
基于多传感器的超高压输电线路巡检机器人越障控制.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多传感器的超高压输电线路巡检机器人越障控制.docx
基于多传感器的超高压输电线路巡检机器人越障控制摘要本文基于多传感器的超高压输电线路巡检机器人越障控制,提出了一种有效的机器人越障控制方案。该方案采用了多种传感器技术,包括视觉传感器、声纳传感器、激光雷达传感器等,通过数据融合和算法优化,实现了机器人的自主避障和越障功能。实验结果表明,该方案具有较高的稳定性和可靠性,可应用于超高压输电线路巡检机器人的越障控制。关键词:超高压输电线路巡检机器人;多传感器;越障控制;数据融合;算法优化AbstractInthispaper,basedonthemulti-sen

基于多传感器的输电线巡检机器人越障伺服控制.docx
基于多传感器的输电线巡检机器人越障伺服控制随着社会的发展和科技的不断进步,输电线路巡检机器人也越来越受到人们的关注。相应地,为了提高机器人的智能度和准确性,多传感器的应用已经逐渐成为一种趋势。本文结合实际,阐述基于多传感器的输电线巡检机器人越障伺服控制的相关技术。一、多传感器的应用多传感器可以在不同的环境中对目标进行多方位、多通道的信息采集。在求解目标状态时,通过并联信息可以得到更全面、更准确、更可靠的目标状态信息,并能在目标状态不同时对不同的信息进行集成、评价和选择。因此,基于多传感器的输电线巡检机器人
一种架空输电线路巡检机器人越障装置及越障方法.pdf
本发明涉及一种架空输电线路巡检机器人越障装置及越障方法,其中越障装置包括巡检机器人机体、摆动机架、复位装置和驱动臂,所述摆动支架为两个,分别安装在巡检机器人机体两端,摆动支架可绕巡检机器人机体轴线运动,每个所述摆动机架的不同侧错位安装复位装置,每个复位装置连接有驱动臂,驱动臂可相对摆动机架转动。本发明的越障装置在越障过程中行走轮无需通过脱线实现跨越障碍物,可直接从障碍物上面或侧面越过,避免脱线而导致越障失败,巡检效率高,机器人运行平稳且可靠性高。

架空输电线路巡检飞行机器人的多传感器调度方法研究.pptx
汇报人:目录PARTONEPARTTWO架空输电线路巡检的重要性飞行机器人技术的引入多传感器调度方法的必要性PARTTHREE研究内容概述研究方法和技术路线实验设计与实施PARTFOUR传感器数据采集与处理调度算法设计与优化算法实现与测试PARTFIVE实验结果展示结果分析与讨论算法性能评估PARTSIX研究结论总结研究成果与贡献未来工作展望与计划THANKYOU
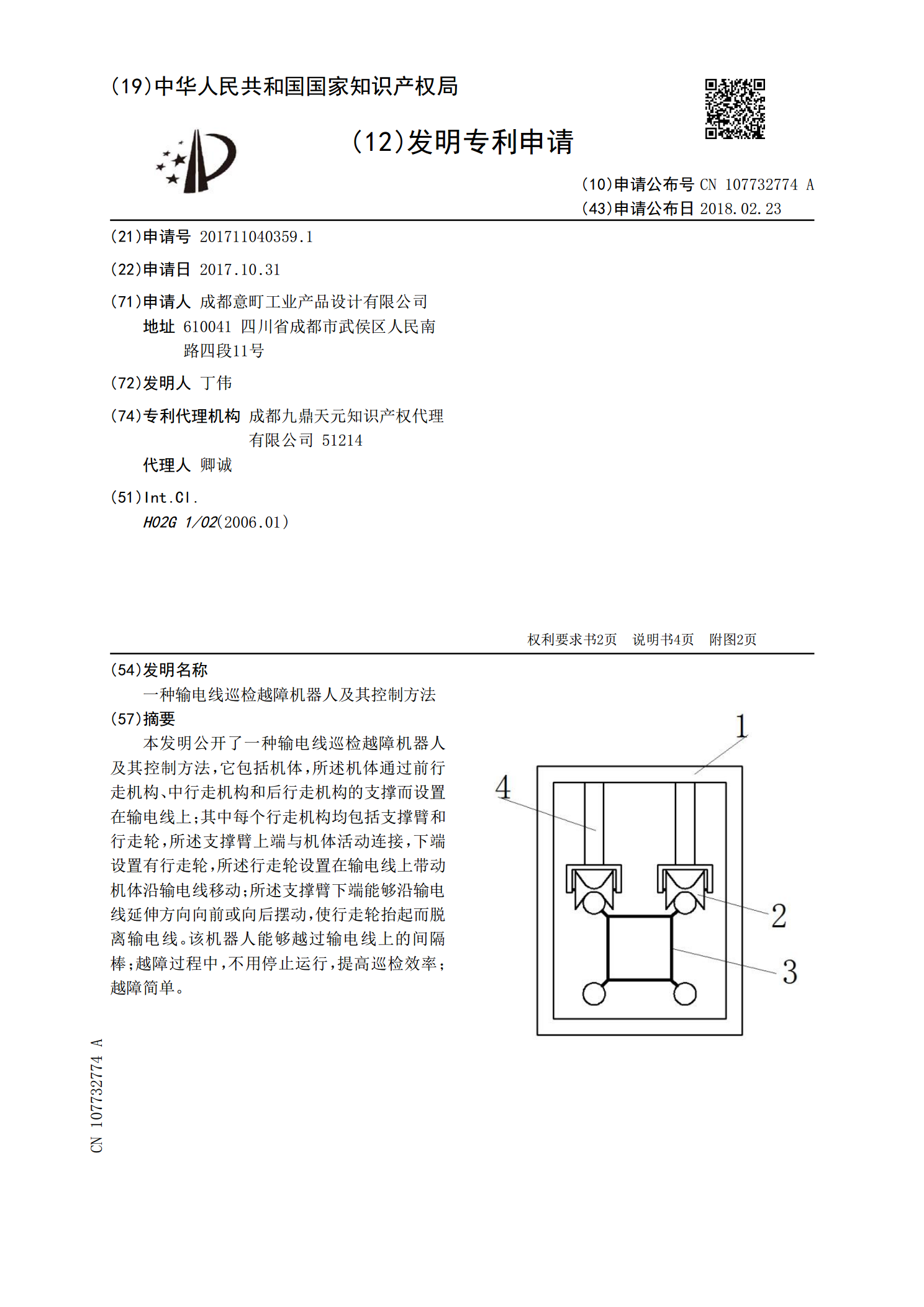
一种输电线巡检越障机器人及其控制方法.pdf
本发明公开了一种输电线巡检越障机器人及其控制方法,它包括机体,所述机体通过前行走机构、中行走机构和后行走机构的支撑而设置在输电线上;其中每个行走机构均包括支撑臂和行走轮,所述支撑臂上端与机体活动连接,下端设置有行走轮,所述行走轮设置在输电线上带动机体沿输电线移动;所述支撑臂下端能够沿输电线延伸方向向前或向后摆动,使行走轮抬起而脱离输电线。该机器人能够越过输电线上的间隔棒;越障过程中,不用停止运行,提高巡检效率;越障简单。