
基于路径识别的寻迹智能车设计与实现.pdf

as****16

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于路径识别的寻迹智能车设计与实现.pdf
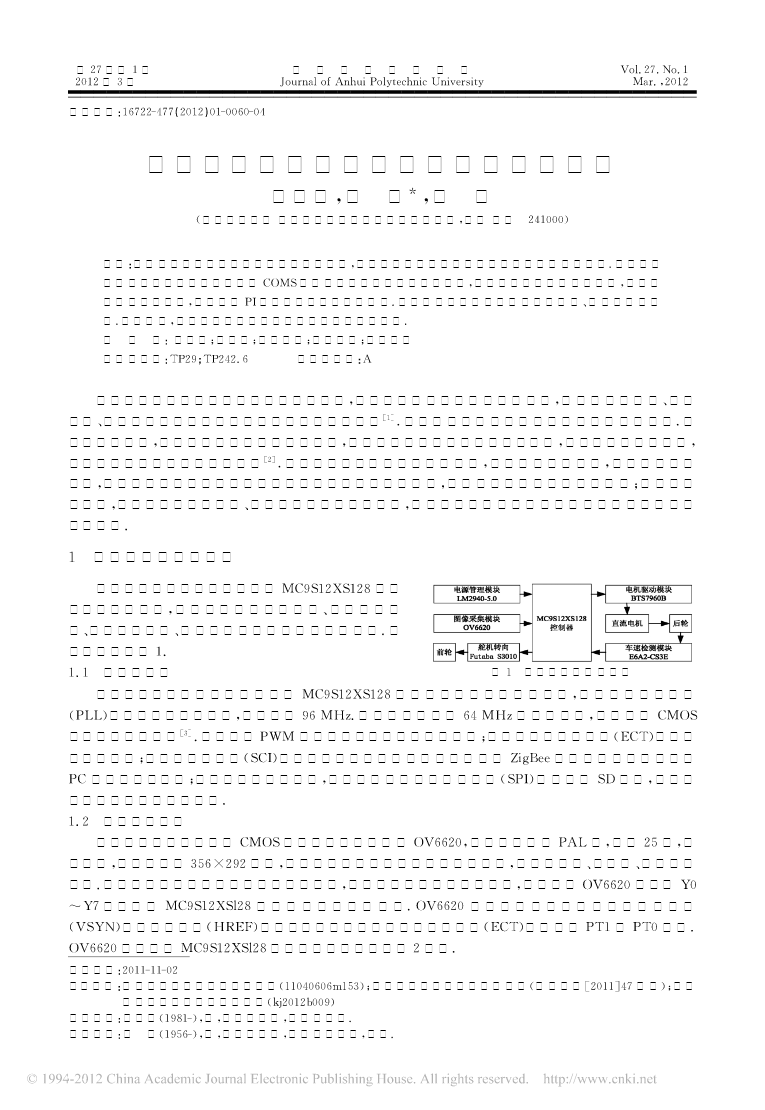
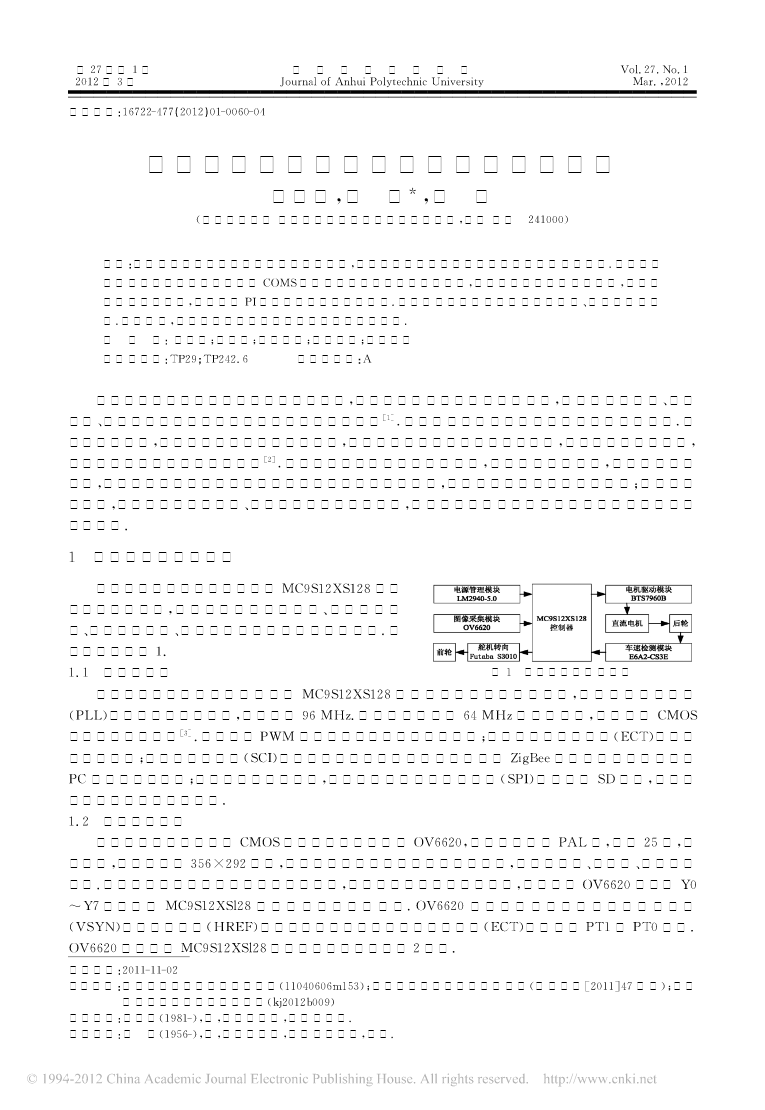
第27卷第1期安徽工程大学学报Vol.27.No.12012年3月JournalofAnhuiPolytechnicUniversityMar.,2012文章编号:16722-477(2012)01-0060-04基于路径识别的寻迹智能车设计与实现孙书诚,郎朗*,王虎(安徽工程大学安徽省电气传动与控制重点实验室,安徽芜湖241000)摘要:为了实现智能车沿道路上引导线自动寻迹,研制一种基于模型汽车为硬件平台的

基于视觉的智能寻迹车设计与实现.docx
基于视觉的智能寻迹车设计与实现随着无人驾驶技术的不断发展,视觉智能寻迹车成为了研究的热点。本文将介绍基于视觉的智能寻迹车的设计与实现。一、研究背景视觉智能寻迹车是一种利用摄像机等传感器进行图像识别,从而实现自主行驶的技术。其中,图像识别技术是视觉智能寻迹车的核心技术。随着机器学习、深度学习、神经网络等技术的不断发展,视觉智能寻迹车的控制精度和可靠性不断提高。因此,基于视觉的智能寻迹车逐渐成为了当今研究的热点。二、设计思路视觉智能寻迹车的设计主要分为以下几个步骤:1.选用合适的硬件平台硬件平台是视觉智能寻迹
片机的智能寻迹模型车的设计与实现.pdf
出薹三睁愿升竺基于HCS2单片机的智能寻迹模型车的设计与实现1SCM1坠型堡堡E;i了孑计算机工程与设计‘毅,杨天DesignandimplementationoftrackmodelbasedCCD路径I!垒竺..第29卷第18期2008年9月韩(长安大学汽车学院车辆工程系,陕西西安710064)intelligent-searchingHCSl2(School710064,China)0引言1硬件系统的设计与实现1.2电源管理模块摘要:设计并实现了一种基于HCSl2单片机的智能寻迹模型车系统。采用飞思

基于磁导航路径识别的智能车设计2.doc
工学院本科生毕业设计(论文)基于磁导航路径识别的智能车设计——软件设计TheDesignofSmartCarBasedonMagneticNavigationPathIdentification——SoftwareDesign总计:37页表格:1个插图:16幅南阳理工学院本科毕业设计(论文)基于磁导航路径识别的智能车设计——软件设计TheDesignofSmartCarBasedonMagneticNavigationPathIdentification——SoftwareDesign学院(系):电子系专

基于磁导航路径识别的智能车设计2.doc
工学院本科生毕业设计(论文)基于磁导航路径识别的智能车设计——软件设计TheDesignofSmartCarBasedonMagneticNavigationPathIdentification——SoftwareDesign总计:37页表格:1个插图:16幅南阳理工学院本科毕业设计(论文)基于磁导航路径识别的智能车设计——软件设计TheDesignofSmartCarBasedonMagneticNavigationPathIdentification——SoftwareDesign学院(系):电子系专