
基于工业机器人的自动取袋称量装置的设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于工业机器人的自动取袋称量装置的设计.docx
基于工业机器人的自动取袋称量装置的设计随着工业化的不断发展,工业机器人逐渐成为生产加工中不可或缺的工具。在工业生产中,往往伴随着大量的物料输送和称量作业,这些琐碎的劳动不仅人力资源浪费,而且效率低下,尤其长时间受到重量的影响,劳动者甚至可能出现健康问题。因此,在这个背景下,设计一款基于工业机器人的自动取袋称量装置就显得尤为重要和必要。本文将从机器人的选择、系统结构设计、关键技术等方面进行阐述。一.机器人的选择首先,选定的机器人要能够完成物料自动取袋、自动开袋、自动完成称量等工作。在目前的市场上,常见的机器
一种基于工业机器人的自动取物称量装置.pdf
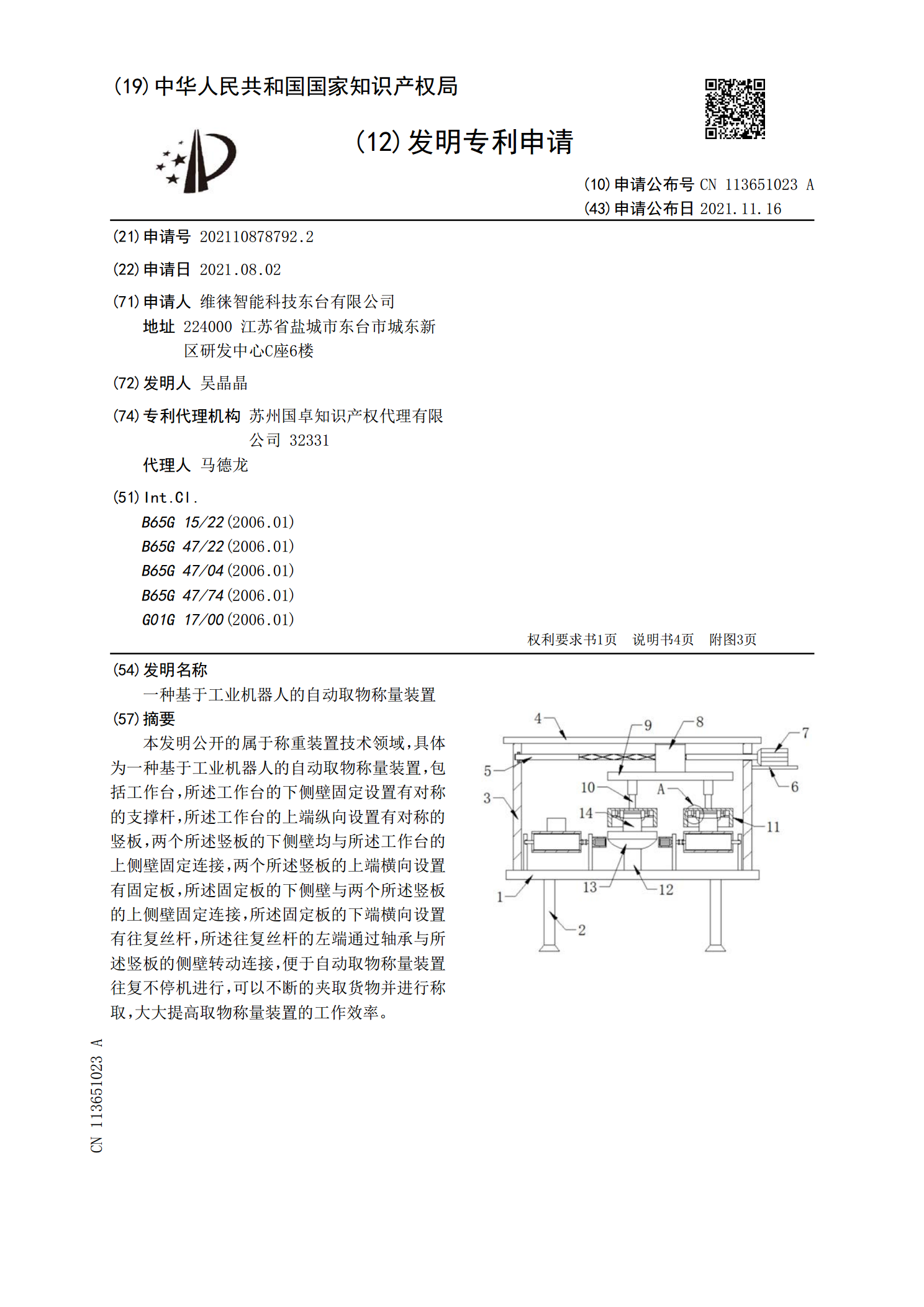
本发明公开的属于称重装置技术领域,具体为一种基于工业机器人的自动取物称量装置,包括工作台,所述工作台的下侧壁固定设置有对称的支撑杆,所述工作台的上端纵向设置有对称的竖板,两个所述竖板的下侧壁均与所述工作台的上侧壁固定连接,两个所述竖板的上端横向设置有固定板,所述固定板的下侧壁与两个所述竖板的上侧壁固定连接,所述固定板的下端横向设置有往复丝杆,所述往复丝杆的左端通过轴承与所述竖板的侧壁转动连接,便于自动取物称量装置往复不停机进行,可以不断的夹取货物并进行称取,大大提高取物称量装置的工作效率。

基于工业机器人的多工位热电池粉料自动称量系统.docx
基于工业机器人的多工位热电池粉料自动称量系统基于工业机器人的多工位热电池粉料自动称量系统摘要:随着热电池技术的快速发展,热电池在能源储存和电动车领域有广泛的应用前景。热电池的制备过程中,粉料的称量是关键步骤之一。然而,传统的手工称量方式存在效率低下、易出错等问题。为解决这些问题,本文基于工业机器人的多工位热电池粉料自动称量系统,设计了系统的硬件构架和软件控制系统。通过实施自动化称量方案,提高了生产效率、减少了人为因素对称量精度的影响。实验结果表明,该系统具有良好的可行性和实用性。关键词:热电池、工业机器人

基于机器人的自动取件系统的布局设计与优化.docx
基于机器人的自动取件系统的布局设计与优化基于机器人的自动取件系统的布局设计与优化摘要:随着电子商务的快速发展,取件需求量急剧增加,传统的人工取件方式已经无法满足需求。因此,基于机器人的自动取件系统应运而生。本文旨在研究自动取件系统的布局设计与优化,提高系统的效率和用户体验。第一部分:引言1.1研究背景随着电子商务的迅速增长,取件需求量不断增加,传统的人工取件方式已经无法满足需求。基于机器人的自动取件系统在这种背景下应运而生。1.2研究目的和意义本文旨在探讨自动取件系统的布局设计与优化,提高系统的效率和用户

基于PLC的料仓自动取料气动装置设计.doc
基于PLC的料仓自动取料气动装置设计郝屏仵征(河南化工职业学院机械电子系河南郑州450042)摘要:新设计的料仓自动取料系统采用PLC控制以气压传动作为系统工作动力。通过模拟运行新的装置系统具有动作灵活多变运动定位准确的特点能较好地实现流水线的自动化控制降低劳动强度。关键词:取料装置气动系统PLC控制系统中图分类号:TH138文献标识码:BDesignofPLCAutomaticFetchingDeviceBasedonPneumaticBunkerHAO