
基于CMOS摄像头的寻迹智能样车的研究与实现.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于CMOS摄像头的寻迹智能样车的研究与实现.docx
基于CMOS摄像头的寻迹智能样车的研究与实现摘要本论文介绍了基于CMOS摄像头的寻迹智能样车的研究与实现。通过对CMOS摄像头的原理和应用、寻迹控制、小车驱动等方面的研究和探讨,设计了一款能够在黑线追踪任务中实现精准寻迹的智能样车。该样车利用摄像头采集路面上的图像进行信息处理,通过算法识别出黑线,并进行转向操作,从而实现了自动驾驶。实验结果表明,该智能样车能够实现高效、准确的跟踪和控制。关键词:CMOS摄像头;寻迹控制;智能样车;特征点检测算法AbstractThispaperintroducesther

基于视觉的智能寻迹车设计与实现.docx
基于视觉的智能寻迹车设计与实现随着无人驾驶技术的不断发展,视觉智能寻迹车成为了研究的热点。本文将介绍基于视觉的智能寻迹车的设计与实现。一、研究背景视觉智能寻迹车是一种利用摄像机等传感器进行图像识别,从而实现自主行驶的技术。其中,图像识别技术是视觉智能寻迹车的核心技术。随着机器学习、深度学习、神经网络等技术的不断发展,视觉智能寻迹车的控制精度和可靠性不断提高。因此,基于视觉的智能寻迹车逐渐成为了当今研究的热点。二、设计思路视觉智能寻迹车的设计主要分为以下几个步骤:1.选用合适的硬件平台硬件平台是视觉智能寻迹

基于CMOS摄像头的智能车图像处理.docx
基于CMOS摄像头的智能车图像处理基于CMOS摄像头的智能车图像处理技术摘要:随着科技的发展,智能车技术逐渐成为人们关注的焦点之一。智能车的核心是图像处理技术,而摄像头作为智能车感知外界环境的核心设备之一,在智能车图像处理中起到了至关重要的作用。该论文主要介绍了基于CMOS摄像头的智能车图像处理技术,包括摄像头的选型及特点、图像采集与预处理、目标检测与跟踪、图像识别与分类等方面。通过对摄像头图像处理技术的研究,可以为智能车的行驶提供更加安全、高效的支持。1.引言智能车技术是指通过智能化的传感器、控制系统和
基于路径识别的寻迹智能车设计与实现.pdf
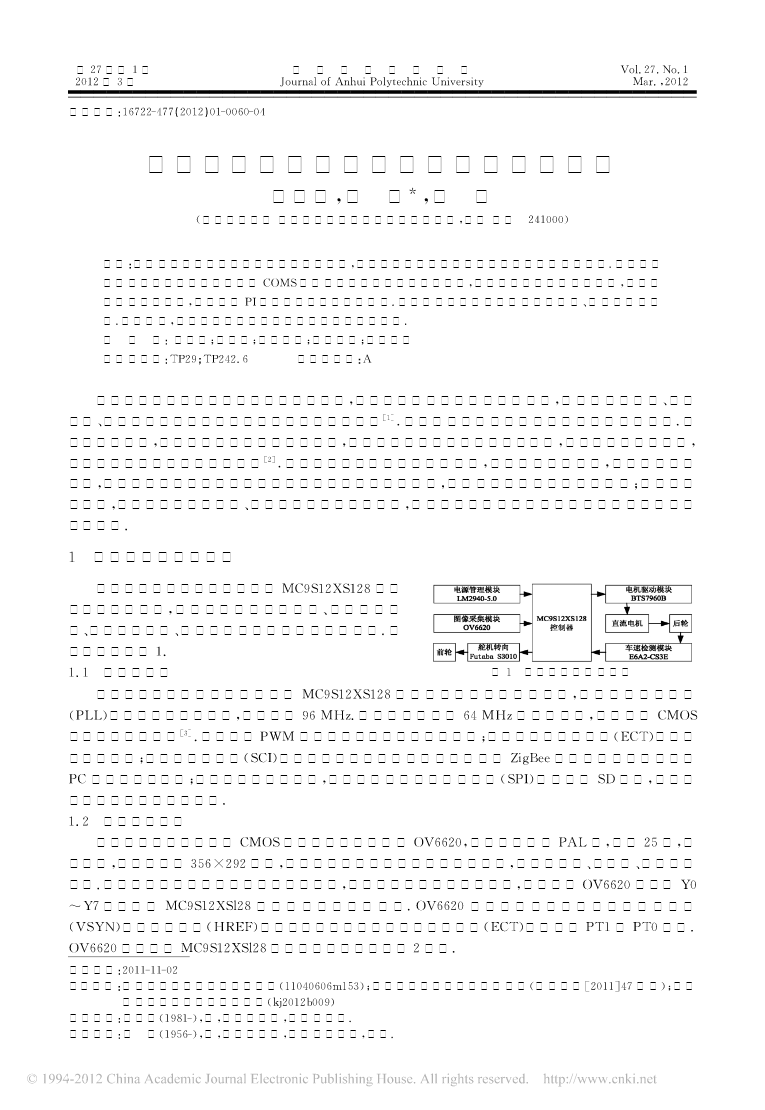
第27卷第1期安徽工程大学学报Vol.27.No.12012年3月JournalofAnhuiPolytechnicUniversityMar.,2012文章编号:16722-477(2012)01-0060-04基于路径识别的寻迹智能车设计与实现孙书诚,郎朗*,王虎(安徽工程大学安徽省电气传动与控制重点实验室,安徽芜湖241000)摘要:为了实现智能车沿道路上引导线自动寻迹,研制一种基于模型汽车为硬件平台的
基于CCD传感器的智能寻迹模型车的研究与实现.pdf
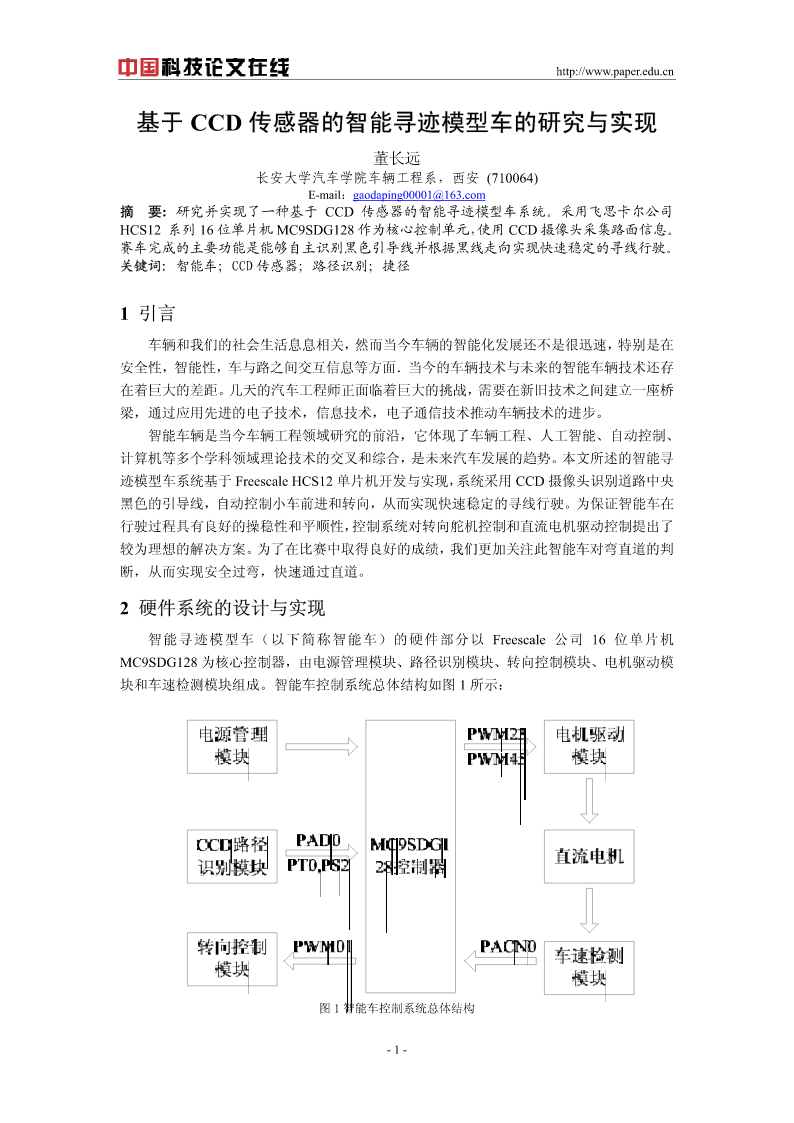
http://www.paper.edu.cn基于CCD传感器的智能寻迹模型车的研究与实现董长远长安大学汽车学院车辆工程系,西安(710064)E-mail:gaodaping00001@163.com摘要:研究并实现了一种基于CCD传感器的智能寻迹模型车系统。采用飞思卡尔公司HCS12系列16位单片机MC9SDG128作为核心控制单元,使用CCD摄像头采集路面信息。赛车完成的主要功能是能够自主识别黑色引导线并根据黑线走向实现快速稳定的寻线行驶。关键词:智能车;CCD传感器;路径识别;捷径1引言车辆和我们