
单神经元PID算法在包装机温控系统中的应用.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

单神经元PID算法在包装机温控系统中的应用.docx
单神经元PID算法在包装机温控系统中的应用单神经元PID算法在包装机温控系统中的应用摘要:温控系统是包装机中至关重要的一个部分,对于保证包装机的正常运行和产品质量有着重要的影响。PID控制算法是一种常用的控制算法,在温控系统中广泛应用。但是传统的PID算法存在着参数调节困难、响应速度慢等问题。为了解决这些问题,本文提出了一种基于单神经元PID算法的包装机温控系统。通过实验验证,该算法在包装机温控系统中具有较好的性能表现。关键词:包装机;温控系统;PID算法;单神经元;性能表现1.引言包装机温控系统是包装行

PID算法在温控系统中的应用.docx
PID算法在温控系统中的应用PID算法在温控系统中的应用摘要:PID(Proportional-Integral-Derivative)算法是一种经典的控制算法,常用于温控系统中。本文将讨论PID算法的基本原理、优势和应用,重点分析其在温控系统中的应用。通过PID算法能够实现对温度的精确控制,提高温控系统的稳定性和性能。关键词:PID算法、温控系统、控制精度、稳定性、性能优化1.引言温控系统广泛应用于各个领域,包括工业生产、生物实验、航天航空等。温度作为一个重要的参数,对于许多工艺过程和实验的成功进行起着

PID算法在冷藏温控中的应用.docx
PID算法在冷藏温控中的应用随着科技的不断进步和应用需求的不断增加,温度控制的重要性随之变得越来越突出。冰箱、冷库、恒温箱、温室和室外空调等,都需要在一定温度范围内保持恒定的温度。PID控制算法是常用的三态控制算法,具有快速响应、稳定性好、设计简单、调节方便等特点,目前已被广泛地应用于冷藏温控的领域中。PID算法是根据反馈信号对控制器输出进行调节的一种使用比例(P)、积分(I)、微分(D)三个参数的线性控制策略。在冷藏温控中,对于需要维持恒温的房间或设备,PID算法可以准确地控制温度。其基本思想是,根据设

单神经元PID算法在流量比值控制中的应用.docx
单神经元PID算法在流量比值控制中的应用IntroductionPIDcontrolisawidelyusedcontrolalgorithminindustrialcontrolsystemsduetoitssimplicityandeffectiveness.Ithasbeenusedinavarietyofcontrolapplications,oneofwhichisflowratiocontrol.Flowratiocontrolistheprocessofcontrollingtheratio
温控系统中改进的PID 算法.pdf
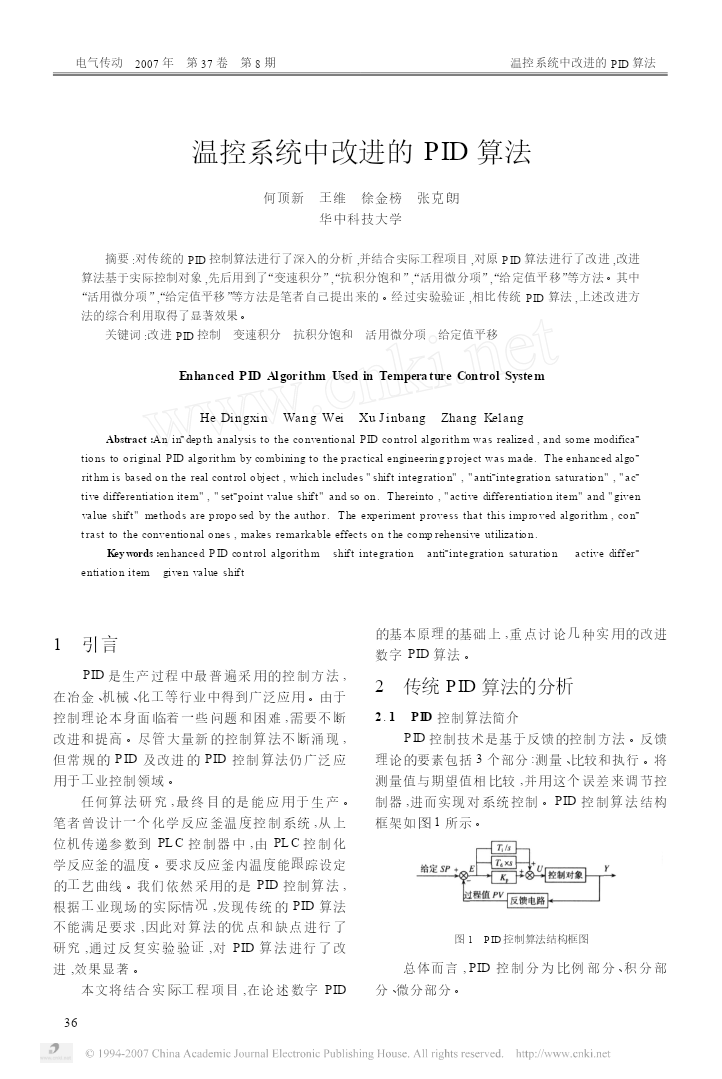
电气传动2007年第37卷第8期温控系统中改进的PID算法温控系统中改进的PID算法何顶新王维徐金榜张克朗华中科技大学摘要:对传统的PID控制算法进行了深入的分析,并结合实际工程项目,对原PID算法进行了改进,改进算法基于实际控制对象,先后用到了“变速积分”“,抗积分饱和”“,活用微分项”“,给定值平移”等方法。其中“活用微分项”“,给定值平移”等方法是笔者自己提出来的。经过实验验证,相比传统PID算法,上述改进方法的综合利用取得了显著效果。关键词:改进PID控制变速积分抗积分饱和活用微分项给定值平移En