
基于自适应模糊滑模控制的冷原子重力仪主动隔振方法.pdf

一吃****仕龙


1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于自适应模糊滑模控制的冷原子重力仪主动隔振方法.pdf
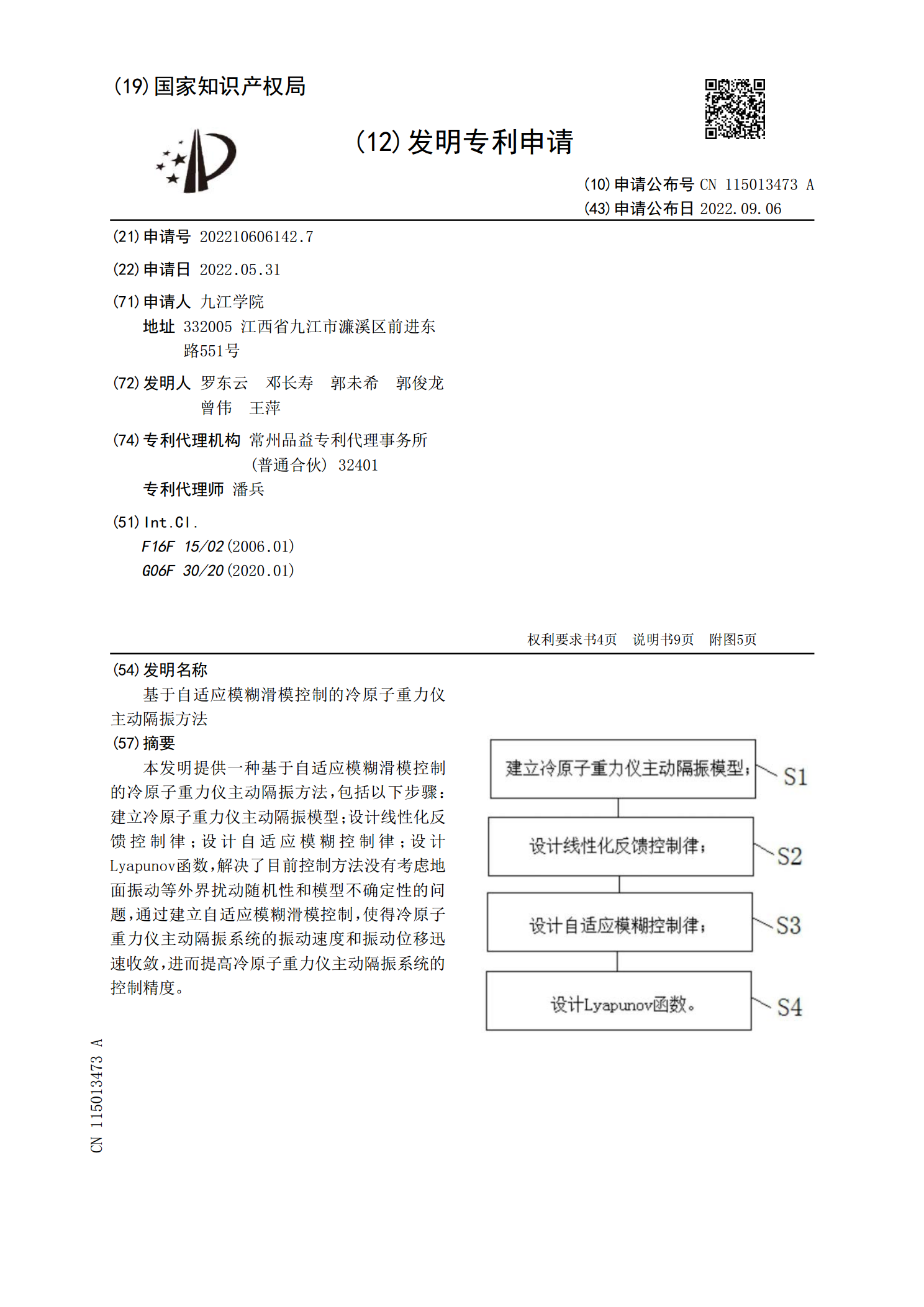
本发明提供一种基于自适应模糊滑模控制的冷原子重力仪主动隔振方法,包括以下步骤:建立冷原子重力仪主动隔振模型;设计线性化反馈控制律;设计自适应模糊控制律;设计Lyapunov函数,解决了目前控制方法没有考虑地面振动等外界扰动随机性和模型不确定性的问题,通过建立自适应模糊滑模控制,使得冷原子重力仪主动隔振系统的振动速度和振动位移迅速收敛,进而提高冷原子重力仪主动隔振系统的控制精度。

基于高增益观测器滑模控制的冷原子重力仪主动隔振方法.pdf
本发明提供了基于高增益观测器滑模控制的冷原子重力仪主动隔振方法,包括以下步骤:建立冷原子重力仪主动隔振模型;设计冷原子重力仪主动隔振系统的高增益观测器,对主动隔振系统内部参数变化的不确定性和外部地面振动不确定干扰进行观测;设计高增益观测器滑模控制律,解决了目前控制方法没有考虑地面振动等外界扰动随机性和模型不确定性的问题,通过建立高增益观测器滑模控制方法,使得冷原子重力仪主动隔振系统的振动速度和振动位移迅速收敛,进而提高冷原子重力仪主动隔振系统的控制精度。
一种基于名义模型的冷原子重力仪主动隔振控制方法.pdf
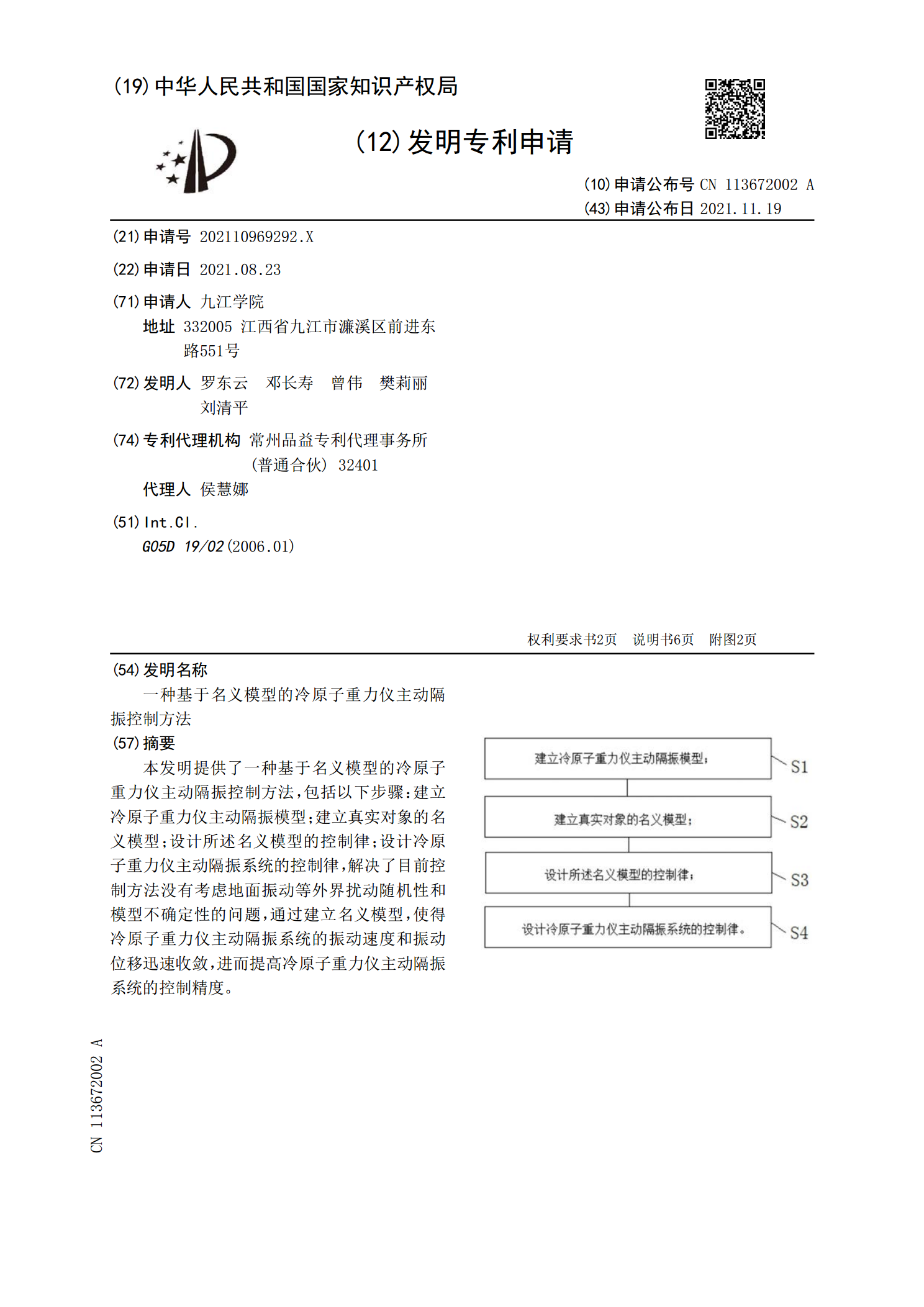
本发明提供了一种基于名义模型的冷原子重力仪主动隔振控制方法,包括以下步骤:建立冷原子重力仪主动隔振模型;建立真实对象的名义模型;设计所述名义模型的控制律;设计冷原子重力仪主动隔振系统的控制律,解决了目前控制方法没有考虑地面振动等外界扰动随机性和模型不确定性的问题,通过建立名义模型,使得冷原子重力仪主动隔振系统的振动速度和振动位移迅速收敛,进而提高冷原子重力仪主动隔振系统的控制精度。

主动隔振器的自适应模糊控制.docx
主动隔振器的自适应模糊控制主动隔振器的自适应模糊控制摘要:主动隔振器是一种常用的振动控制装置,能够有效减震减振。本文通过引入自适应模糊控制方法对主动隔振器进行控制,提高其匹配性和适应性。首先,介绍了主动隔振器的原理和结构;然后,详细阐述了自适应模糊控制的基本原理和方法;最后,利用实验数据对主动隔振器的自适应模糊控制进行了仿真分析和讨论,实验结果表明,自适应模糊控制能够有效提高主动隔振器的控制性能。关键词:主动隔振器;自适应模糊控制;减震减振1.引言随着科技的发展,振动控制技术在工程领域得到了广泛应用。主动

主动隔振器的自适应模糊控制研究.docx
主动隔振器的自适应模糊控制研究一、引言主动隔振器广泛应用于许多领域,如精密仪器、航空航天、汽车制造等。传统的主动隔振器往往根据系统模型预测振动,并使用一些控制策略来抑制振动。但是,这些方法往往不能适应复杂环境中的振动,因此需要一种更加智能、自适应的控制策略。本文将介绍一种基于模糊控制的自适应控制方法,用于改进主动隔振器的性能。二、主动隔振器的工作原理主动隔振器是一种通过传感器和执行器来监测和响应系统振动的装置。传感器测量振动信号,并将其传输到控制器中。控制器根据传感器信号预测未来的振动,并使用执行器来产生