
电动助力转向系统.pdf

淑然****by


1/8

2/8

3/8

4/8
5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于电动助力转向系统的齿条、电动助力转向系统和车辆.pdf
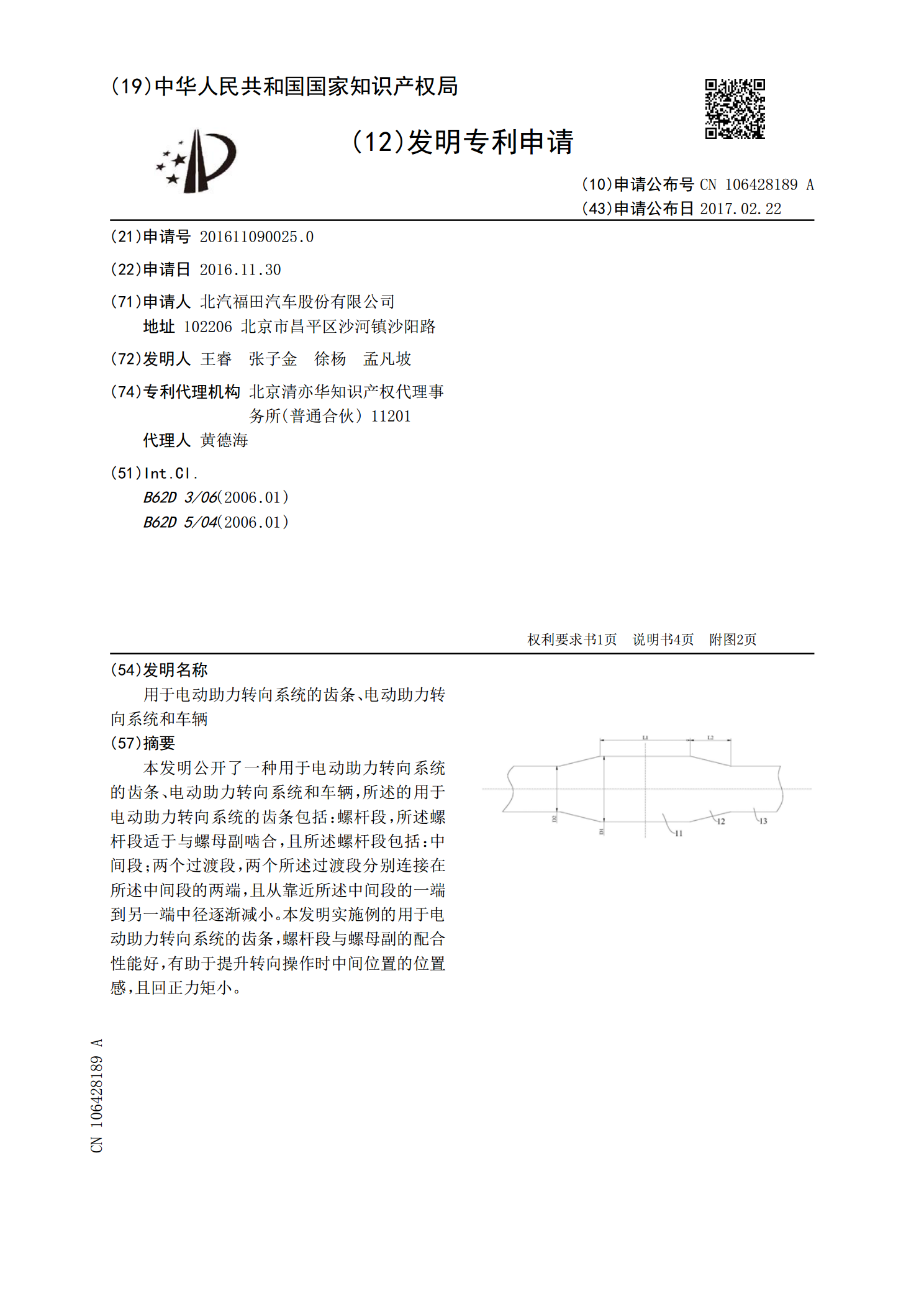
本发明公开了一种用于电动助力转向系统的齿条、电动助力转向系统和车辆,所述的用于电动助力转向系统的齿条包括:螺杆段,所述螺杆段适于与螺母副啮合,且所述螺杆段包括:中间段;两个过渡段,两个所述过渡段分别连接在所述中间段的两端,且从靠近所述中间段的一端到另一端中径逐渐减小。本发明实施例的用于电动助力转向系统的齿条,螺杆段与螺母副的配合性能好,有助于提升转向操作时中间位置的位置感,且回正力矩小。
电动助力转向系统.pdf
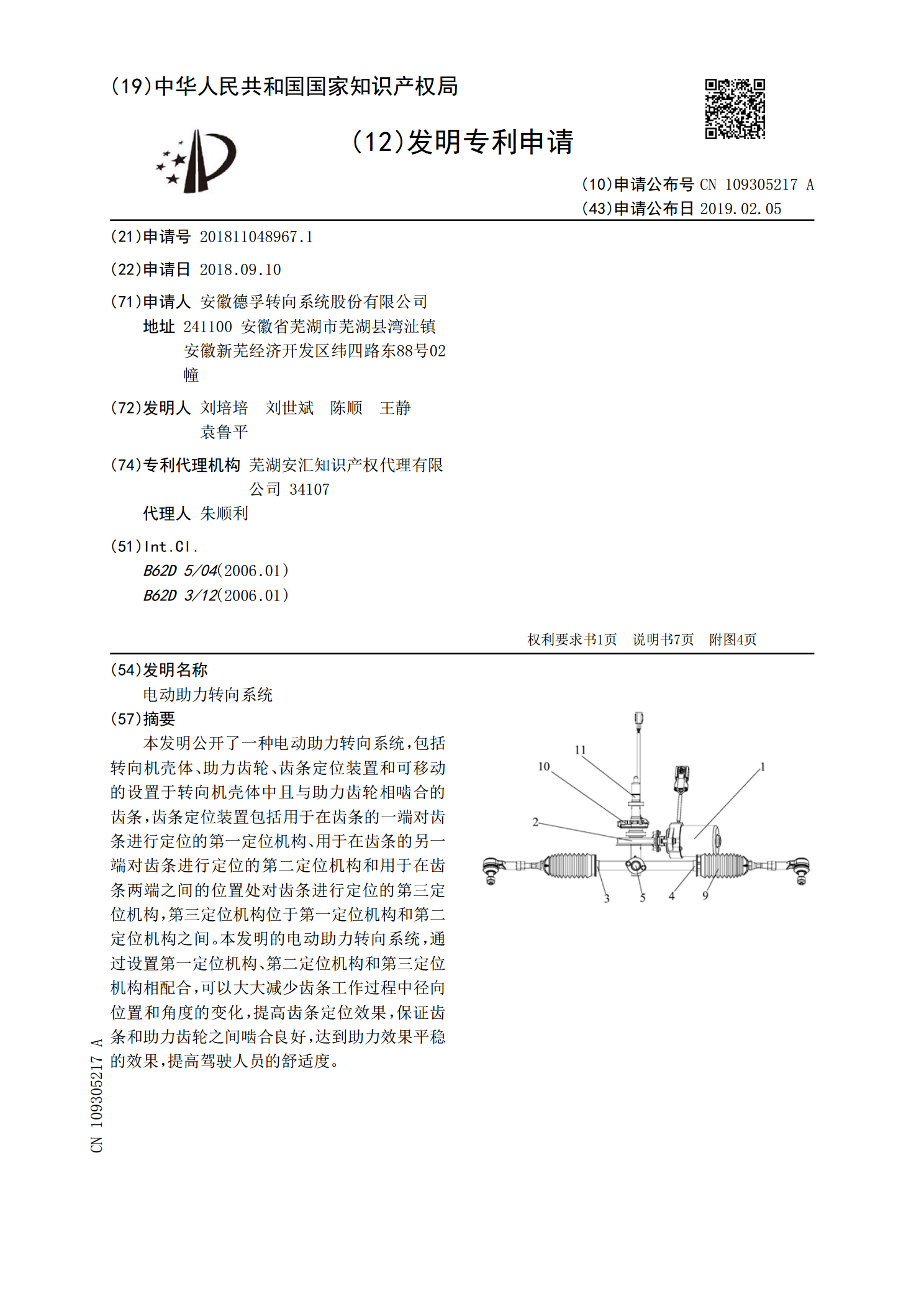
本发明公开了一种电动助力转向系统,包括转向机壳体、助力齿轮、齿条定位装置和可移动的设置于转向机壳体中且与助力齿轮相啮合的齿条,齿条定位装置包括用于在齿条的一端对齿条进行定位的第一定位机构、用于在齿条的另一端对齿条进行定位的第二定位机构和用于在齿条两端之间的位置处对齿条进行定位的第三定位机构,第三定位机构位于第一定位机构和第二定位机构之间。本发明的电动助力转向系统,通过设置第一定位机构、第二定位机构和第三定位机构相配合,可以大大减少齿条工作过程中径向位置和角度的变化,提高齿条定位效果,保证齿条和助力齿轮之间
电动助力转向系统.pdf
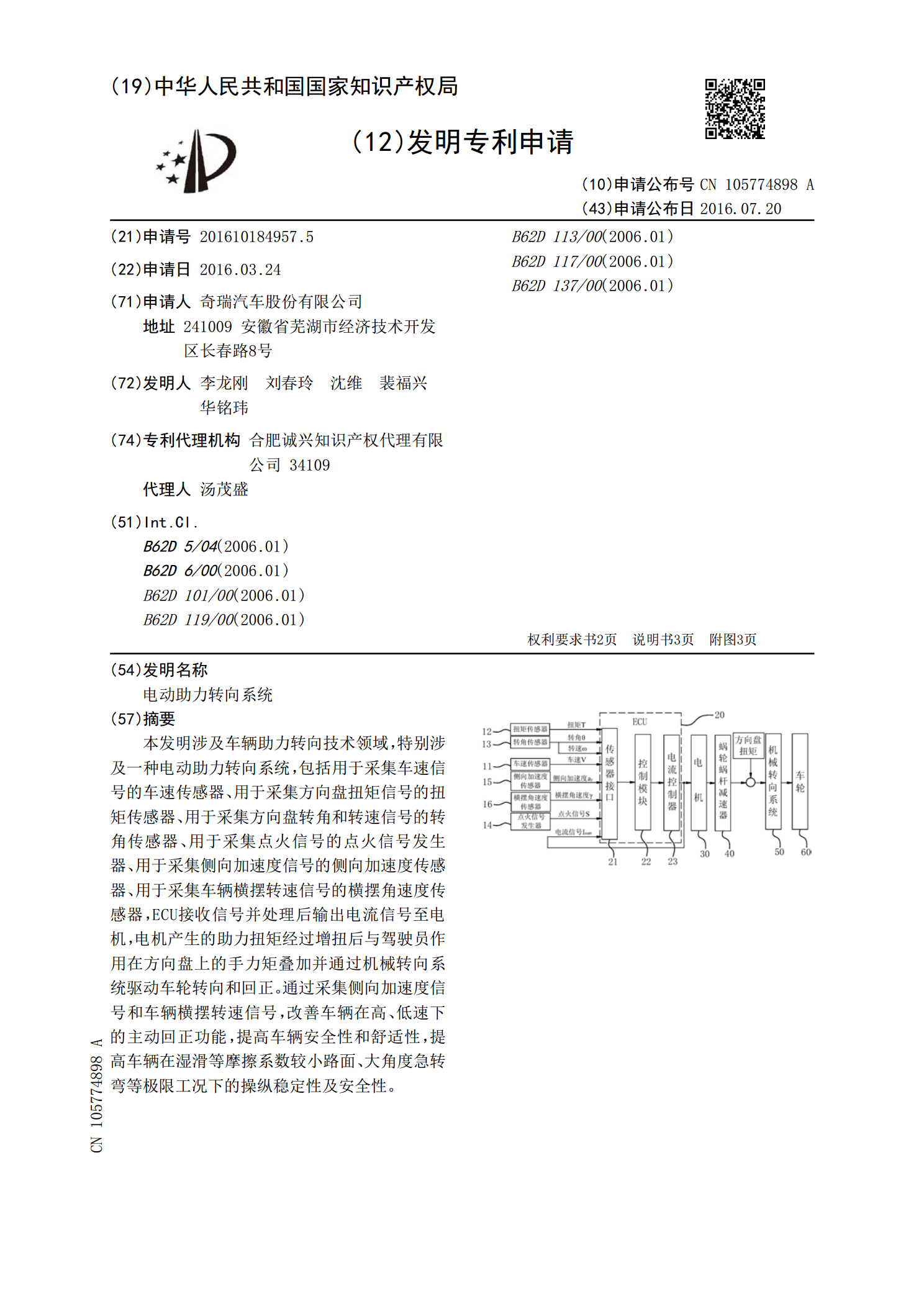
本发明涉及车辆助力转向技术领域,特别涉及一种电动助力转向系统,包括用于采集车速信号的车速传感器、用于采集方向盘扭矩信号的扭矩传感器、用于采集方向盘转角和转速信号的转角传感器、用于采集点火信号的点火信号发生器、用于采集侧向加速度信号的侧向加速度传感器、用于采集车辆横摆转速信号的横摆角速度传感器,ECU接收信号并处理后输出电流信号至电机,电机产生的助力扭矩经过增扭后与驾驶员作用在方向盘上的手力矩叠加并通过机械转向系统驱动车轮转向和回正。通过采集侧向加速度信号和车辆横摆转速信号,改善车辆在高、低速下的主动回正功
电动助力转向系统.pdf
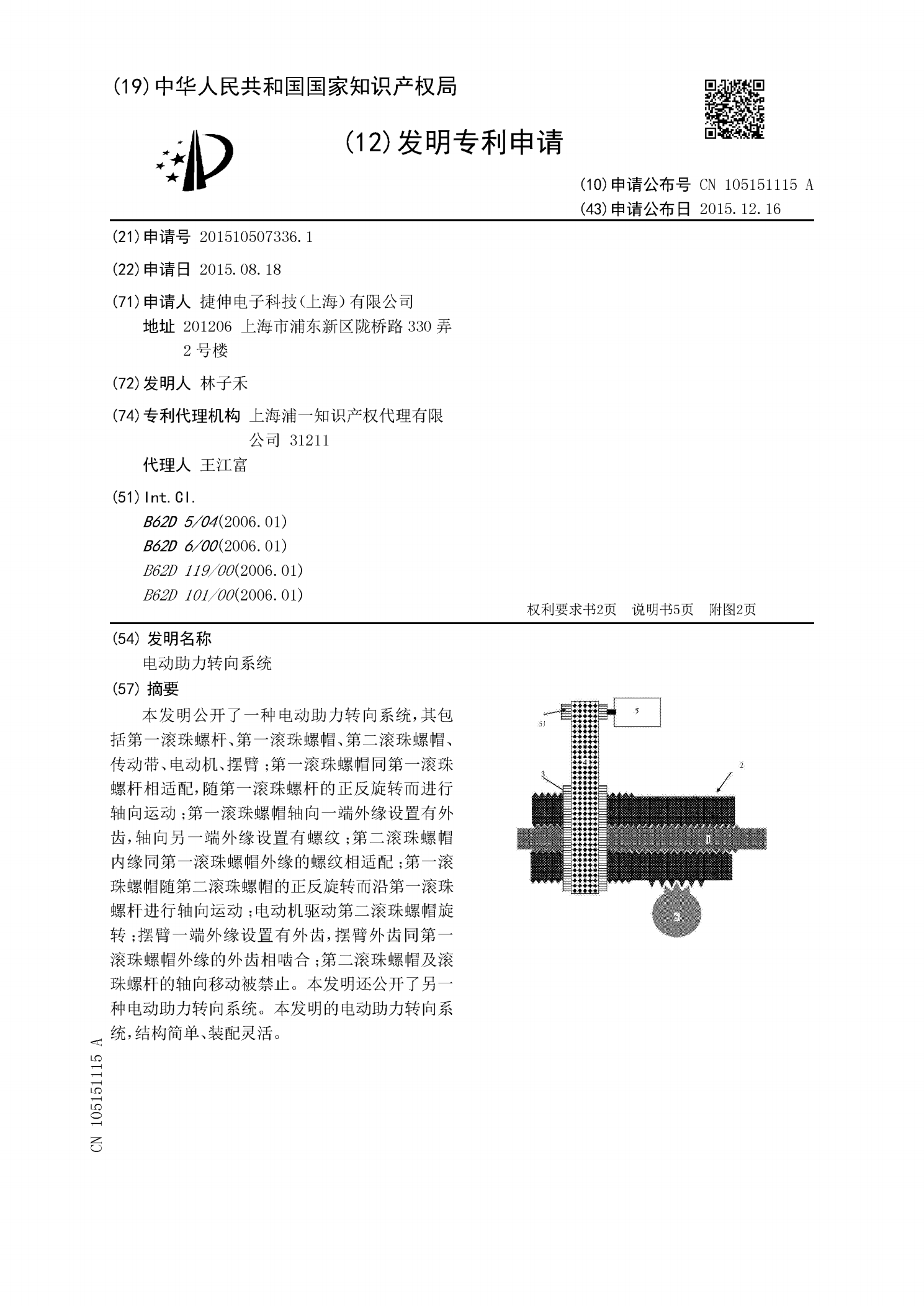
本发明公开了一种电动助力转向系统,其包括第一滚珠螺杆、第一滚珠螺帽、第二滚珠螺帽、传动带、电动机、摆臂;第一滚珠螺帽同第一滚珠螺杆相适配,随第一滚珠螺杆的正反旋转而进行轴向运动;第一滚珠螺帽轴向一端外缘设置有外齿,轴向另一端外缘设置有螺纹;第二滚珠螺帽内缘同第一滚珠螺帽外缘的螺纹相适配;第一滚珠螺帽随第二滚珠螺帽的正反旋转而沿第一滚珠螺杆进行轴向运动;电动机驱动第二滚珠螺帽旋转;摆臂一端外缘设置有外齿,摆臂外齿同第一滚珠螺帽外缘的外齿相啮合;第二滚珠螺帽及滚珠螺杆的轴向移动被禁止。本发明还公开了另一种电动

电动助力转向系统.pdf
本发明涉及一种电动助力转向系统,首先提供了一种新型的双行星轮传动机构,采用两个太阳轮分别连接输入轴与输出轴,第一内齿圈能够受控转动,第二内齿圈固定;然后在上述双行星轮传动机构上设置一个高低速转向辅助机构,该辅助机构根据车速高低,借助离合器对第一行星轮的转动进行限制或解除限制,本发明能够依据驾驶员指令和轿车的行驶工况,自动切换工作状态,使车辆实现低速转向轻便灵活,中高速转向简单稳定的转向特性。并且系统结构简单,操作非常方便。