
一种涡轮增压汽油机进气控制方法.pdf

代瑶****zy


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种涡轮增压汽油机进气控制方法.pdf
本发明公开了一种涡轮增压汽油机进气控制方法,旨在减少汽油机电子控制单元的开发中过多标定过程的问题。步骤为:1.节气门开度规划跟踪控制:(1)计算进入气缸的空气流量期望值驾驶员需求扭矩的大小转化为进入汽油机气缸的空气质量流量期望值的大小,由公式得到;(2)计算进气歧管气压期望值根据上一步计算得到的进入气缸空气流量期望值计算进气歧管气压期望值(3)计算期望的节气门开度值,由进气歧管气压期望值并根据节气门流量模型计算期望的节气门开度;(4)进行节气门开度跟踪控制,采用PID控制来实现电子节气门跟踪控制;2.涡轮

一种涡轮增压发动机进气控制方法.pdf
本发明公开了一种涡轮增压发动机进气控制方法,包括根据发动机的需求进气量计算需求进气压力;判断发动机是否启动结束,若否,则禁止使能增压器控制;若是,判断发动机是否存在故障,若是则禁止使能增压器控制,若否,判断需求进气压力是否大于环境压力,在需求进气压力小于环境压力时,采用电子节气门单独控制进气量;在需求进气压力大于环境压力时,使能增压器控制。本发明的优点在于:根据工况不同控制电子节气门和增压器的协同工作,可以有效的保证涡轮增压发动机的进气量,从而保证了在不同增压压力时节气门控制均可以获得需求进气压力。

一种确定涡轮增压汽油机扫气率的方法.pdf
本发明公开了一种确定涡轮增压汽油机扫气率的方法,首先采集涡轮增压汽油机在非扫气工况下的CO、CO2值x

一种1.5L涡轮增压直喷汽油机的进气凸轮.pdf
一种1.5L涡轮增压直喷汽油机的进气凸轮,所述进气凸轮的凸轮型线包括气门开启侧缓冲段、气门关闭侧缓冲段、工作段和基圆段,所述工作段的包角范围108°~120°;气门开启侧和关闭侧缓冲段的夹角都为18°~24°。气门开启侧和关闭侧缓冲段最大高度都在0.25mm以上,型线的最大升程H在7mm~7.5mm内。本进气凸轮经过试验验证,该进气凸轮可以使发动机在中低速扭矩达到280N*m/(1550rpm‑4500rpm),同时,在高速5500rpm时仍然达到额定功率150kW的设计目标。可见该进气凸轮可以确保1.5
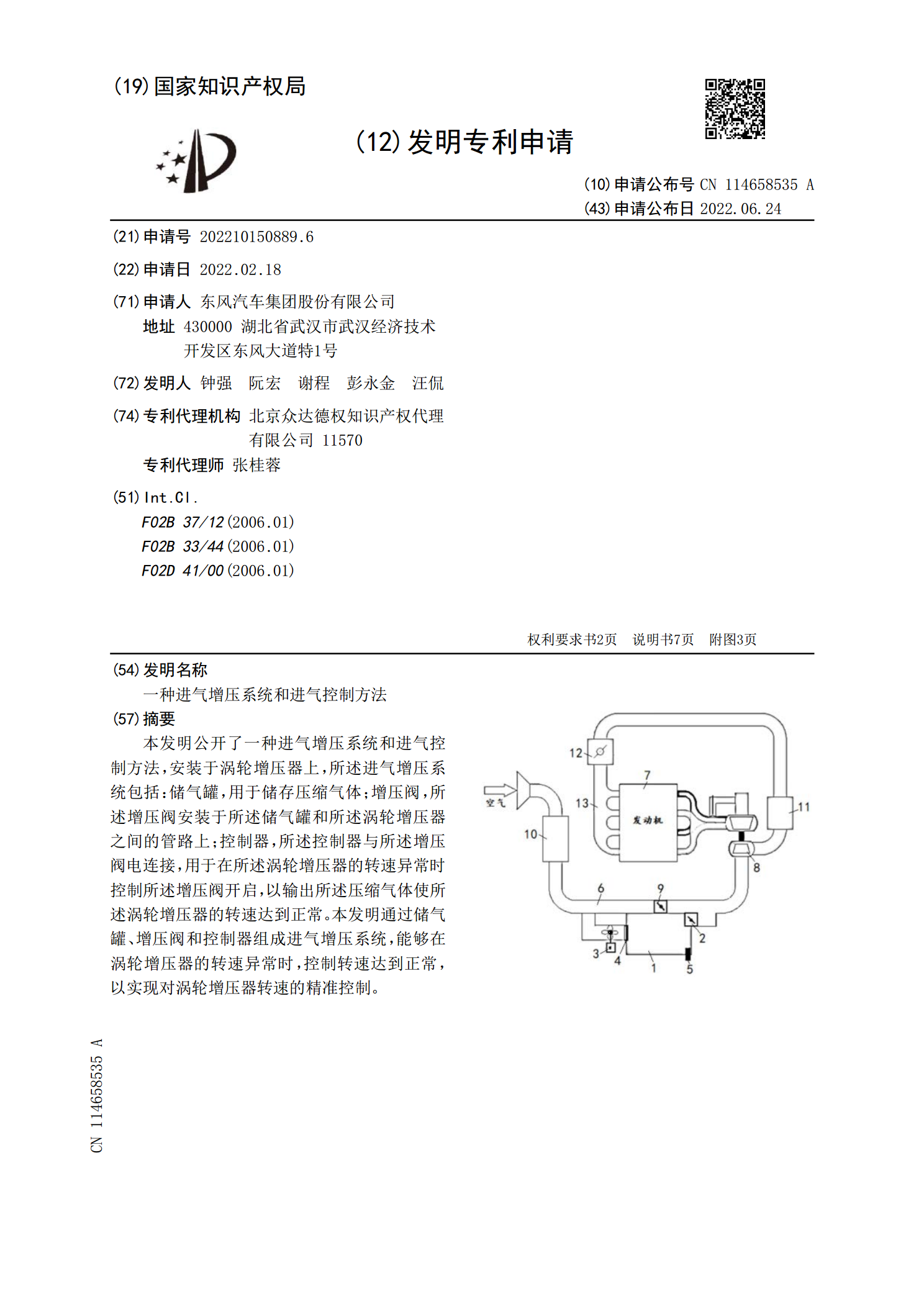
一种进气增压系统和进气控制方法.pdf
本发明公开了一种进气增压系统和进气控制方法,安装于涡轮增压器上,所述进气增压系统包括:储气罐,用于储存压缩气体;增压阀,所述增压阀安装于所述储气罐和所述涡轮增压器之间的管路上;控制器,所述控制器与所述增压阀电连接,用于在所述涡轮增压器的转速异常时控制所述增压阀开启,以输出所述压缩气体使所述涡轮增压器的转速达到正常。本发明通过储气罐、增压阀和控制器组成进气增压系统,能够在涡轮增压器的转速异常时,控制转速达到正常,以实现对涡轮增压器转速的精准控制。