
基于工业机器人的多工位热电池粉料自动称量系统.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于工业机器人的多工位热电池粉料自动称量系统.docx
基于工业机器人的多工位热电池粉料自动称量系统基于工业机器人的多工位热电池粉料自动称量系统摘要:随着热电池技术的快速发展,热电池在能源储存和电动车领域有广泛的应用前景。热电池的制备过程中,粉料的称量是关键步骤之一。然而,传统的手工称量方式存在效率低下、易出错等问题。为解决这些问题,本文基于工业机器人的多工位热电池粉料自动称量系统,设计了系统的硬件构架和软件控制系统。通过实施自动化称量方案,提高了生产效率、减少了人为因素对称量精度的影响。实验结果表明,该系统具有良好的可行性和实用性。关键词:热电池、工业机器人
一种多工位小粉料自动称量系统的布局方法.pdf
本发明提供一种多工位小粉料自动称量系统的布局方法,包括收集不同配方中所需物料的重量以及物料称量次数的信息;根据物料的称量次数以及重量进行排序;根据物料的称量次数排序信息选择需称重的物料品种、数量以及称重秤数量;根据物料的称量次数和重量选择物料品种与称量秤的排布;根据物料的称量次数计算并设计出最优的物料品种与称量秤的排布。本发明改变现有的依靠经验来设计排布在自动称量系统中的物料品种及物料品种布局的方法,利用此方法可以减少设备投资、减少设备占地面积、提高现有设备利用率,另外可以减少称量等待时间、缩短配方单袋称

热电池加热粉称量工艺改进与自动称量系统设计.docx
热电池加热粉称量工艺改进与自动称量系统设计热电池加热粉称量工艺改进与自动称量系统设计摘要:热电池是一种常见的电化学热能转换设备,用于将热能转换为电能或者反过来。加热粉是热电池中关键的部件之一,它的称量精度对于热电池的性能和稳定性起着重要作用。本文针对现有热电池加热粉称量工艺存在的问题,提出了一种改进的工艺和设计了一套自动称量系统,以提高热电池生产的效率和精度。1.引言热电池作为一种重要的能源转换设备,广泛应用于航空航天、能源存储、冶金等领域。加热粉是构成热电池的关键材料之一,其称量精度和均匀性对热电池的性
一种多工位自动精确称量及定量加料系统.pdf
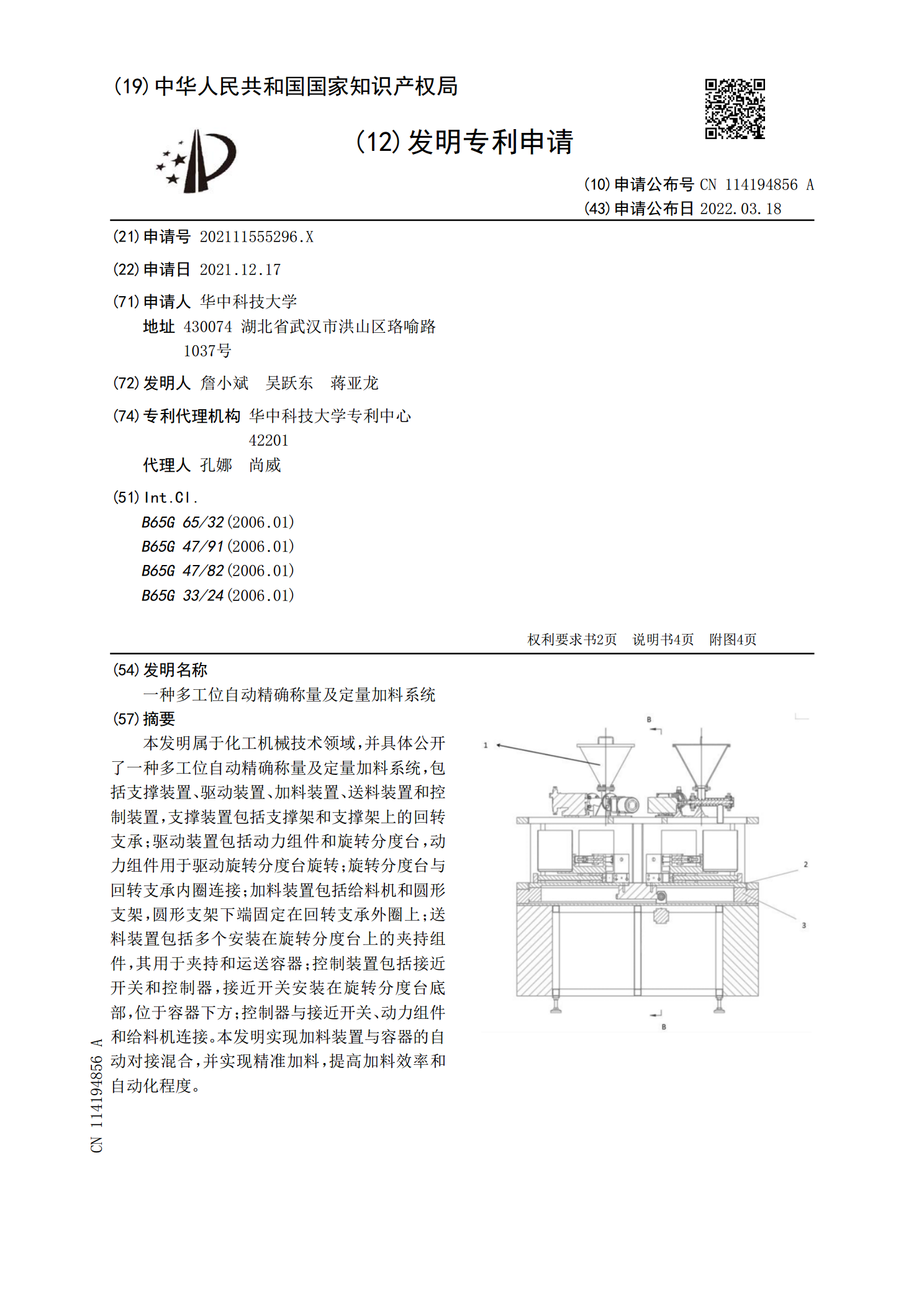
本发明属于化工机械技术领域,并具体公开了一种多工位自动精确称量及定量加料系统,包括支撑装置、驱动装置、加料装置、送料装置和控制装置,支撑装置包括支撑架和支撑架上的回转支承;驱动装置包括动力组件和旋转分度台,动力组件用于驱动旋转分度台旋转;旋转分度台与回转支承内圈连接;加料装置包括给料机和圆形支架,圆形支架下端固定在回转支承外圈上;送料装置包括多个安装在旋转分度台上的夹持组件,其用于夹持和运送容器;控制装置包括接近开关和控制器,接近开关安装在旋转分度台底部,位于容器下方;控制器与接近开关、动力组件和给料机连

热电池加热粉称量工艺改进与自动称量系统设计的任务书.docx
热电池加热粉称量工艺改进与自动称量系统设计的任务书任务书一、任务背景热电池是一种将热能转化为电能的器件,广泛应用于医疗领域、无线通信领域、航空航天领域等。在制造热电池时,需要将加热粉按照一定比例称量并混合,再放入热电池中进行烧结。然而,目前的称量工艺存在一些问题:一是人工称量容易出现误差,影响了产品的质量;二是人工操作费时费力,低效。因此,有必要对称量工艺进行改进,设计一套自动称量系统,提高工作效率及产品质量。二、任务内容1.对现有工艺进行分析和总结,确定可改进的地方。2.研究并设计一套自动称量系统,实现