
温控系统中改进的PID 算法.pdf

xf****65

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
温控系统中改进的PID 算法.pdf
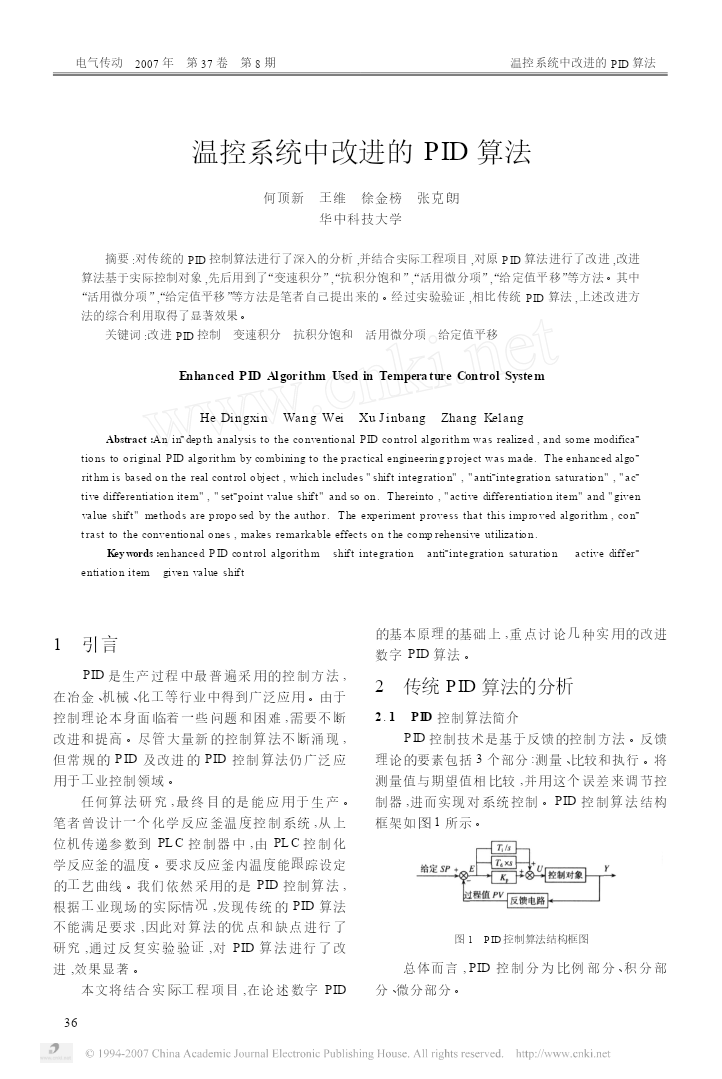
电气传动2007年第37卷第8期温控系统中改进的PID算法温控系统中改进的PID算法何顶新王维徐金榜张克朗华中科技大学摘要:对传统的PID控制算法进行了深入的分析,并结合实际工程项目,对原PID算法进行了改进,改进算法基于实际控制对象,先后用到了“变速积分”“,抗积分饱和”“,活用微分项”“,给定值平移”等方法。其中“活用微分项”“,给定值平移”等方法是笔者自己提出来的。经过实验验证,相比传统PID算法,上述改进方法的综合利用取得了显著效果。关键词:改进PID控制变速积分抗积分饱和活用微分项给定值平移En

PID算法在温控系统中的应用.docx
PID算法在温控系统中的应用PID算法在温控系统中的应用摘要:PID(Proportional-Integral-Derivative)算法是一种经典的控制算法,常用于温控系统中。本文将讨论PID算法的基本原理、优势和应用,重点分析其在温控系统中的应用。通过PID算法能够实现对温度的精确控制,提高温控系统的稳定性和性能。关键词:PID算法、温控系统、控制精度、稳定性、性能优化1.引言温控系统广泛应用于各个领域,包括工业生产、生物实验、航天航空等。温度作为一个重要的参数,对于许多工艺过程和实验的成功进行起着

基于改进的PID算法的小卫星高精度温控系统.docx
基于改进的PID算法的小卫星高精度温控系统小卫星高精度温控系统是保证小卫星安全稳定运行的重要组成部分,同时也是提高小卫星任务执行能力的关键技术之一。PID算法作为常用的温控系统控制算法,具有结构简单、易于实现和调节、适应性强等优点,但是在实际应用中仍然存在一些问题,如响应速度慢、震荡幅度大等。因此,本论文将研究基于改进的PID算法的小卫星高精度温控系统。一、小卫星温控系统的工作原理小卫星温控系统的基本工作原理是通过感温元件、控制器和执行机构等组成的闭环控制系统进行温度调节。具体流程如下:(1)感温元件:通

基于改进PID算法的CFB锅炉床温控制.docx
基于改进PID算法的CFB锅炉床温控制标题:基于改进PID算法的CFB锅炉床温控制摘要:随着现代工业的发展,锅炉作为能源的重要装备之一,其稳定的运行对于保证工业生产的连续性至关重要。本论文针对循环流化床(CFB)锅炉的床温控制问题展开研究,采用改进的PID(Proportional-Integral-Derivative)算法,通过调整控制器的参数,优化控制策略,以提高CFB锅炉的床温稳定性和控制精度。一、引言循环流化床(CFB)锅炉作为一种新型的燃煤锅炉,具有燃烧效率高、环保等优点,在工业领域得到了广泛

基于改进的PID算法的小卫星高精度温控系统的任务书.docx
基于改进的PID算法的小卫星高精度温控系统的任务书任务书一、项目简述随着卫星发射技术的不断发展,小型卫星越来越受到各行各业的关注。作为卫星中不可缺少的重要组成部分,温控系统的稳定性对于卫星的任务完成很关键。本项目旨在研究和开发一种基于改进的PID(比例-积分-微分)算法的小卫星高精度温控系统,以实现对小卫星温度的快速调控和精准控制。二、项目内容及主要技术方案1.系统需求及性能指标(1)稳定控制温度范围在±1℃的误差范围内;(2)控制精度高,可达到0.1℃;(3)系统的调控时间在1min以内,响应速度在10