
一种测量齿轮传动误差的方法.pdf

雨巷****碧易

1/10
2/10

3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种测量齿轮传动误差的方法.pdf
本发明公开了一种测量齿轮传动误差的方法,首先通过一个角速度编码器测量得到主动齿轮的角速度,进而求得角位移;然后将其代入动力学方程中,通过相应的计算,即可求得齿轮的传动误差。本发明可以得到精度较高的传动误差,与传统方法相比,节省了角速度编码器,克服了两个角速度编码器不同步带来的影响,简单方便。
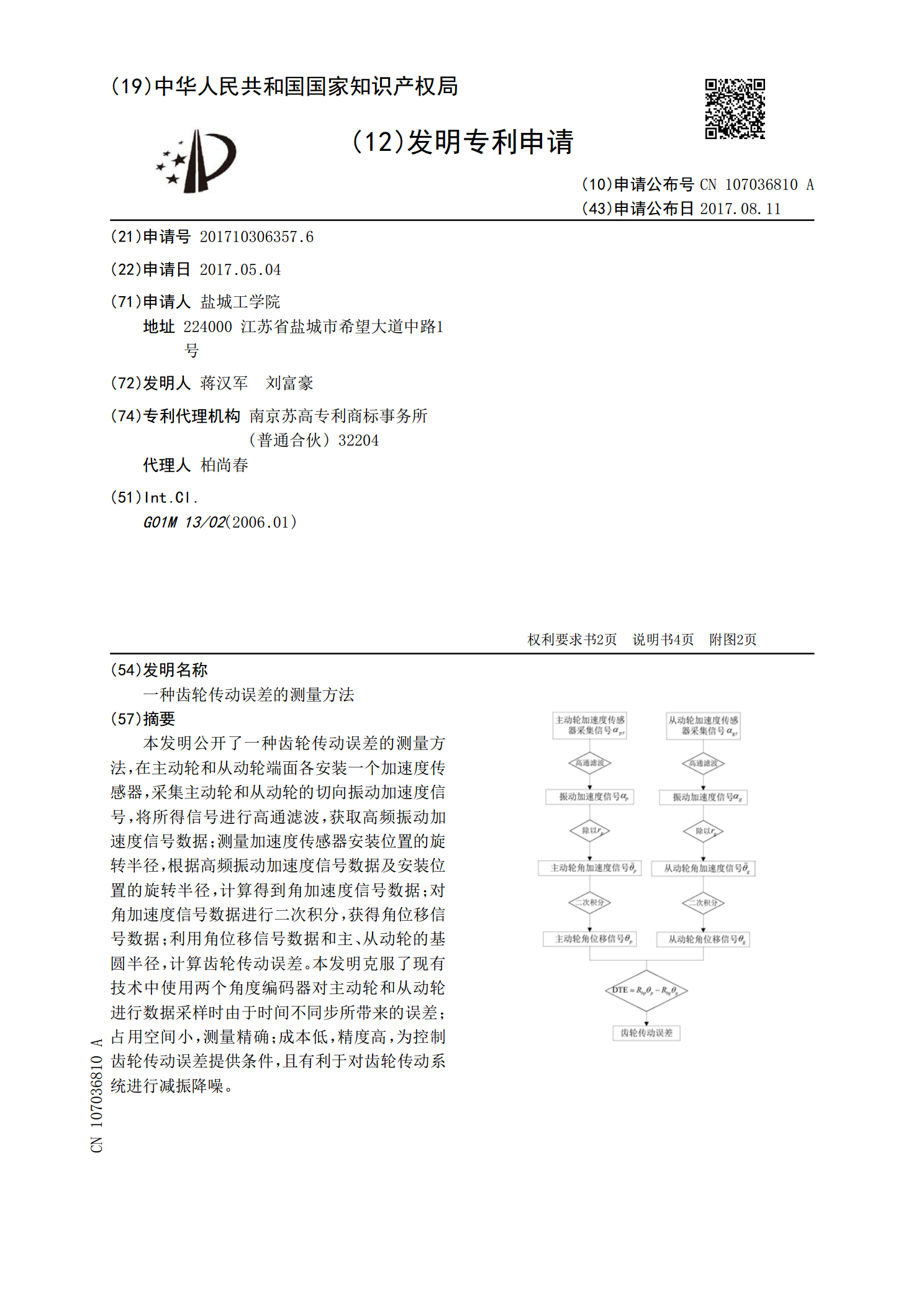
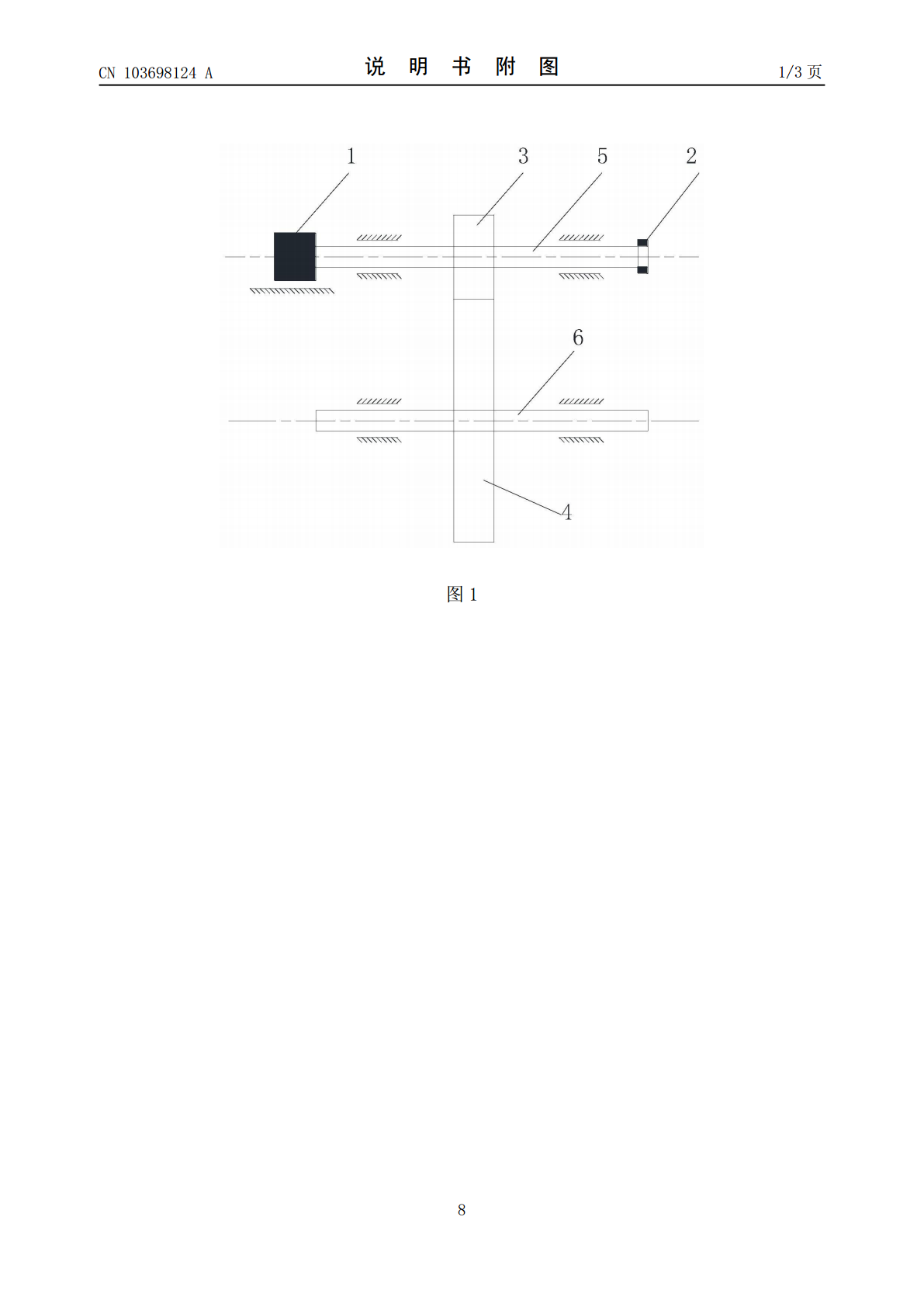
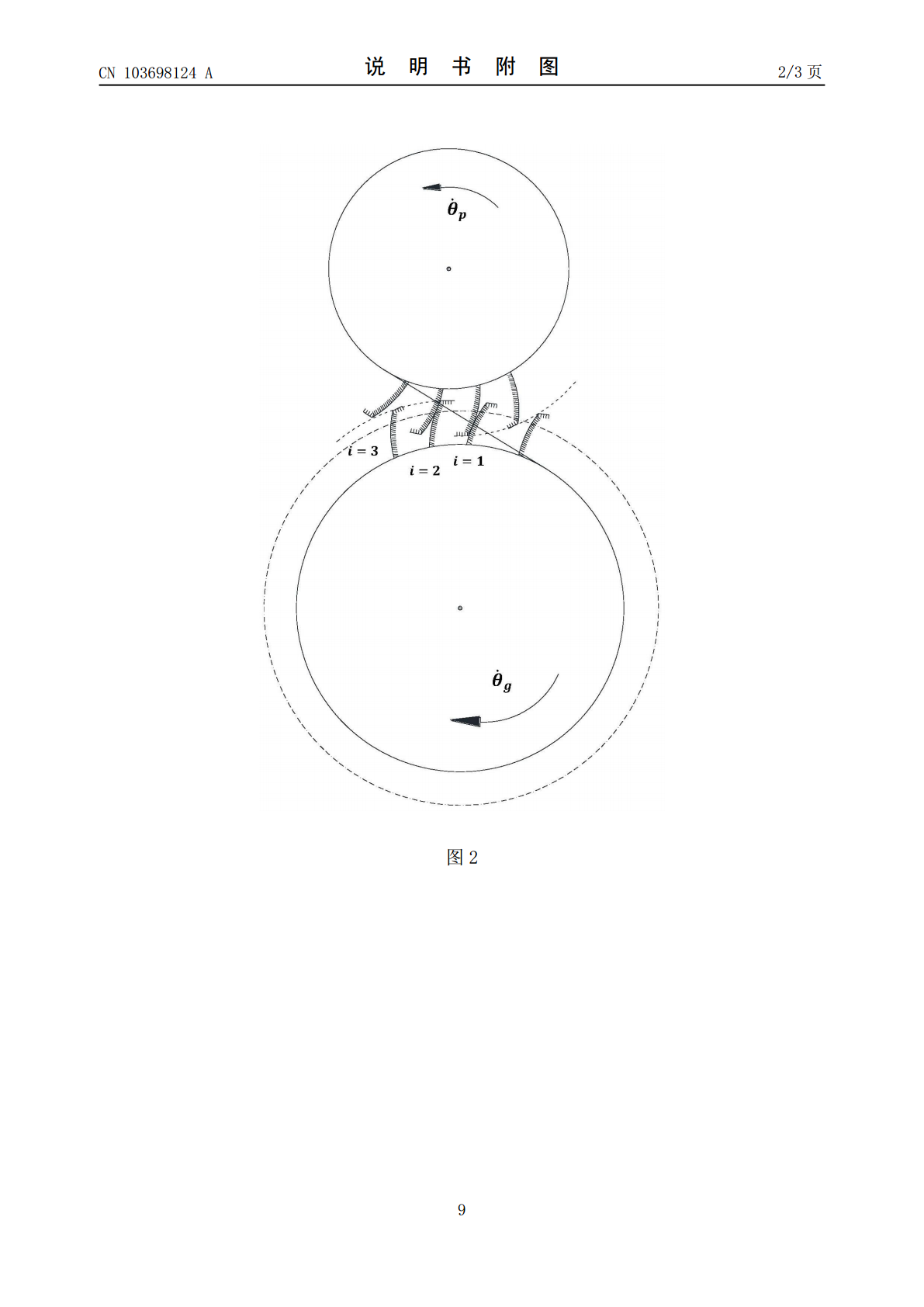
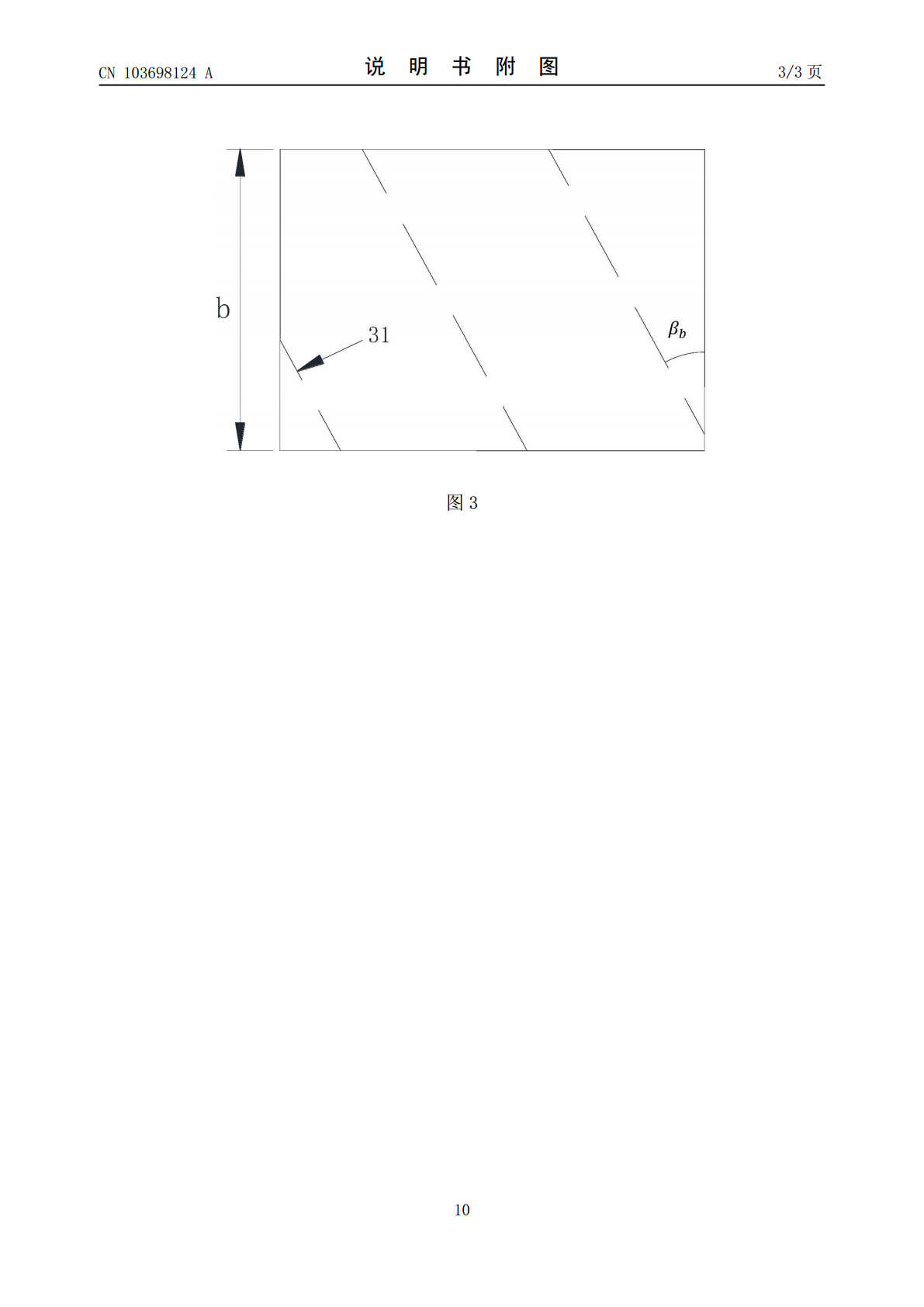
一种齿轮传动误差的测量方法.pdf
本发明公开了一种齿轮传动误差的测量方法,在主动轮和从动轮端面各安装一个加速度传感器,采集主动轮和从动轮的切向振动加速度信号,将所得信号进行高通滤波,获取高频振动加速度信号数据;测量加速度传感器安装位置的旋转半径,根据高频振动加速度信号数据及安装位置的旋转半径,计算得到角加速度信号数据;对角加速度信号数据进行二次积分,获得角位移信号数据;利用角位移信号数据和主、从动轮的基圆半径,计算齿轮传动误差。本发明克服了现有技术中使用两个角度编码器对主动轮和从动轮进行数据采样时由于时间不同步所带来的误差;占用空间小,测
齿轮动态传动误差测量方法及测量装置.pdf
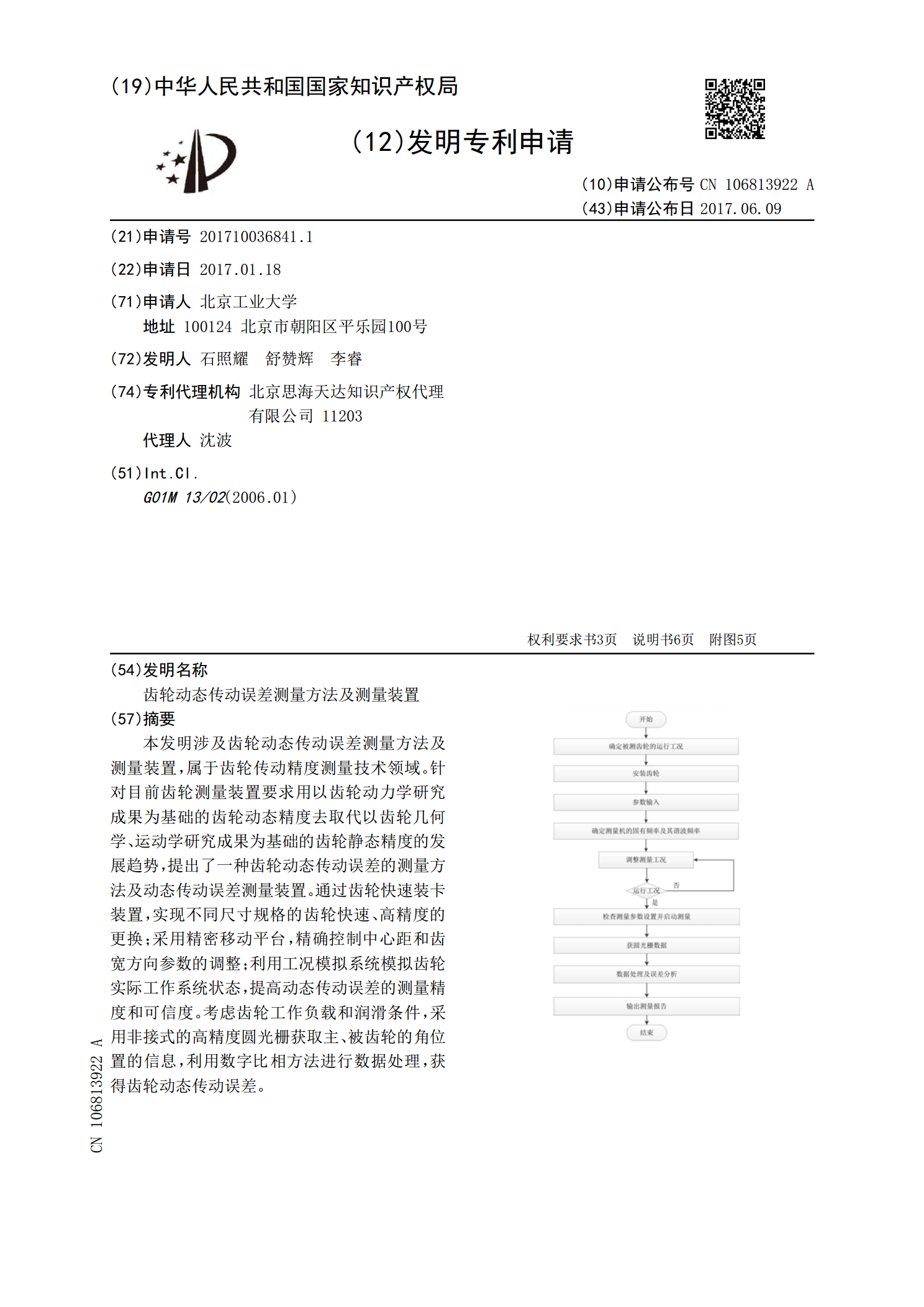
本发明涉及齿轮动态传动误差测量方法及测量装置,属于齿轮传动精度测量技术领域。针对目前齿轮测量装置要求用以齿轮动力学研究成果为基础的齿轮动态精度去取代以齿轮几何学、运动学研究成果为基础的齿轮静态精度的发展趋势,提出了一种齿轮动态传动误差的测量方法及动态传动误差测量装置。通过齿轮快速装卡装置,实现不同尺寸规格的齿轮快速、高精度的更换;采用精密移动平台,精确控制中心距和齿宽方向参数的调整;利用工况模拟系统模拟齿轮实际工作系统状态,提高动态传动误差的测量精度和可信度。考虑齿轮工作负载和润滑条件,采用非接式的高精度
齿轮传动误差测量装置.pdf
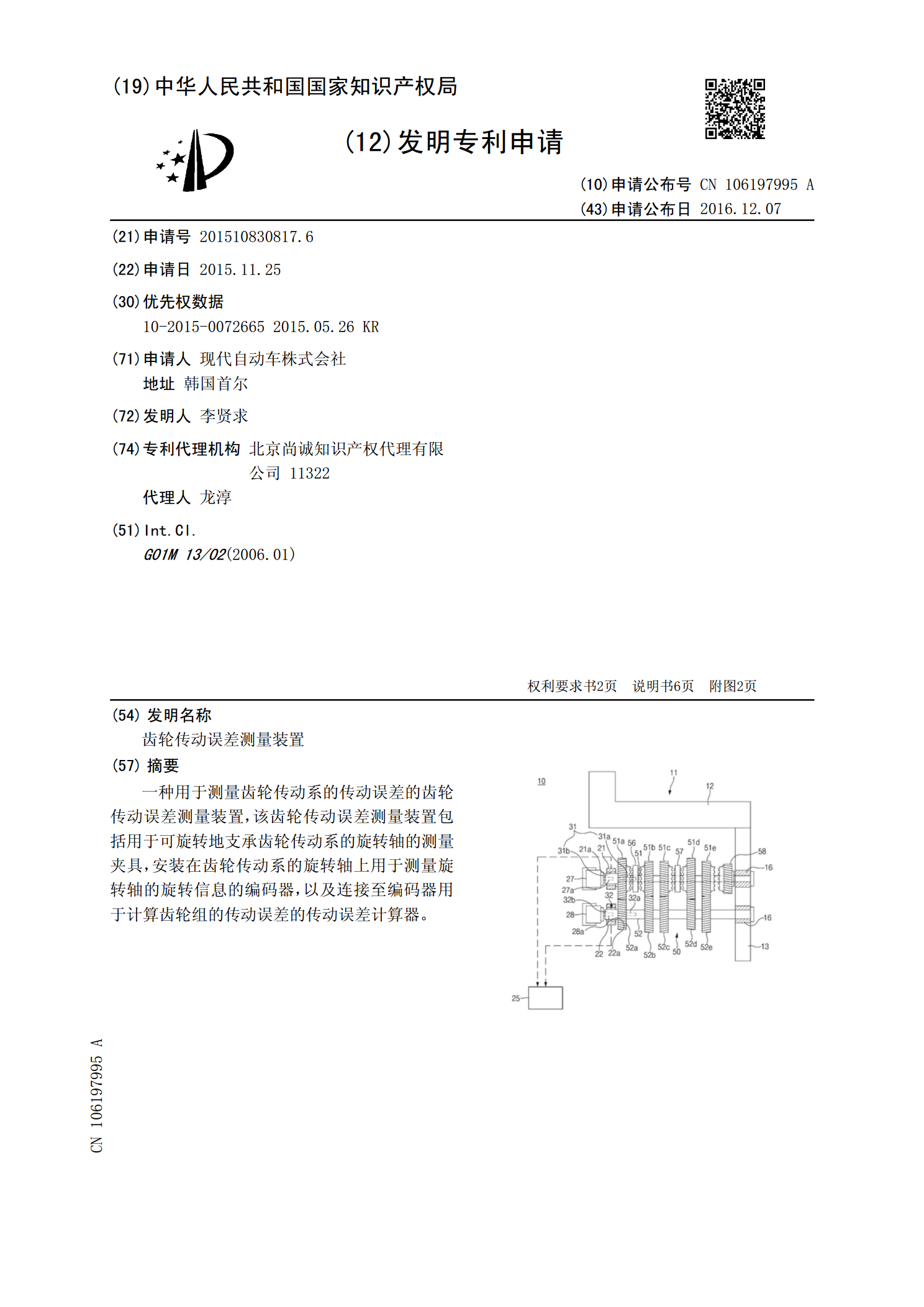
一种用于测量齿轮传动系的传动误差的齿轮传动误差测量装置,该齿轮传动误差测量装置包括用于可旋转地支承齿轮传动系的旋转轴的测量夹具,安装在齿轮传动系的旋转轴上用于测量旋转轴的旋转信息的编码器,以及连接至编码器用于计算齿轮组的传动误差的传动误差计算器。

考虑加工和安装误差的面齿轮传动误差测量仿真分析方法.pdf
本发明公开了考虑加工和安装误差的面齿轮传动误差测量仿真分析方法,包括以下步骤:对无加工误差的标准面齿轮齿面进行建模,求解带有五种加工误差的面齿轮齿面方程;采用TCA分析方法,建立带有加工误差的面齿轮与标准圆柱齿轮传动模型,并加入三种安装误差,面齿轮轴向位移Δq、两轴线相错时两轴线之间最短距离ΔE和面齿轮与圆柱齿轮两轴夹角偏差Δγ;将带有安装误差的面齿轮副传动误差与无安装误差的面齿轮副传动误差做对比,确定面齿轮传动误差测量仪中面齿轮副的最佳安装范围。本发明可以为面齿轮传动误差测量仪中面齿轮副的实际安装提供理