
一种机械连接臂定位工装.pdf

努力****凌芹


1/9

2/9
3/9

4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机械连接臂定位工装.pdf
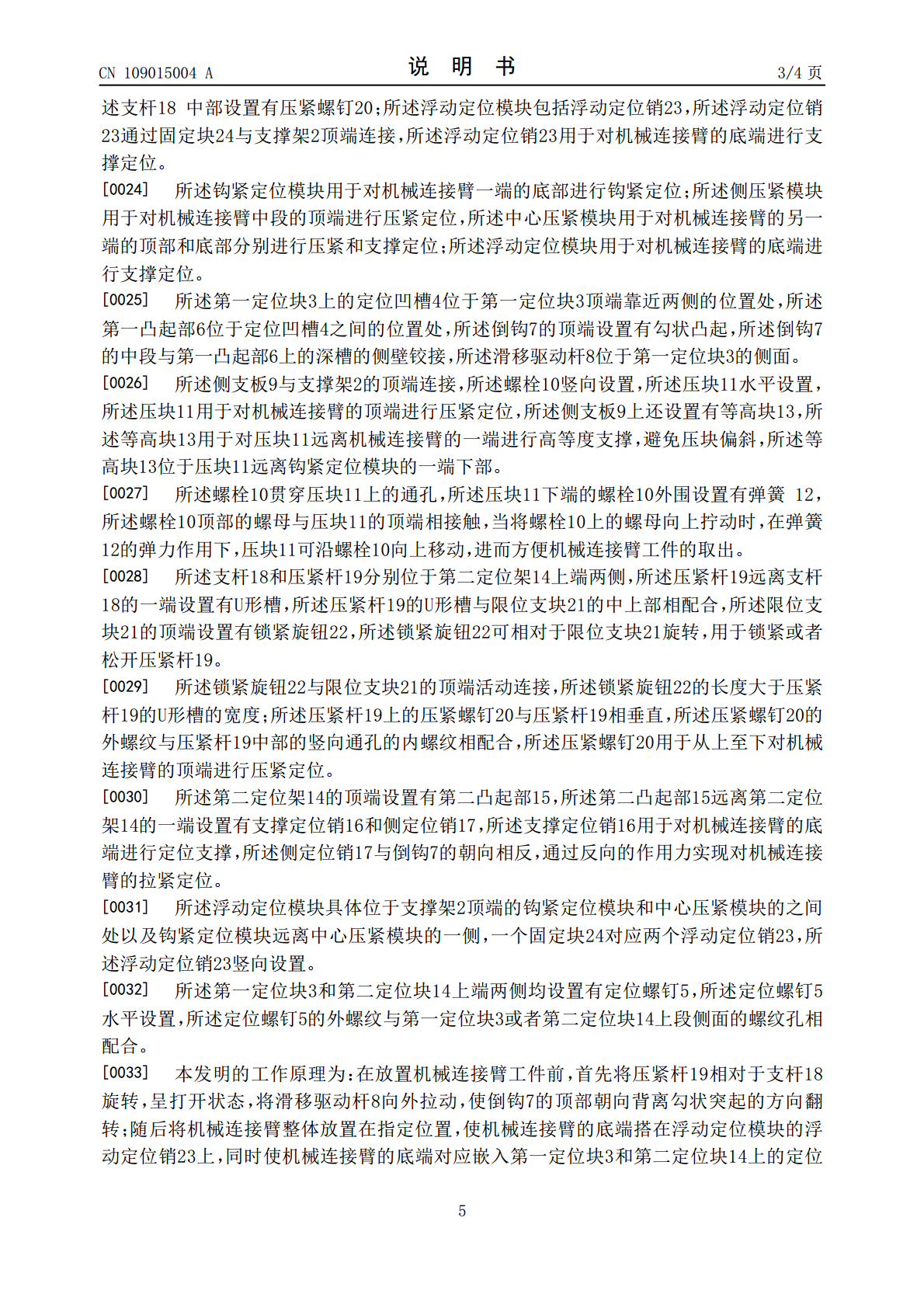
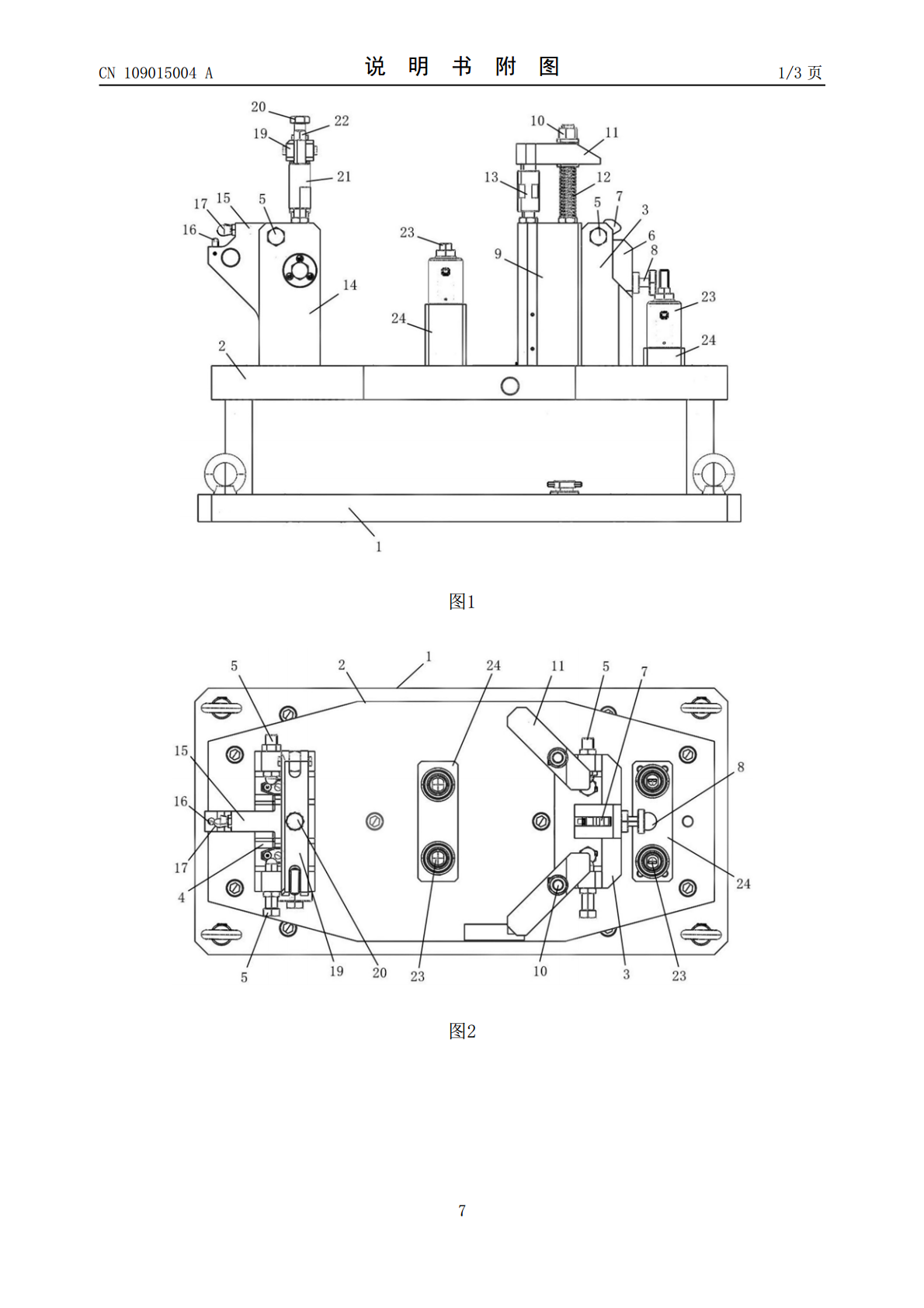
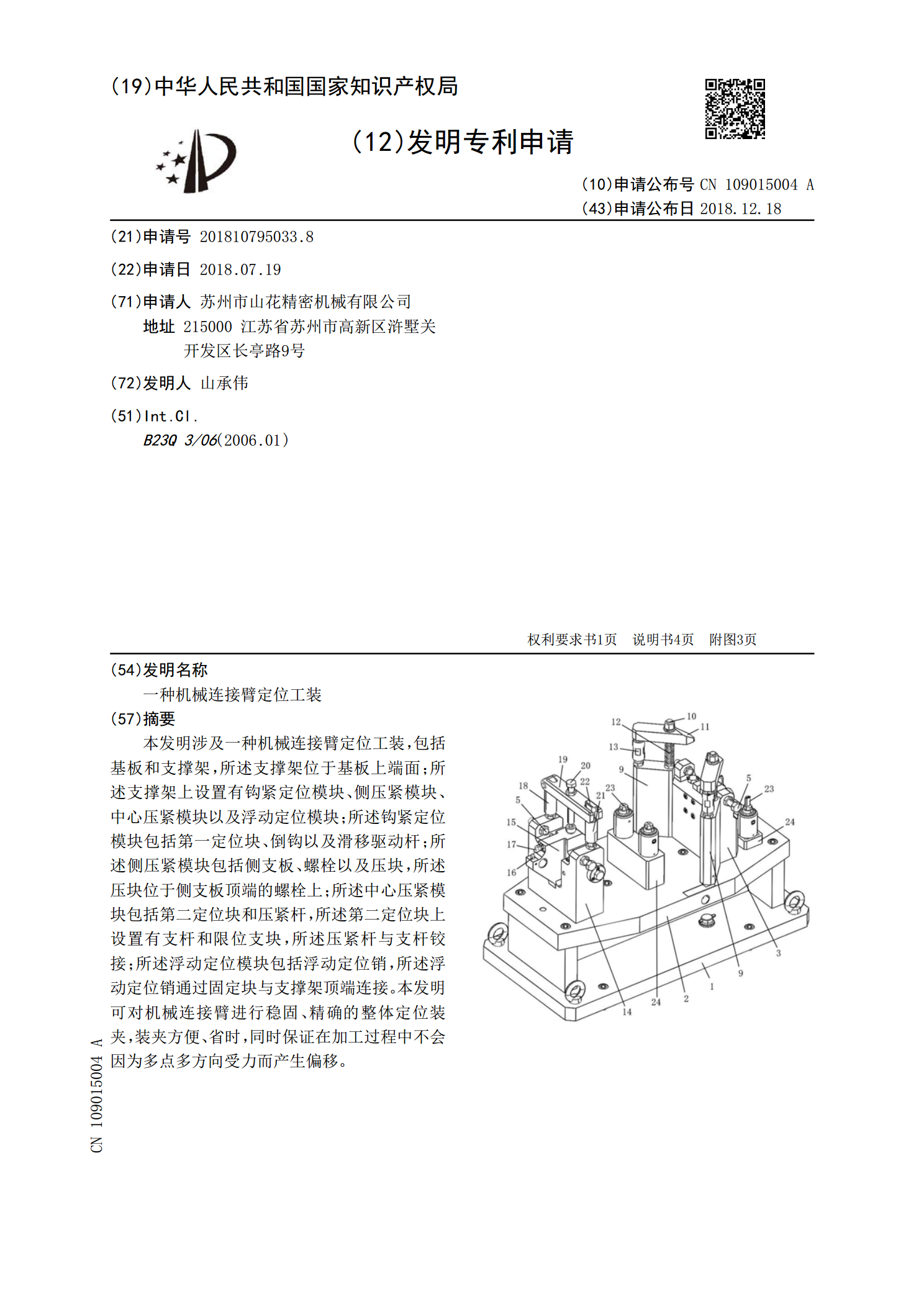
本发明涉及一种机械连接臂定位工装,包括基板和支撑架,所述支撑架位于基板上端面;所述支撑架上设置有钩紧定位模块、侧压紧模块、中心压紧模块以及浮动定位模块;所述钩紧定位模块包括第一定位块、倒钩以及滑移驱动杆;所述侧压紧模块包括侧支板、螺栓以及压块,所述压块位于侧支板顶端的螺栓上;所述中心压紧模块包括第二定位块和压紧杆,所述第二定位块上设置有支杆和限位支块,所述压紧杆与支杆铰接;所述浮动定位模块包括浮动定位销,所述浮动定位销通过固定块与支撑架顶端连接。本发明可对机械连接臂进行稳固、精确的整体定位装夹,装夹方便、
一种新型机械炉排滑动架摆臂定位工装.pdf
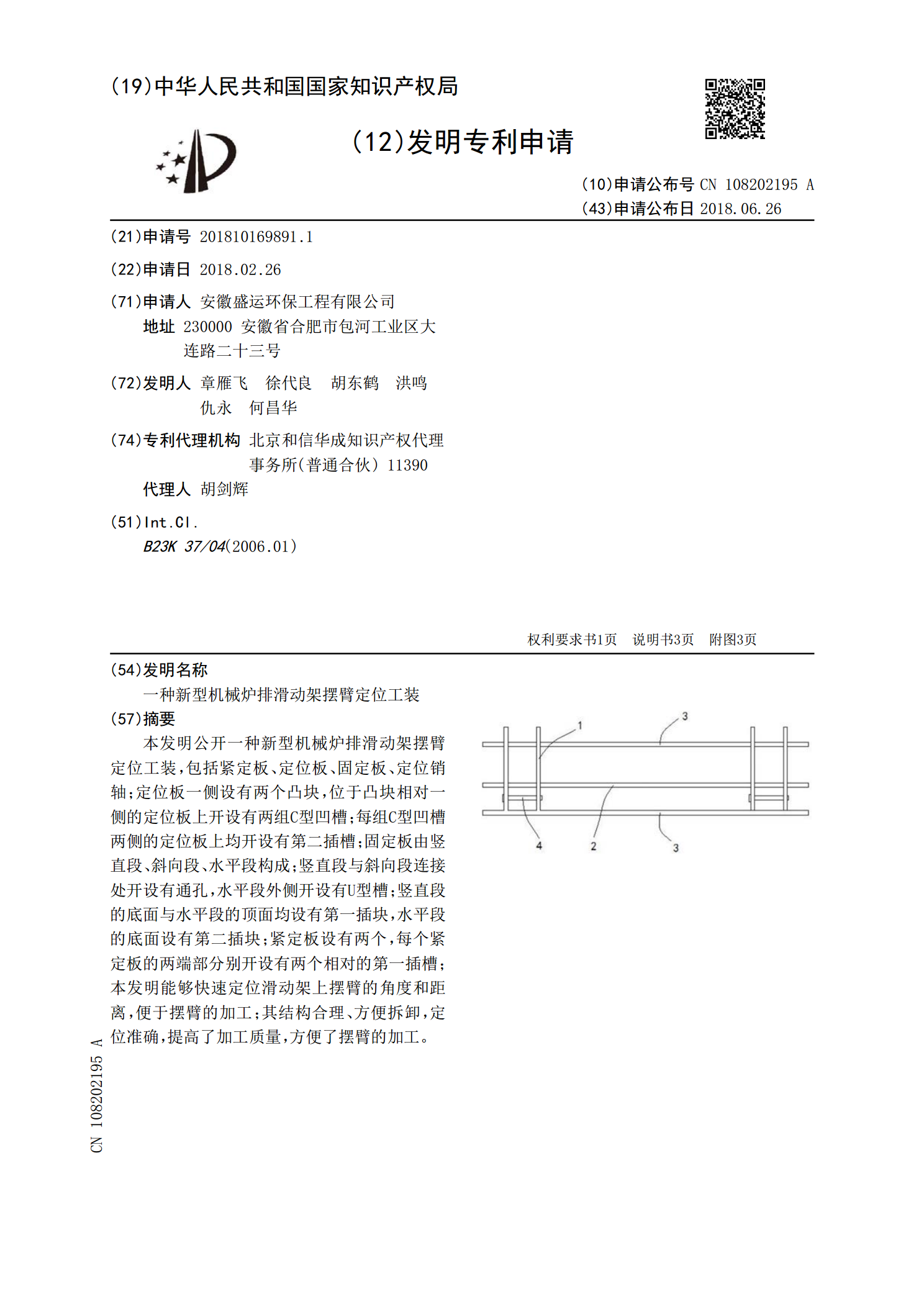
本发明公开一种新型机械炉排滑动架摆臂定位工装,包括紧定板、定位板、固定板、定位销轴;定位板一侧设有两个凸块,位于凸块相对一侧的定位板上开设有两组C型凹槽;每组C型凹槽两侧的定位板上均开设有第二插槽;固定板由竖直段、斜向段、水平段构成;竖直段与斜向段连接处开设有通孔,水平段外侧开设有U型槽;竖直段的底面与水平段的顶面均设有第一插块,水平段的底面设有第二插块;紧定板设有两个,每个紧定板的两端部分别开设有两个相对的第一插槽;本发明能够快速定位滑动架上摆臂的角度和距离,便于摆臂的加工;其结构合理、方便拆卸,定位准

叶片腹板定位工装用定位大臂.pdf
本发明涉及一种叶片腹板定位工装用定位大臂,其成对安装于叶片腹板定位工装的主体钢架上,该定位大臂包括在展开支撑位置和收拢存储位置间可转动地固定于主体钢架上的大臂钢架、和包括定位顶升装置、三向可调腿座和大臂基座的可伸缩定位臂,三向可调腿座上端设有顶升对接底座,定位顶升装置安装于大臂钢架上并具有可伸缩顶杆,可伸缩顶杆接收在顶升对接底座上并能在向下伸出位置和向上缩回位置之间伸缩活动。本发明的可伸缩定位臂可借助于定位顶升装置进行伸长或缩短,强度高、耐冲击且稳定性好,同时可借助于三向可调腿座来实现上下、前后、左右三个
一种机械定位工装.pdf
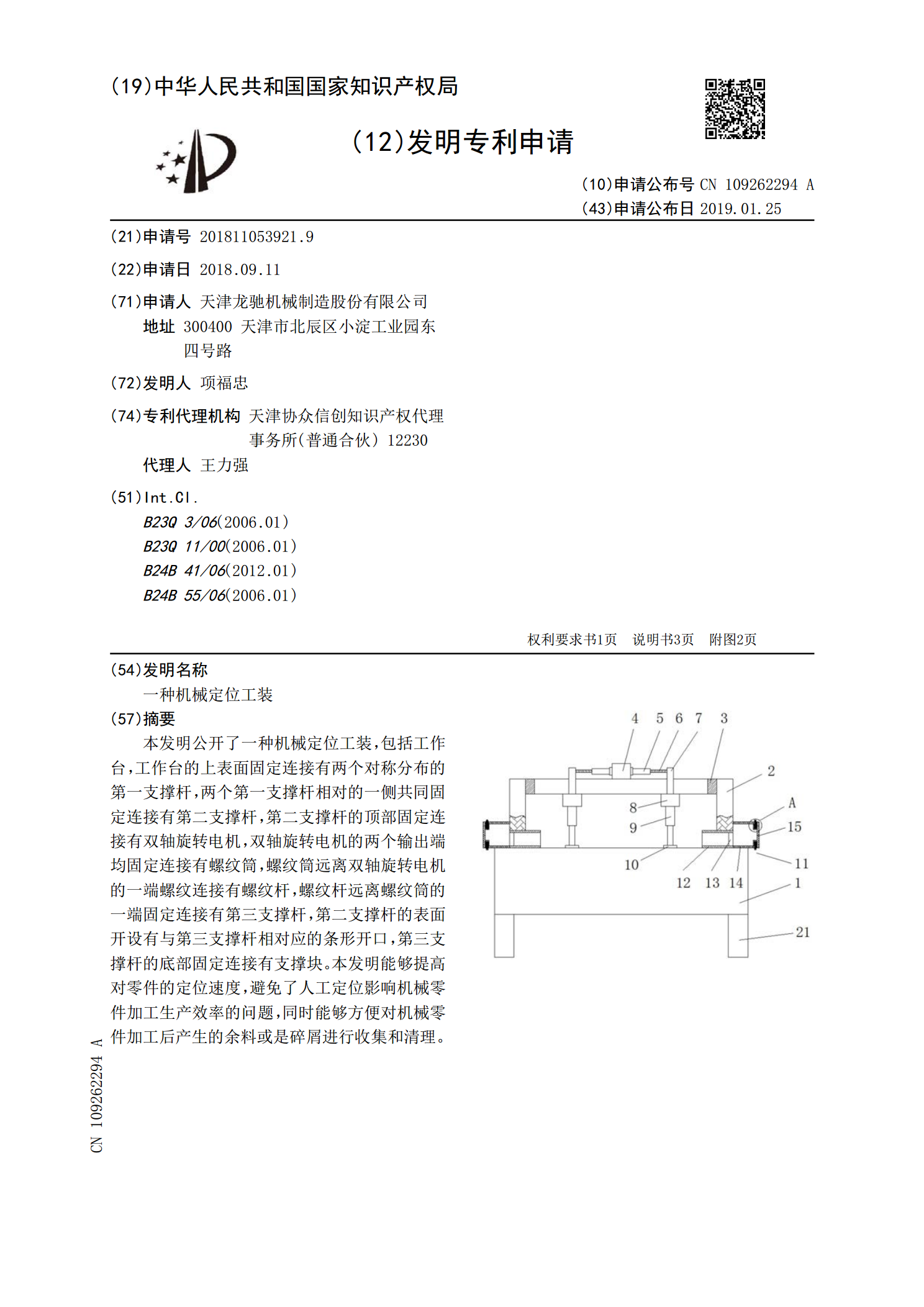
本发明公开了一种机械定位工装,包括工作台,工作台的上表面固定连接有两个对称分布的第一支撑杆,两个第一支撑杆相对的一侧共同固定连接有第二支撑杆,第二支撑杆的顶部固定连接有双轴旋转电机,双轴旋转电机的两个输出端均固定连接有螺纹筒,螺纹筒远离双轴旋转电机的一端螺纹连接有螺纹杆,螺纹杆远离螺纹筒的一端固定连接有第三支撑杆,第二支撑杆的表面开设有与第三支撑杆相对应的条形开口,第三支撑杆的底部固定连接有支撑块。本发明能够提高对零件的定位速度,避免了人工定位影响机械零件加工生产效率的问题,同时能够方便对机械零件加工后产
一种机械臂的移动连接底座.pdf
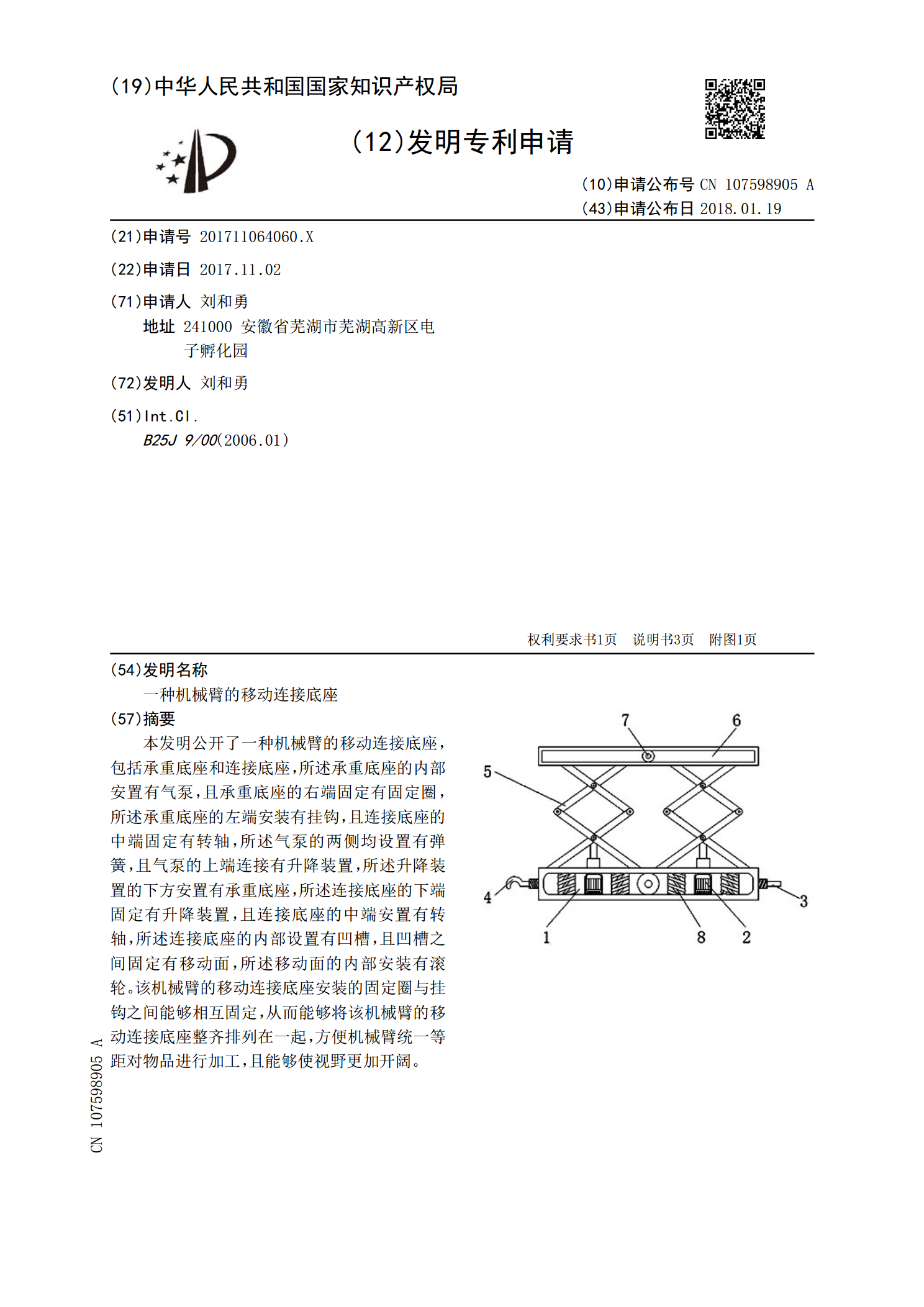
本发明公开了一种机械臂的移动连接底座,包括承重底座和连接底座,所述承重底座的内部安置有气泵,且承重底座的右端固定有固定圈,所述承重底座的左端安装有挂钩,且连接底座的中端固定有转轴,所述气泵的两侧均设置有弹簧,且气泵的上端连接有升降装置,所述升降装置的下方安置有承重底座,所述连接底座的下端固定有升降装置,且连接底座的中端安置有转轴,所述连接底座的内部设置有凹槽,且凹槽之间固定有移动面,所述移动面的内部安装有滚轮。该机械臂的移动连接底座安装的固定圈与挂钩之间能够相互固定,从而能够将该机械臂的移动连接底座整齐排