
仿生爪刺式双足爬壁机器人设计与分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

仿生爪刺式双足爬壁机器人设计与分析.pptx
仿生爪刺式双足爬壁机器人设计与分析目录添加章节标题仿生爪刺式双足爬壁机器人的设计理念仿生学的应用爪刺式结构的优势双足行走的稳定性爬壁机器人的适用场景仿生爪刺式双足爬壁机器人的结构设计机械结构设计驱动系统设计传感器系统设计电源系统设计仿生爪刺式双足爬壁机器人的运动性能分析运动学分析动力学分析稳定性分析效率与能耗分析仿生爪刺式双足爬壁机器人的控制策略与算法控制策略设计导航算法实现避障算法实现自适应控制算法实现仿生爪刺式双足爬壁机器人的实验验证与性能评估实验环境搭建实验过程与结果记录性能评估标准与结果分析改进方

仿生爪刺式双足爬壁机器人设计与分析.docx
仿生爪刺式双足爬壁机器人设计与分析Title:DesignandAnalysisofaBiomimeticSpikedDual-LeggedWall-ClimbingRobotAbstract:Wall-climbingrobotshavegainedsignificantattentioninthefieldofroboticsduetotheirpotentialapplicationsinvariousindustriessuchasconstruction,inspection,andmainte

仿生爪刺式双足爬壁机器人设计与分析.docx
仿生爪刺式双足爬壁机器人设计与分析本文将重点介绍一种仿生爪刺式双足爬壁机器人的设计与分析。该机器人的主要功能是在各种墙面上自由爬行,以便在危险或无法人力到达的区域进行探测和救援等工作。本文将从以下几个方面对该机器人进行设计与分析:机器人结构设计、动力系统设计、传感器系统设计、控制系统设计与实现以及机器人实验效果测试。一、机器人结构设计本文提出的仿生爪刺式双足爬壁机器人采用了人类手臂及腿部骨骼结构的设计方法,将机器人设计成一种“双臂双腿”的结构,使得机器人具备类人的运动能力,能够在墙面上自由爬行。机器人主体

爪刺式爬壁机器人仿生机理与系统研究.docx
爪刺式爬壁机器人仿生机理与系统研究一、引言近年来,爬壁机器人在各种领域得到广泛应用,尤其在城市化建设中,对于高空建筑维护、检测和清洗等方面有着不可替代的作用。然而,现有的爬壁机器人在坡度变化、壁面质地不同、爬行速度等方面存在着不足之处,导致其实际应用受到限制。因此,研究一种能够适应各种墙体的爬壁机器人,可有效地弥补现有机器人的不足,也是当前研究的重点之一.本文基于爬壁机器人仿生学机理,通过对其的运动、动力学、控制等方面进行分析研究,提出了一种新型的爬壁机器人爪刺式结构设计,以改善现有爬壁机器人的不足之处,
一种爪刺式履带爬壁机器人.pdf
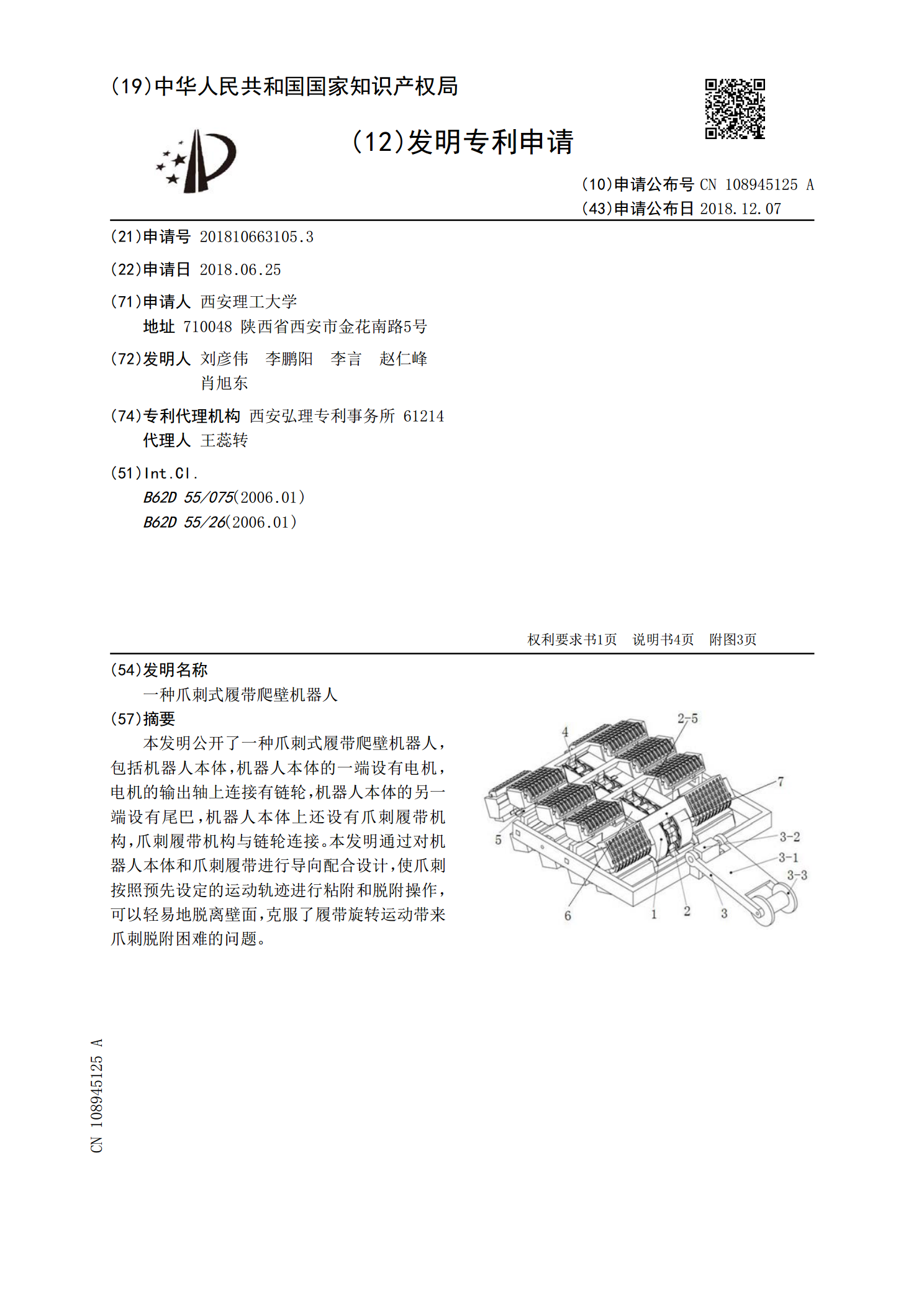
本发明公开了一种爪刺式履带爬壁机器人,包括机器人本体,机器人本体的一端设有电机,电机的输出轴上连接有链轮,机器人本体的另一端设有尾巴,机器人本体上还设有爪刺履带机构,爪刺履带机构与链轮连接。本发明通过对机器人本体和爪刺履带进行导向配合设计,使爪刺按照预先设定的运动轨迹进行粘附和脱附操作,可以轻易地脱离壁面,克服了履带旋转运动带来爪刺脱附困难的问题。