
基于手掌识别的无人飞行器控制方法、控制装置和无人飞行器.pdf

子璇****君淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于手掌识别的无人飞行器控制方法、控制装置和无人飞行器.pdf
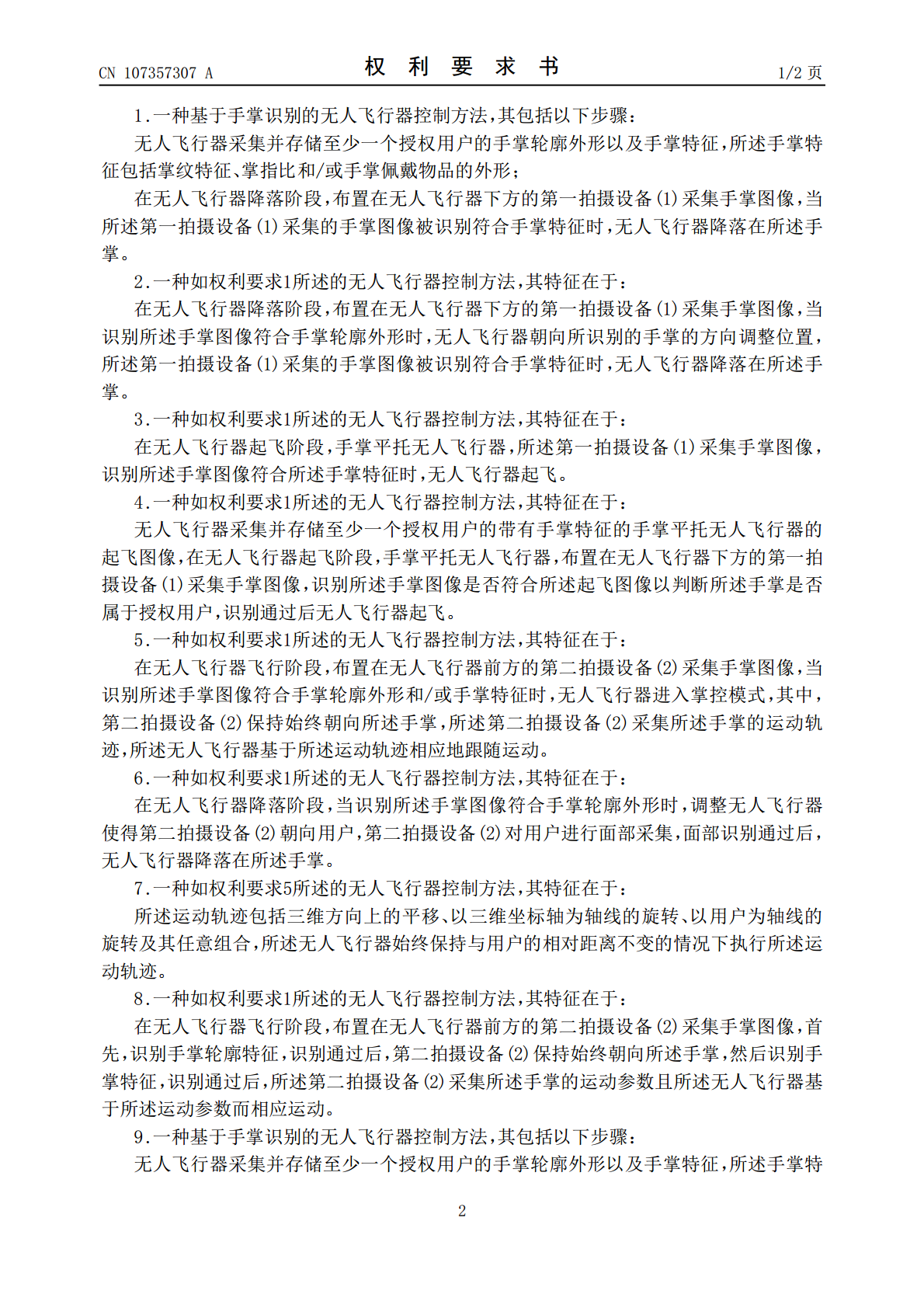
公开了一种基于手掌识别的无人飞行器控制方法、控制装置及其无人飞行器,方法包括以下步骤:无人飞行器采集并存储至少一个授权用户的手掌轮廓外形以及手掌特征,所述手掌特征包括掌纹特征、掌指比和/或手掌佩戴物品的外形,在无人飞行器降落阶段,布置在无人飞行器下方的第一拍摄设备采集手掌图像,当所述第一拍摄设备采集的手掌图像被识别符合手掌特征时,无人飞行器降落在所述手掌。
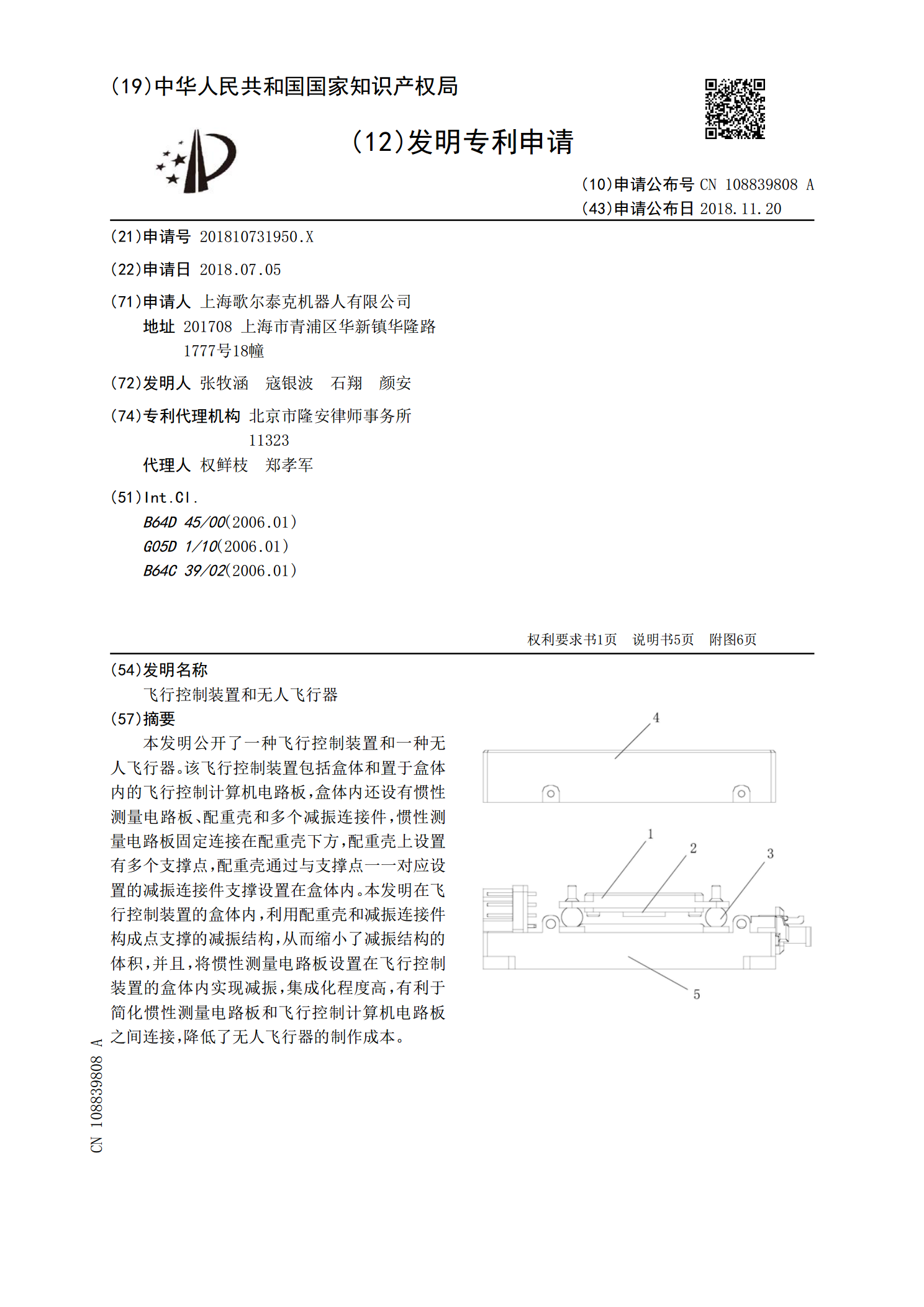
飞行控制装置和无人飞行器.pdf
本发明公开了一种飞行控制装置和一种无人飞行器。该飞行控制装置包括盒体和置于盒体内的飞行控制计算机电路板,盒体内还设有惯性测量电路板、配重壳和多个减振连接件,惯性测量电路板固定连接在配重壳下方,配重壳上设置有多个支撑点,配重壳通过与支撑点一一对应设置的减振连接件支撑设置在盒体内。本发明在飞行控制装置的盒体内,利用配重壳和减振连接件构成点支撑的减振结构,从而缩小了减振结构的体积,并且,将惯性测量电路板设置在飞行控制装置的盒体内实现减振,集成化程度高,有利于简化惯性测量电路板和飞行控制计算机电路板之间连接,降低

无人飞行器控制系统、无人飞行器控制方法、及程序.pdf
本发明确保无人飞行器飞行时的稳定性。无人飞行器控制系统(1)的第1获取设备(101)获取第1信息,该第1信息是用来使飞行中的无人飞行器(10)动作的信息、与无人飞行器(10)的动作的检测结果相关的信息中的至少一个。第2获取设备(102)获取第2信息,用于在无人飞行器(10)的控制切换后,使无人飞行器(10)动作。飞行控制设备(104)基于第1信息及第2信息,对切换为基于第2信息控制无人飞行器(10)进行限制。
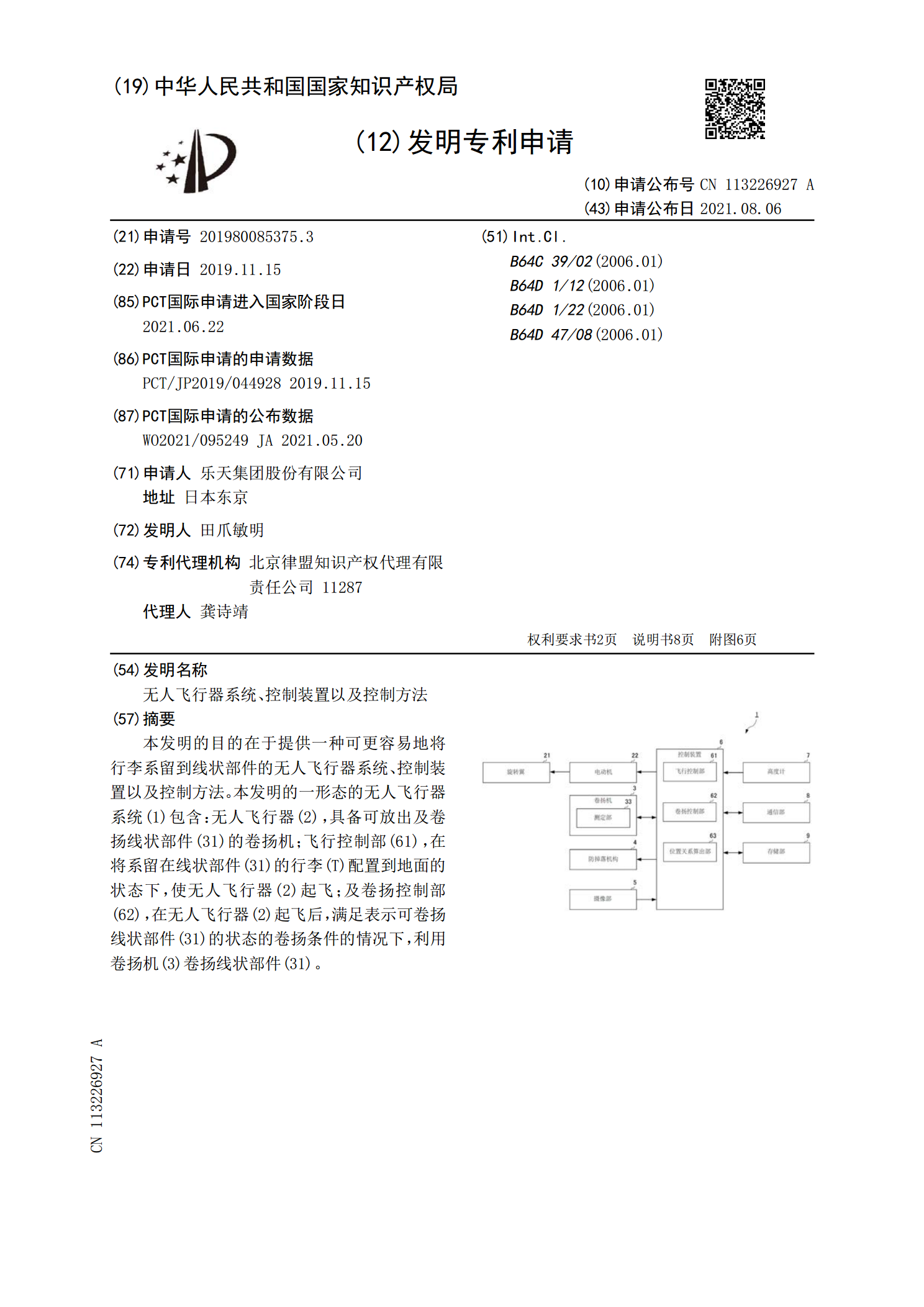
无人飞行器系统、控制装置以及控制方法.pdf
本发明的目的在于提供一种可更容易地将行李系留到线状部件的无人飞行器系统、控制装置以及控制方法。本发明的一形态的无人飞行器系统(1)包含:无人飞行器(2),具备可放出及卷扬线状部件(31)的卷扬机;飞行控制部(61),在将系留在线状部件(31)的行李(T)配置到地面的状态下,使无人飞行器(2)起飞;及卷扬控制部(62),在无人飞行器(2)起飞后,满足表示可卷扬线状部件(31)的状态的卷扬条件的情况下,利用卷扬机(3)卷扬线状部件(31)。
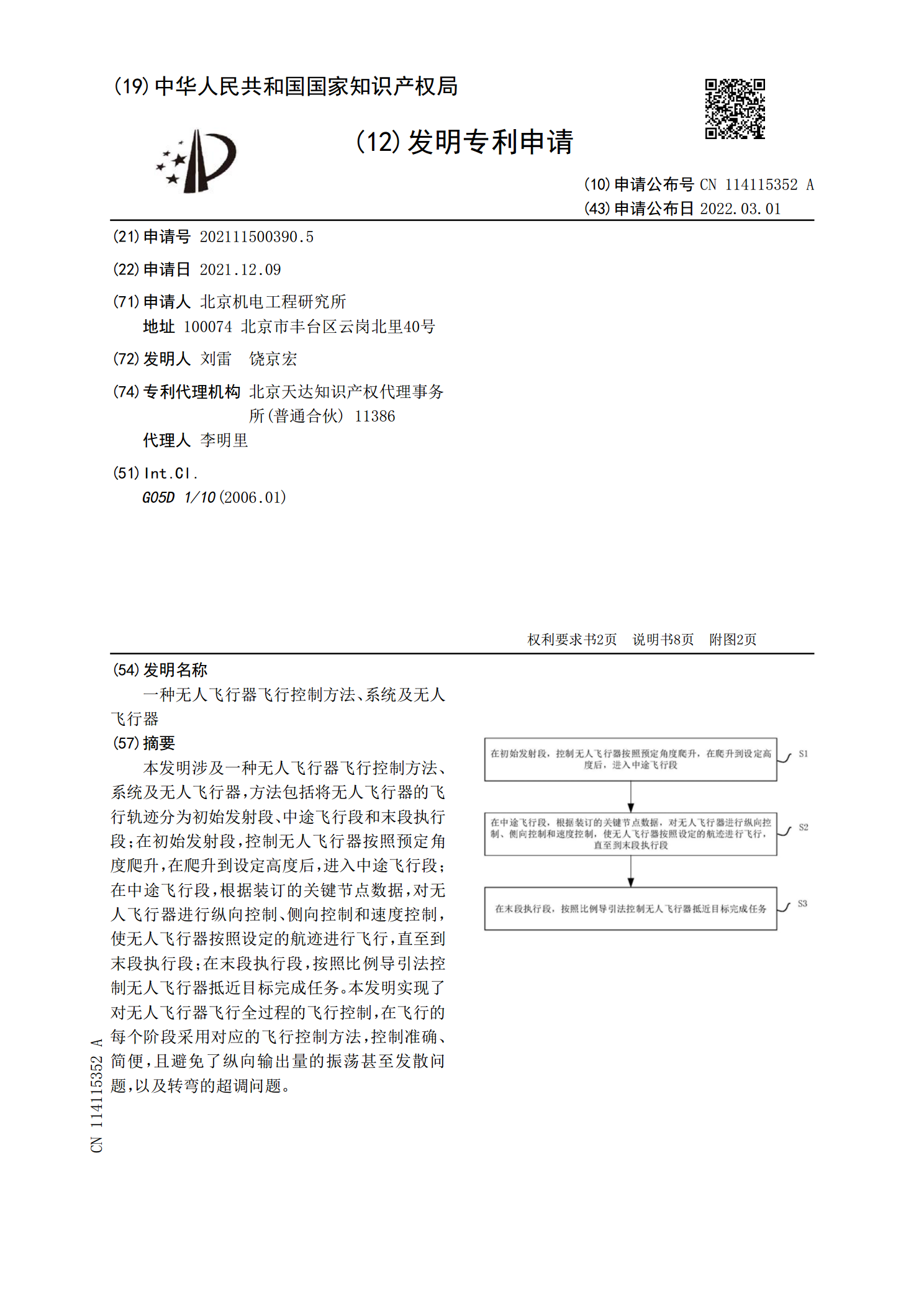
一种无人飞行器飞行控制方法、系统及无人飞行器.pdf
本发明涉及一种无人飞行器飞行控制方法、系统及无人飞行器,方法包括将无人飞行器的飞行轨迹分为初始发射段、中途飞行段和末段执行段;在初始发射段,控制无人飞行器按照预定角度爬升,在爬升到设定高度后,进入中途飞行段;在中途飞行段,根据装订的关键节点数据,对无人飞行器进行纵向控制、侧向控制和速度控制,使无人飞行器按照设定的航迹进行飞行,直至到末段执行段;在末段执行段,按照比例导引法控制无人飞行器抵近目标完成任务。本发明实现了对无人飞行器飞行全过程的飞行控制,在飞行的每个阶段采用对应的飞行控制方法,控制准确、简便,且