
带行走状态判断装置的自移动机器人及行走状态判断方法.pdf

Ch****75


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

带行走状态判断装置的自移动机器人及行走状态判断方法.pdf
一种带行走状态判断装置的自移动机器人,包括自移动机器人本体,本体上设有行走状态判断装置,该装置包括驱动轮组件和微控制单元,驱动轮组件包含驱动电机和驱动轮,该装置还包括设置在本体上的随动轮组件(100),驱动轮组件和随动轮组件分别采集自移动机器人驱动轮和随动轮的运动信号,并将采集到的驱动轮和随动轮的运动信号回传给微控制单元;微控制单元根据所述驱动轮运动信号和随动轮运动信号,判断自移动机器人的行走状态。本发明结构简单紧凑,自移动机器人体积小巧、制造成本低廉;判断准确灵敏,提高了自移动机器人的工作效率。

一种带行走状态判断随动装置及方法.pdf
本发明属于小家电制造技术领域,公开一种带行走状态判断随动装置及方法,该装置包括:码盘、浮动板、中心轴、光耦、支架、随动轮、从动轴、皮带,所述随动轮轴通过皮带与垂直向的从动轴皮带传动连接,所述随动轮与中心轴之间设置有第一轴承,用于减小摩擦;中心轴固定在旋转360度的支架上,支架通过第二轴承与浮动板连接一起;所述码盘固定在从动轴上,从动轴与浮动板之间设置有第三轴承;固定在浮动板上的光耦通过导线与单片机系统相连。本发明能够与驱动电机和驱动轮以及单片机系统组成整体的带行走状态判断装置的自移动机器人,以实现多方向自
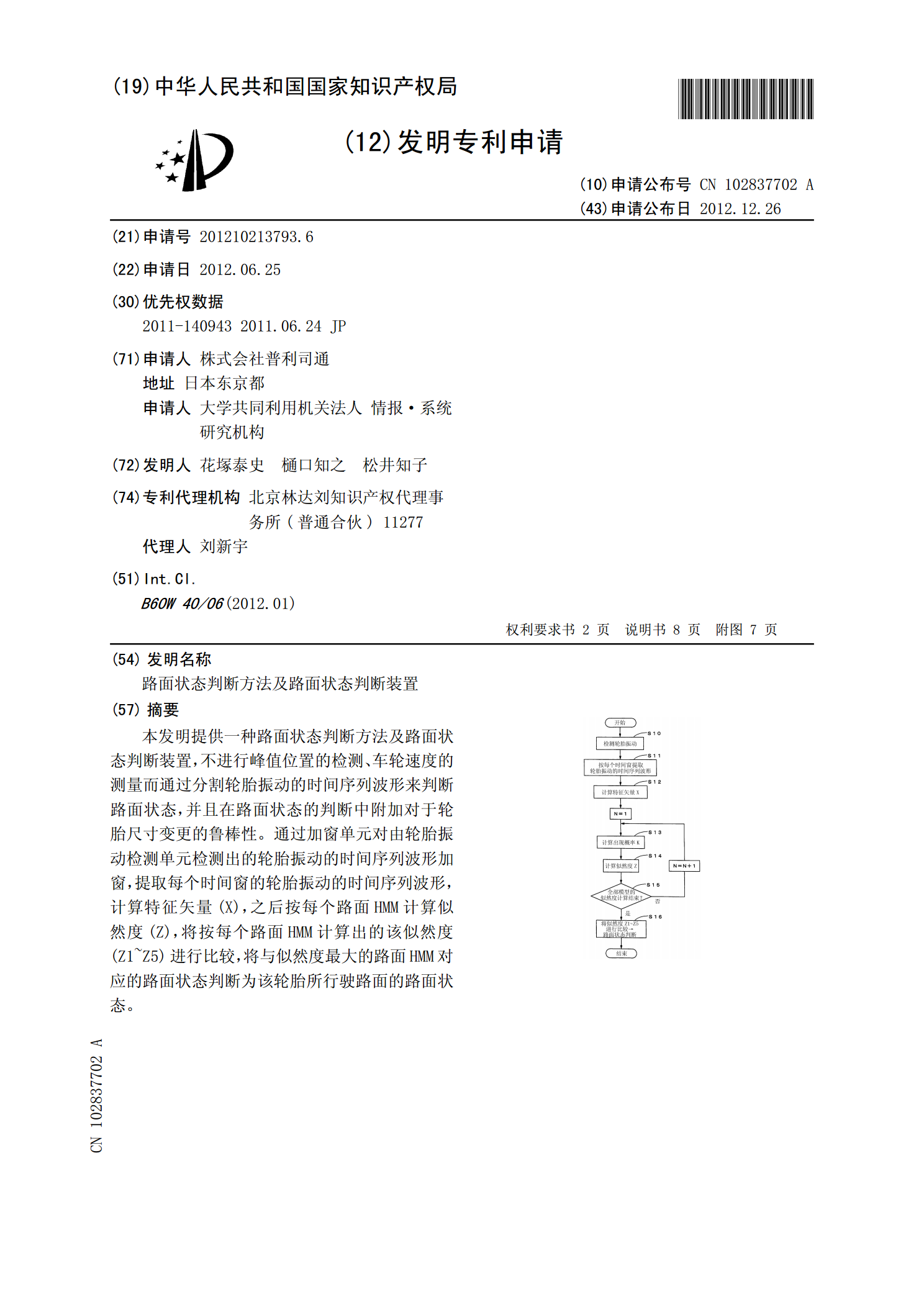
路面状态判断方法及路面状态判断装置.pdf
本发明提供一种路面状态判断方法及路面状态判断装置,不进行峰值位置的检测、车轮速度的测量而通过分割轮胎振动的时间序列波形来判断路面状态,并且在路面状态的判断中附加对于轮胎尺寸变更的鲁棒性。通过加窗单元对由轮胎振动检测单元检测出的轮胎振动的时间序列波形加窗,提取每个时间窗的轮胎振动的时间序列波形,计算特征矢量(X),之后按每个路面HMM计算似然度(Z),将按每个路面HMM计算出的该似然度(Z1~Z5)进行比较,将与似然度最大的路面HMM对应的路面状态判断为该轮胎所行驶路面的路面状态。
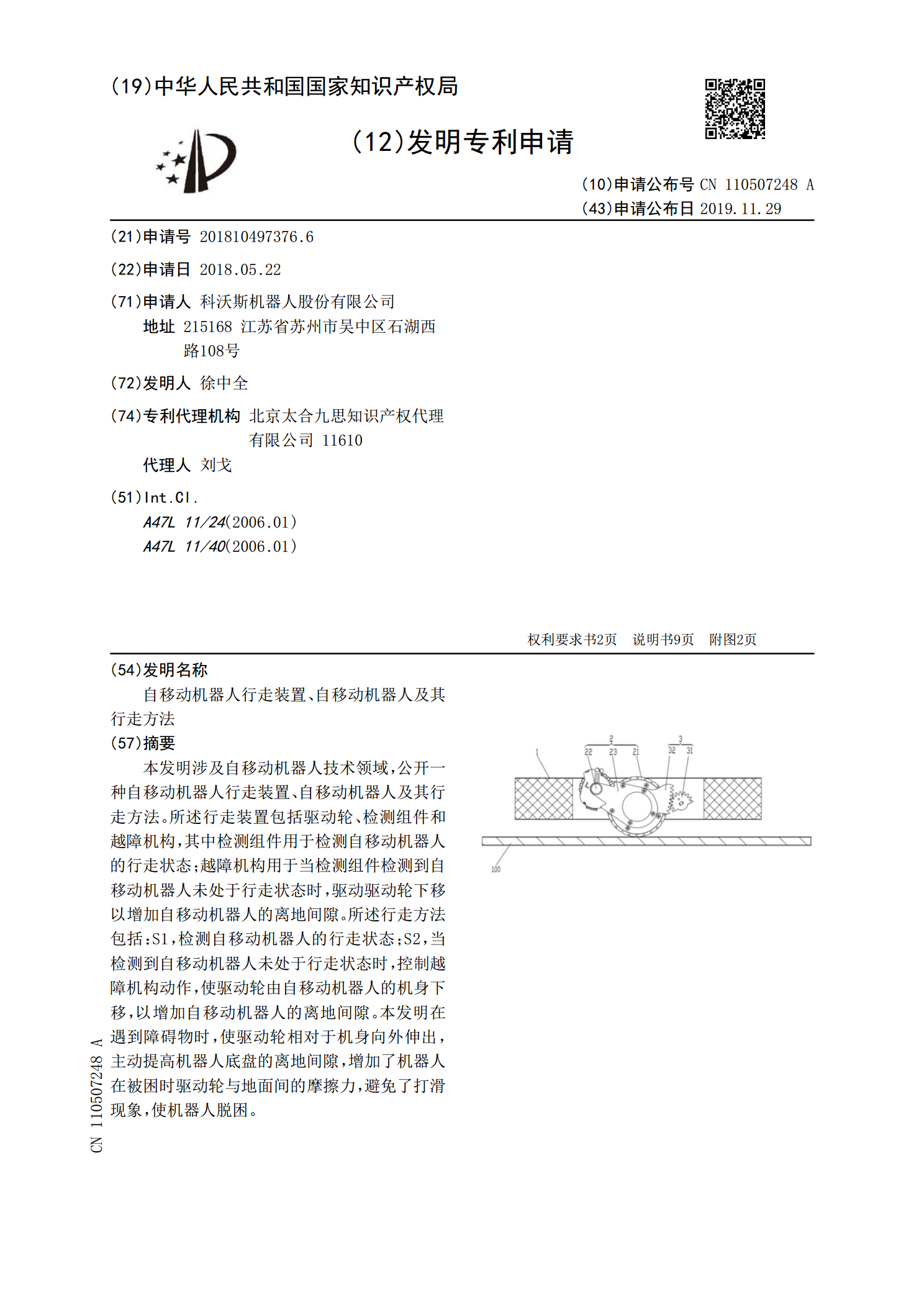
自移动机器人行走装置、自移动机器人及其行走方法.pdf
本发明涉及自移动机器人技术领域,公开一种自移动机器人行走装置、自移动机器人及其行走方法。所述行走装置包括驱动轮、检测组件和越障机构,其中检测组件用于检测自移动机器人的行走状态;越障机构用于当检测组件检测到自移动机器人未处于行走状态时,驱动驱动轮下移以增加自移动机器人的离地间隙。所述行走方法包括:S1,检测自移动机器人的行走状态;S2,当检测到自移动机器人未处于行走状态时,控制越障机构动作,使驱动轮由自移动机器人的机身下移,以增加自移动机器人的离地间隙。本发明在遇到障碍物时,使驱动轮相对于机身向外伸出,主动

自移动机器人行走方法与装置.pdf
本发明旨在提供一种自移动机器人自由切换成直线行走和沿障碍物行走的行走方式,其利用廉价的普通传感器和微处理器来实现自移动机器人的行走,从而使得行走过程真正的有规律,提高行走区域的覆盖率,降低行走重复率,并能判断是否清扫完成,降低系统能耗,延长系统有效工作寿命。