
下肢外骨骼机器人行走过渡稳定性控制研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

下肢外骨骼机器人行走过渡稳定性控制研究.docx
下肢外骨骼机器人行走过渡稳定性控制研究摘要:本文针对下肢外骨骼机器人的控制问题,在行走过渡阶段中探讨了稳定性控制策略。通过分析外骨骼机器人的运动控制、步态规划和力控制等方面,研究了三种控制策略,分别为基于传统控制方法的PID控制、基于智能算法的模糊控制和深度强化学习控制,并讨论了它们的优缺点和应用场景。最后,通过实验数据分析,验证了本文提出的深度强化学习控制的有效性和优越性。关键词:下肢外骨骼机器人;稳定性控制;过渡阶段;深度强化学习1.引言下肢外骨骼机器人是一种可以增强人体运动能力的智能机器人,可以帮助

下肢外骨骼机器人辅助行走控制研究的任务书.docx
下肢外骨骼机器人辅助行走控制研究的任务书任务书:下肢外骨骼机器人辅助行走控制研究一、研究背景近年来,随着生活水平的提高和医疗技术的不断进步,老年人口和残疾人口在不断增加,许多人在日常生活中无法进行正常的行走,严重影响了他们的生活质量。而下肢外骨骼机器人成为一种新型的康复治疗设备,能够有效地帮助这些患者进行行走训练。下肢外骨骼机器人通过对人体下肢的辅助和支持,使患者得以独立行走,得到更好的康复效果。然而,下肢外骨骼机器人的研制和应用仍存在着一系列问题,其中最主要的问题就是如何实现对下肢机器人的控制。目前,国
下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人.pdf
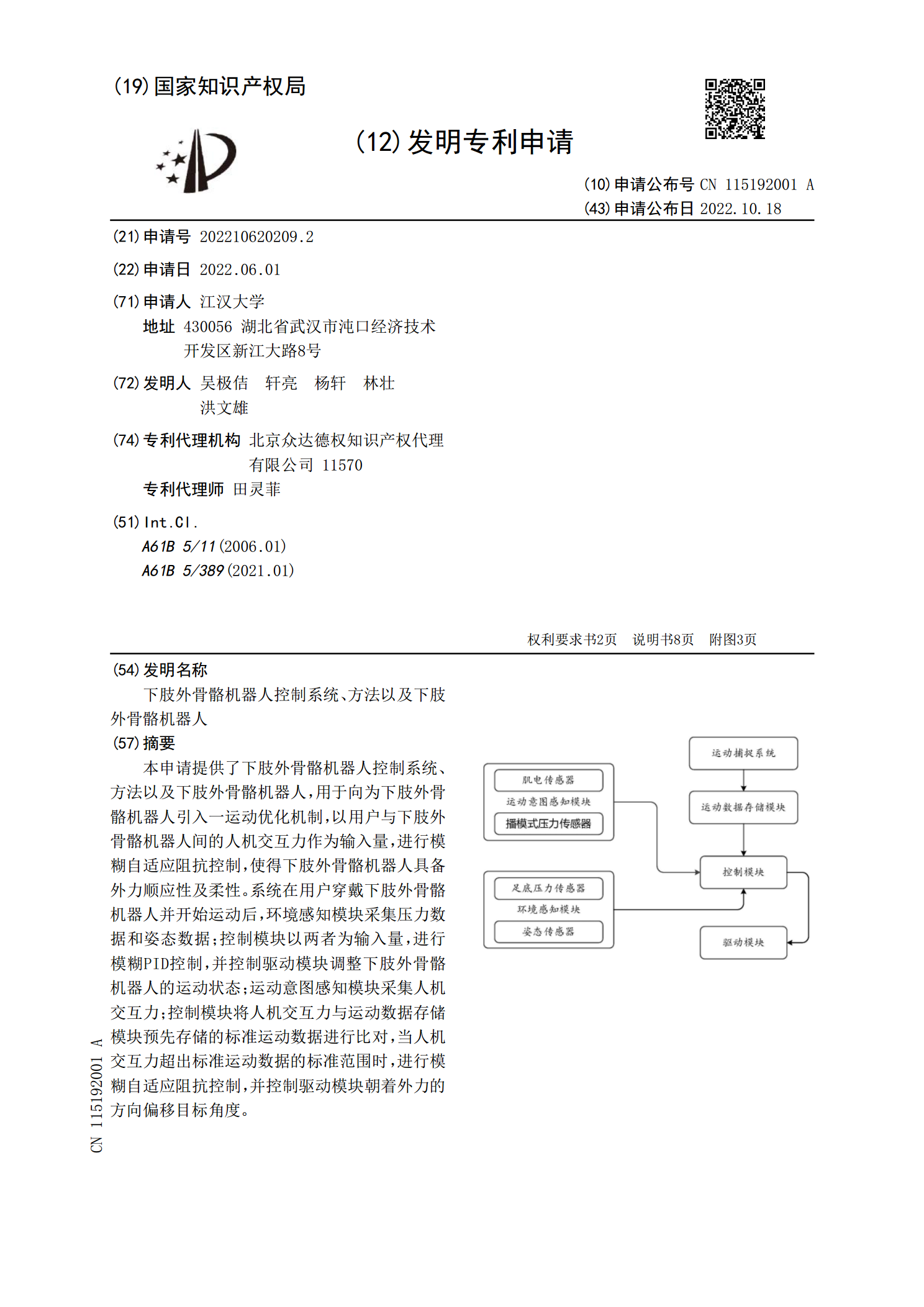
本申请提供了下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人,用于向为下肢外骨骼机器人引入一运动优化机制,以用户与下肢外骨骼机器人间的人机交互力作为输入量,进行模糊自适应阻抗控制,使得下肢外骨骼机器人具备外力顺应性及柔性。系统在用户穿戴下肢外骨骼机器人并开始运动后,环境感知模块采集压力数据和姿态数据;控制模块以两者为输入量,进行模糊PID控制,并控制驱动模块调整下肢外骨骼机器人的运动状态;运动意图感知模块采集人机交互力;控制模块将人机交互力与运动数据存储模块预先存储的标准运动数据进行比对,当人机交互力超

下肢外骨骼机器人的设计与研究.pptx
添加副标题目录PART01PART02背景介绍研究意义国内外研究现状研究目的与问题PART03设计理念与原则结构设计材料选择与加工工艺控制系统设计实验验证与测试PART04在医疗康复领域的应用在军事领域的应用在工业领域的应用推广策略与市场前景PART05技术挑战与解决方案未来发展方向与趋势对未来研究的建议与展望PART06研究成果总结研究不足与局限性对未来研究的建议与展望感谢您的观看

下肢助行外骨骼机器人的控制方法及外骨骼机器人.pdf
本发明提供了一种下肢助行外骨骼机器人的控制方法及外骨骼机器人,其中,控制方法,包括:检测腿部关节的角度;检测外骨骼机器人和用户的整体的质心的位置;检测步行过程中足底的压力,包括右腿足底承受的第一压力F