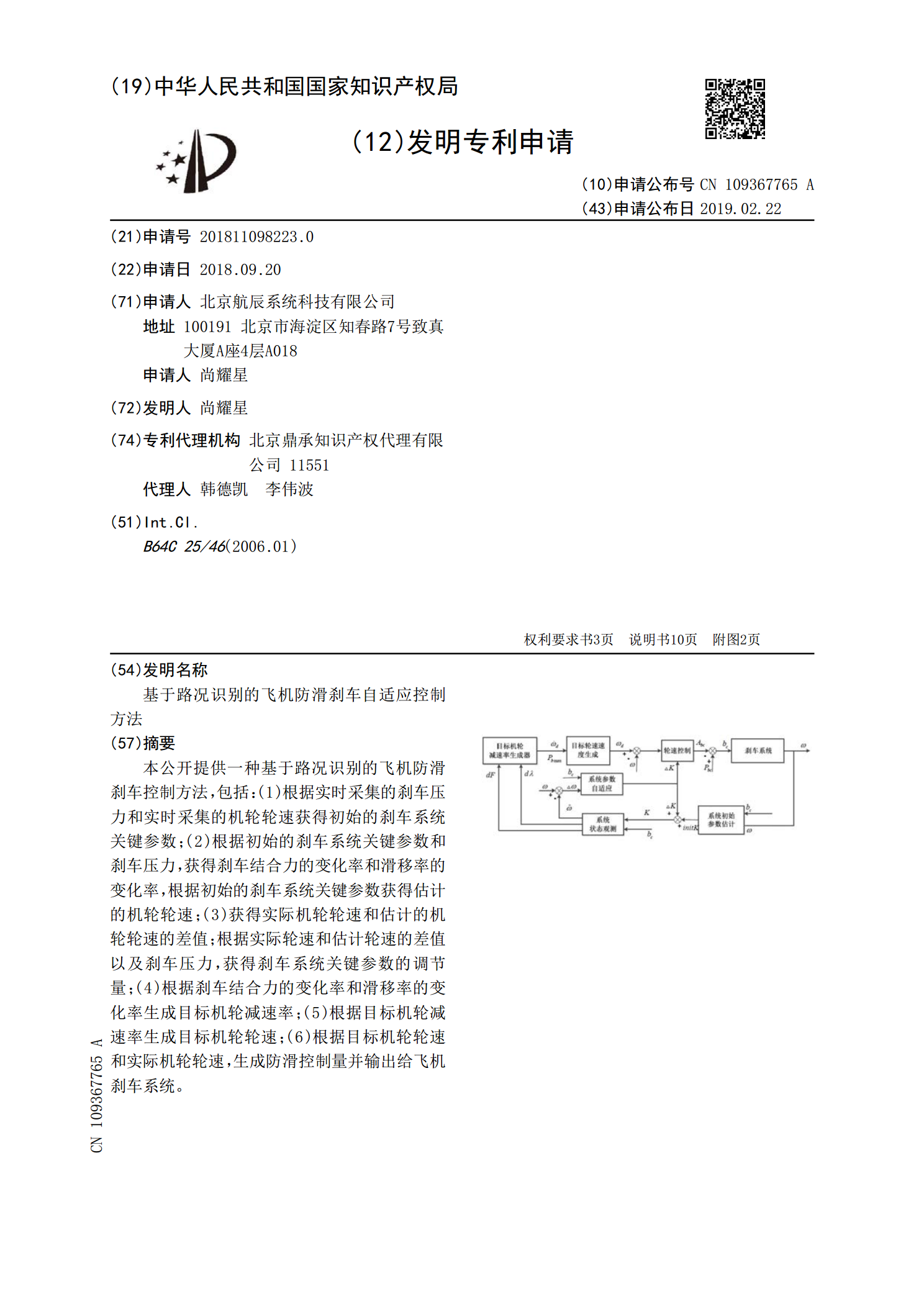
基于路况识别的飞机防滑刹车自适应控制方法.pdf
本公开提供一种基于路况识别的飞机防滑刹车控制方法,包括:(1)根据实时采集的刹车压力和实时采集的机轮轮速获得初始的刹车系统关键参数;(2)根据初始的刹车系统关键参数和刹车压力,获得刹车结合力的变化率和滑移率的变化率,根据初始的刹车系统关键参数获得估计的机轮轮速;(3)获得实际机轮轮速和估计的机轮轮速的差值;根据实际轮速和估计轮速的差值以及刹车压力,获得刹车系统关键参数的调节量;(4)根据刹车结合力的变化率和滑移率的变化率生成目标机轮减速率;(5)根据目标机轮减速率生成目标机轮轮速;(6)根据目标机轮轮速和