
主动隔振器的自适应模糊控制研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

主动隔振器的自适应模糊控制研究.docx
主动隔振器的自适应模糊控制研究一、引言主动隔振器广泛应用于许多领域,如精密仪器、航空航天、汽车制造等。传统的主动隔振器往往根据系统模型预测振动,并使用一些控制策略来抑制振动。但是,这些方法往往不能适应复杂环境中的振动,因此需要一种更加智能、自适应的控制策略。本文将介绍一种基于模糊控制的自适应控制方法,用于改进主动隔振器的性能。二、主动隔振器的工作原理主动隔振器是一种通过传感器和执行器来监测和响应系统振动的装置。传感器测量振动信号,并将其传输到控制器中。控制器根据传感器信号预测未来的振动,并使用执行器来产生

主动隔振器的自适应模糊控制.docx
主动隔振器的自适应模糊控制主动隔振器的自适应模糊控制摘要:主动隔振器是一种常用的振动控制装置,能够有效减震减振。本文通过引入自适应模糊控制方法对主动隔振器进行控制,提高其匹配性和适应性。首先,介绍了主动隔振器的原理和结构;然后,详细阐述了自适应模糊控制的基本原理和方法;最后,利用实验数据对主动隔振器的自适应模糊控制进行了仿真分析和讨论,实验结果表明,自适应模糊控制能够有效提高主动隔振器的控制性能。关键词:主动隔振器;自适应模糊控制;减震减振1.引言随着科技的发展,振动控制技术在工程领域得到了广泛应用。主动

主动隔振器的自适应模糊控制的任务书.docx
主动隔振器的自适应模糊控制的任务书任务书项目名称:主动隔振器的自适应模糊控制项目背景及目标:隔振器是一种常用的控制装置,用于减少结构振动对周围环境的影响。传统的隔振器主要采用固定参数的控制策略,无法适应不同工况下的振动特性。而自适应模糊控制是一种具有优秀控制性能和适应能力的控制方法,能根据实时反馈信息调整控制参数,以达到控制效果的最优化。因此,本项目旨在将自适应模糊控制应用于主动隔振器中,提高隔振器的控制精度和适应能力。项目内容和方法:1.确定隔振器的结构和控制参数。根据实际需求,确定隔振器的质量、阻尼、
基于自适应模糊滑模控制的冷原子重力仪主动隔振方法.pdf
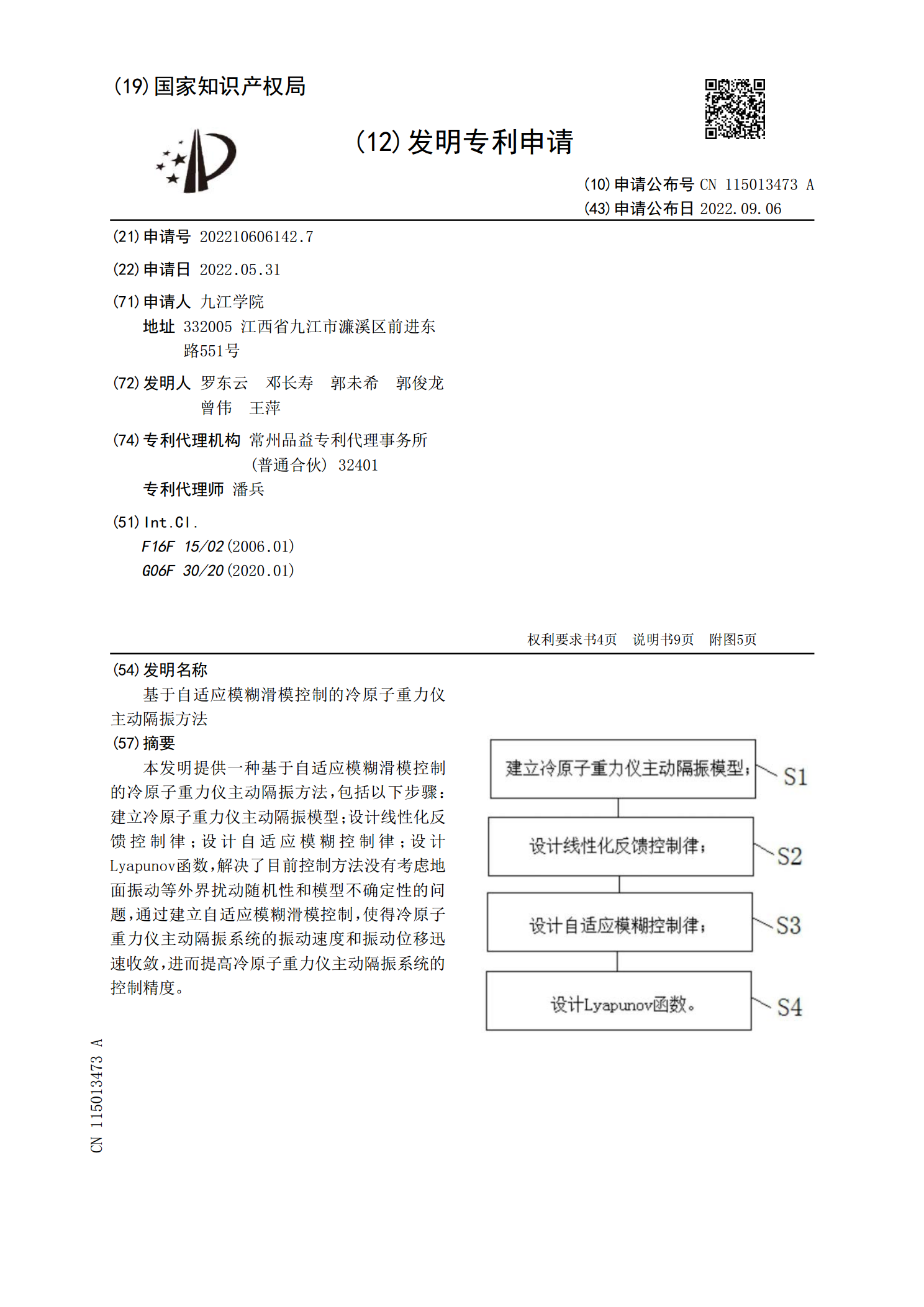
本发明提供一种基于自适应模糊滑模控制的冷原子重力仪主动隔振方法,包括以下步骤:建立冷原子重力仪主动隔振模型;设计线性化反馈控制律;设计自适应模糊控制律;设计Lyapunov函数,解决了目前控制方法没有考虑地面振动等外界扰动随机性和模型不确定性的问题,通过建立自适应模糊滑模控制,使得冷原子重力仪主动隔振系统的振动速度和振动位移迅速收敛,进而提高冷原子重力仪主动隔振系统的控制精度。

基于RDT的隔振平台自适应主动阻尼研究.docx
基于RDT的隔振平台自适应主动阻尼研究隔振平台是在振动环境中保护精密仪器和设备的关键部件,因此隔振平台的性能对于精密仪器和设备的性能和寿命具有重要影响。隔振平台与振动源之间的振动传递通常是通过底座和隔振垫实现的。然而,由于垫的刚度和阻尼难以保持稳定和一致,这导致了隔振性能的不稳定性和不可预测性。近年来,自适应主动隔振技术(ActiveVibrationIsolation,AVI)引起了广泛关注,该技术通过使用传感器和执行器来使隔振系统实现自适应控制,从而提高隔振性能。RDT(ResonanceDampin