
定位机械臂.pdf

是你****平呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

定位机械臂.pdf
本发明提供了一种定位机械臂。该定位机械臂包括尾轮组件(100)、大臂(200)、中带轮组件(300)、小臂(400)、前轮组件(500)、升降臂(600)和小连接臂(700)七部分。该定位机械臂采用一个抱闸同时锁死多个转动关节的方式,解决了单抱闸锁死单个转动关节的局限性,降低了多个抱闸带来的累积间隙,并使机械臂整体质量减轻,操作精度提高。
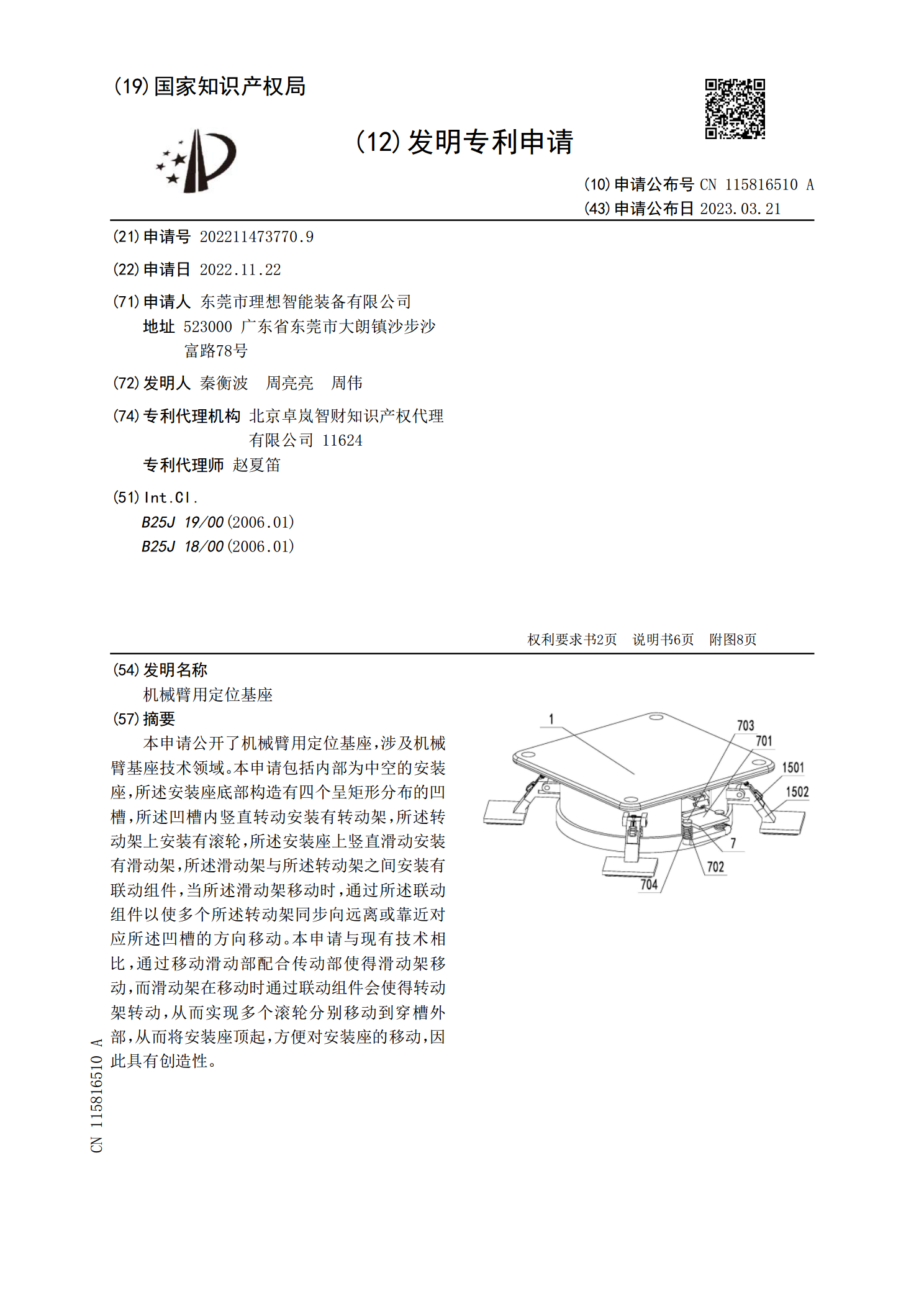
机械臂用定位基座.pdf
本申请公开了机械臂用定位基座,涉及机械臂基座技术领域。本申请包括内部为中空的安装座,所述安装座底部构造有四个呈矩形分布的凹槽,所述凹槽内竖直转动安装有转动架,所述转动架上安装有滚轮,所述安装座上竖直滑动安装有滑动架,所述滑动架与所述转动架之间安装有联动组件,当所述滑动架移动时,通过所述联动组件以使多个所述转动架同步向远离或靠近对应所述凹槽的方向移动。本申请与现有技术相比,通过移动滑动部配合传动部使得滑动架移动,而滑动架在移动时通过联动组件会使得转动架转动,从而实现多个滚轮分别移动到穿槽外部,从而将安装座顶
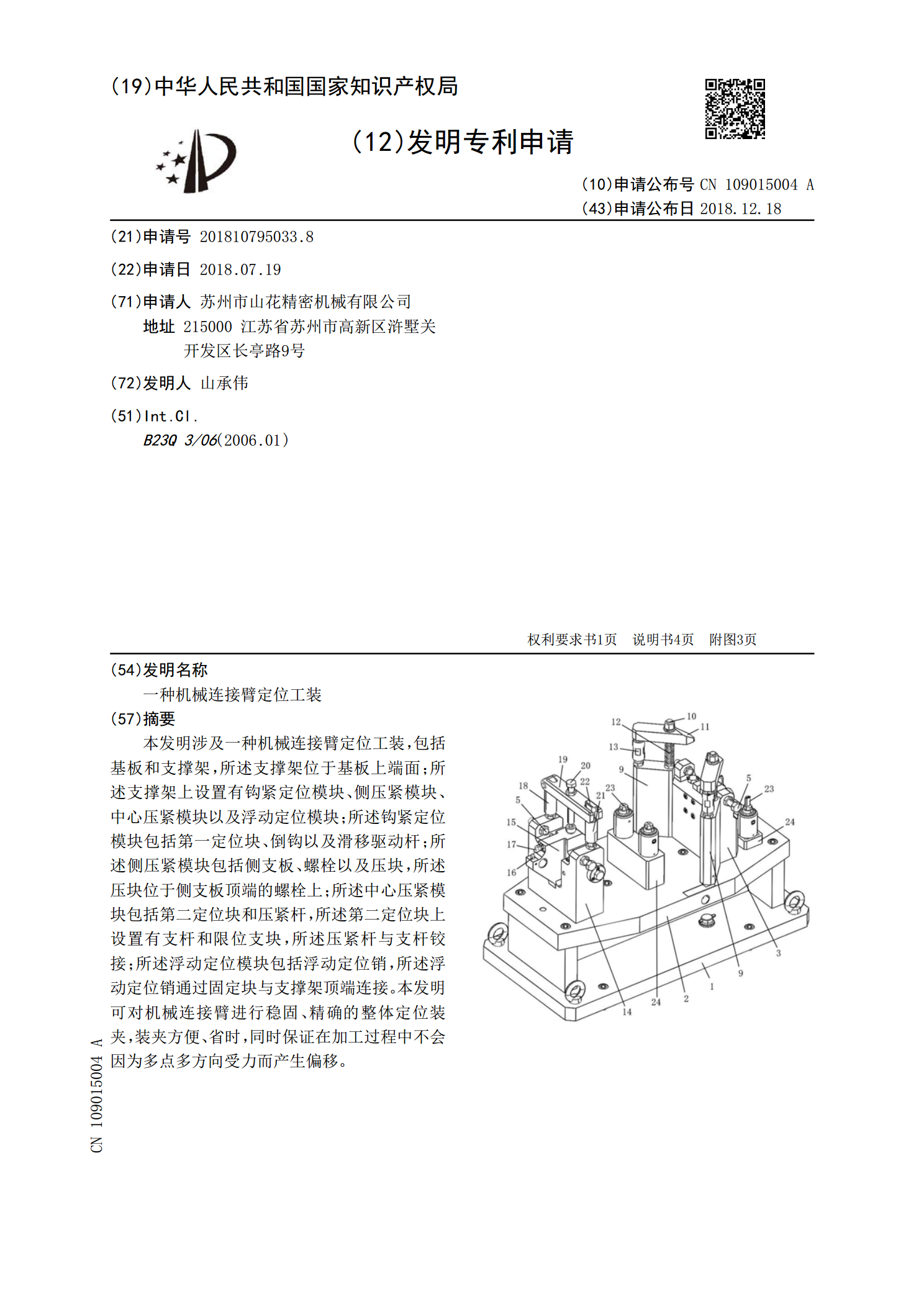
一种机械连接臂定位工装.pdf
本发明涉及一种机械连接臂定位工装,包括基板和支撑架,所述支撑架位于基板上端面;所述支撑架上设置有钩紧定位模块、侧压紧模块、中心压紧模块以及浮动定位模块;所述钩紧定位模块包括第一定位块、倒钩以及滑移驱动杆;所述侧压紧模块包括侧支板、螺栓以及压块,所述压块位于侧支板顶端的螺栓上;所述中心压紧模块包括第二定位块和压紧杆,所述第二定位块上设置有支杆和限位支块,所述压紧杆与支杆铰接;所述浮动定位模块包括浮动定位销,所述浮动定位销通过固定块与支撑架顶端连接。本发明可对机械连接臂进行稳固、精确的整体定位装夹,装夹方便、
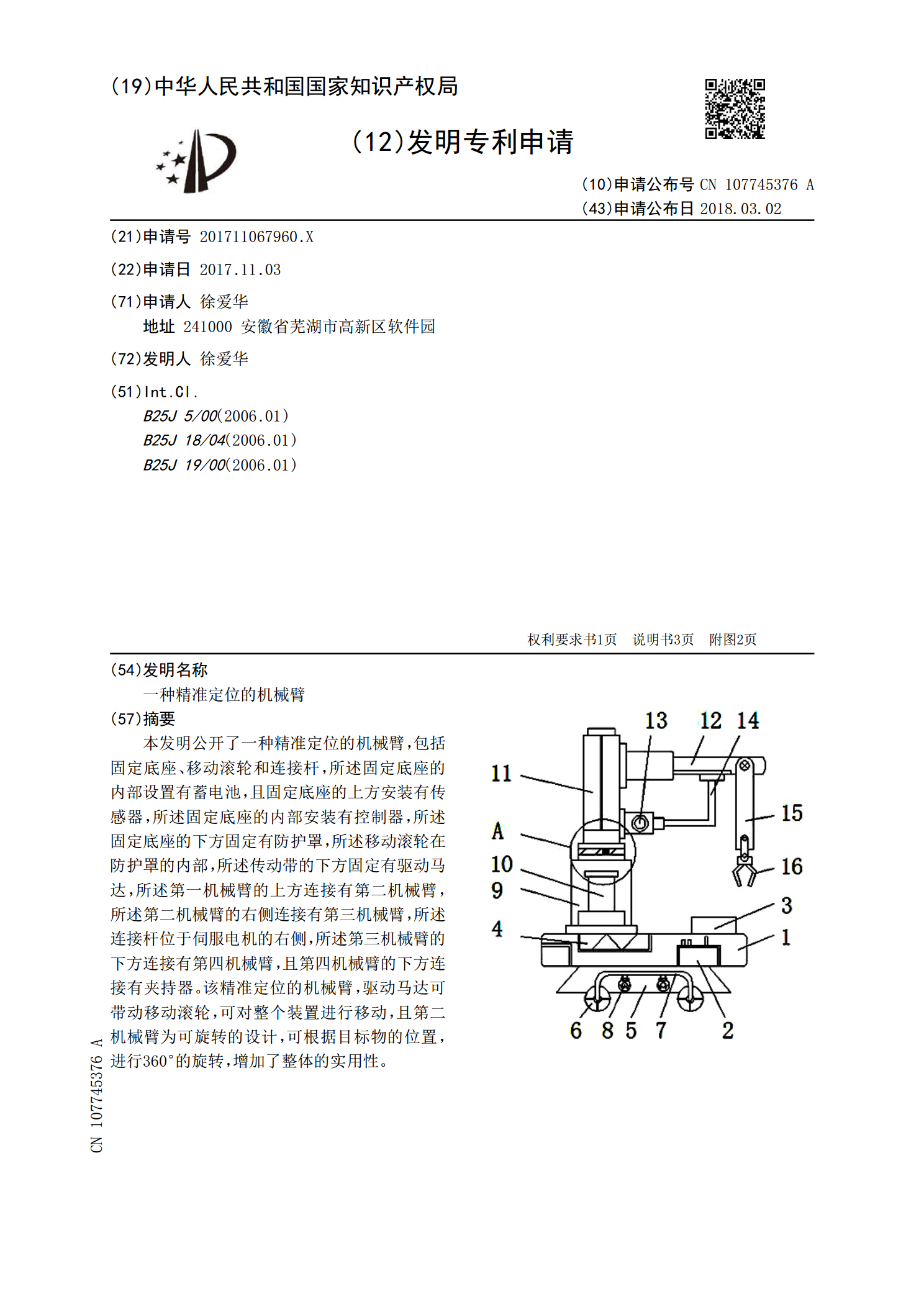
一种精准定位的机械臂.pdf
本发明公开了一种精准定位的机械臂,包括固定底座、移动滚轮和连接杆,所述固定底座的内部设置有蓄电池,且固定底座的上方安装有传感器,所述固定底座的内部安装有控制器,所述固定底座的下方固定有防护罩,所述移动滚轮在防护罩的内部,所述传动带的下方固定有驱动马达,所述第一机械臂的上方连接有第二机械臂,所述第二机械臂的右侧连接有第三机械臂,所述连接杆位于伺服电机的右侧,所述第三机械臂的下方连接有第四机械臂,且第四机械臂的下方连接有夹持器。该精准定位的机械臂,驱动马达可带动移动滚轮,可对整个装置进行移动,且第二机械臂为可

基于CICP的机械臂多目标定位与抓取.docx
基于CICP的机械臂多目标定位与抓取摘要本文提出了一种基于CICP的机械臂多目标定位与抓取的方法。该方法通过对激光点云数据进行处理,得到了目标物体的三维坐标信息。同时,利用机械臂的运动控制技术,实现了对目标物体的定位和抓取操作。实验结果表明,该方法能够实现高效、准确的多目标定位和抓取,具有重要的应用价值。关键词:CICP;机械臂;多目标定位;抓取引言机械臂在工业自动化生产中具有重要的应用价值。机械臂的定位和抓取是机械臂应用的关键技术,对于自动化生产线的高效运作和优化生产效率具有重要的意义。然而,由于传统方