
制驱动力控制装置.pdf

阳炎****找我

1/10
2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

制驱动力控制装置.pdf
电子控制装置(1)具备:制驱动力控制部,基于车轮速度来控制车辆的制驱动力;以及车轮速度校正部,针对每个车轮来运算用于使检测到的所有的车轮的车轮速度与规定速度一致的车轮速度校正量,并对检测到的车轮的车轮速度利用该车轮的车轮速度校正量进行校正、或者针对每个车轮来运算用于使检测到的所有的车轮的轮径与规定轮径一致的轮径校正量,并对检测到的车轮的车轮速度使用该车轮的轮径校正量进行校正,车轮速度校正部基于根据车身速度推定出的推定车身加减速度与由车身前后加速度传感器检测到的检测车身加减速度之差、或者动力源的输出值,来运
驱动力控制装置.pdf
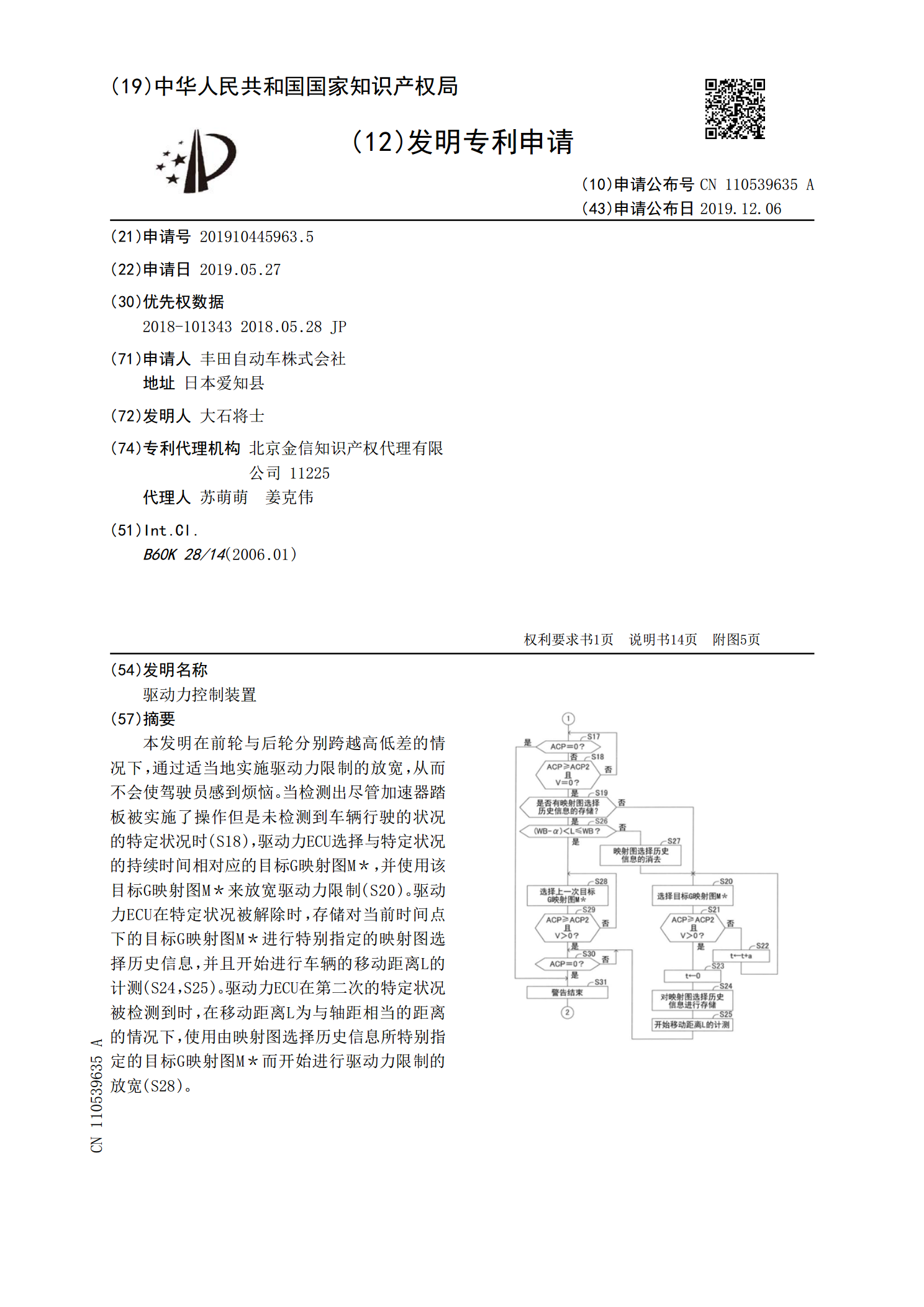
本发明在前轮与后轮分别跨越高低差的情况下,通过适当地实施驱动力限制的放宽,从而不会使驾驶员感到烦恼。当检测出尽管加速器踏板被实施了操作但是未检测到车辆行驶的状况的特定状况时(S18),驱动力ECU选择与特定状况的持续时间相对应的目标G映射图M*,并使用该目标G映射图M*来放宽驱动力限制(S20)。驱动力ECU在特定状况被解除时,存储对当前时间点下的目标G映射图M*进行特别指定的映射图选择历史信息,并且开始进行车辆的移动距离L的计测(S24,S25)。驱动力ECU在第二次的特定状况被检测到时,在移动距离L为
驱动力控制装置.pdf
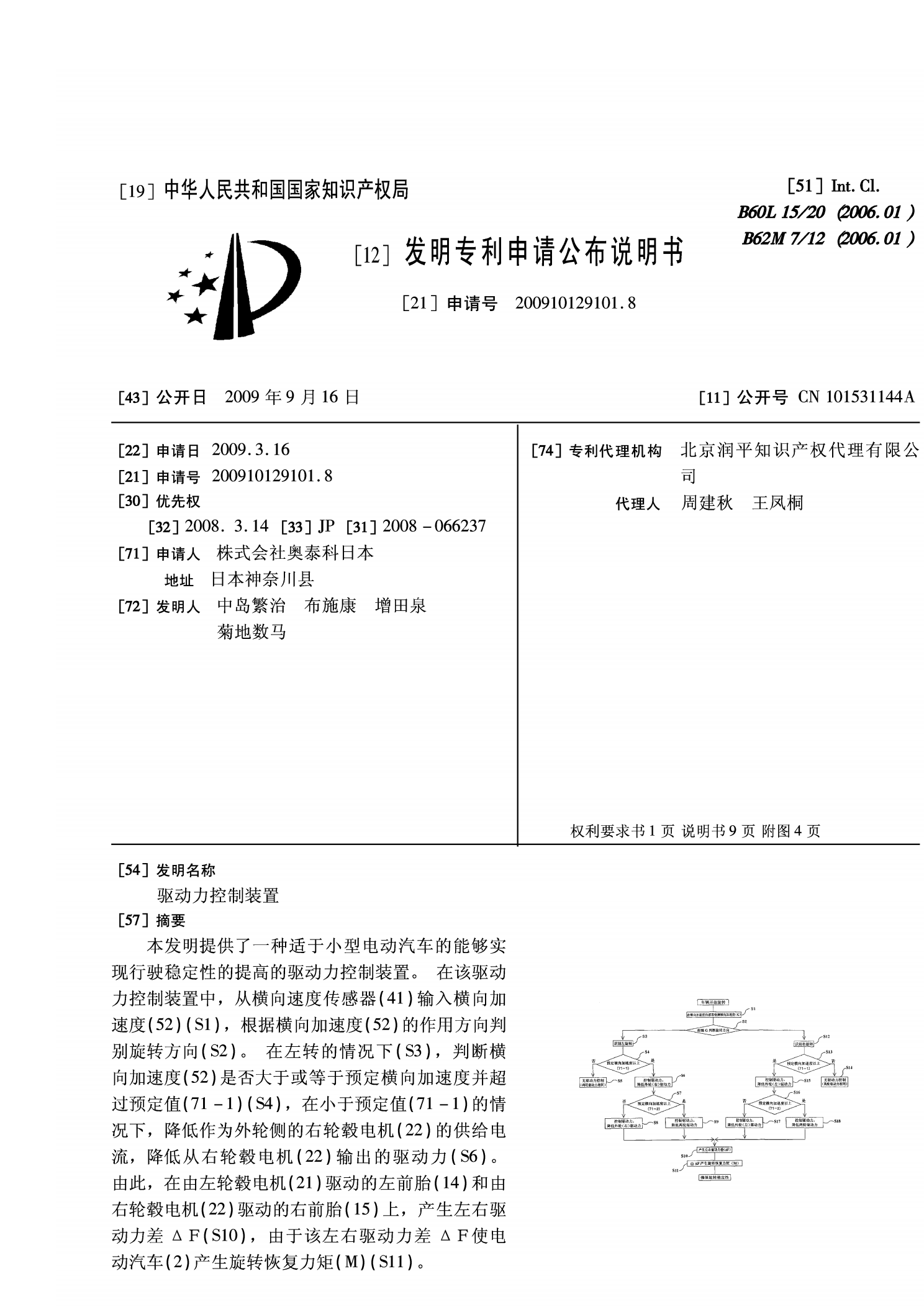
本发明提供了一种适于小型电动汽车的能够实现行驶稳定性的提高的驱动力控制装置。在该驱动力控制装置中,从横向速度传感器(41)输入横向加速度(52)(S1),根据横向加速度(52)的作用方向判别旋转方向(S2)。在左转的情况下(S3),判断横向加速度(52)是否大于或等于预定横向加速度并超过预定值(71-1)(S4),在小于预定值(71-1)的情况下,降低作为外轮侧的右轮毂电机(22)的供给电流,降低从右轮毂电机(22)输出的驱动力(S6)。由此,在由左轮毂电机(21)驱动的左前胎(14)和由右轮

驱动力控制装置.pdf
本发明提供驱动力控制装置,在任意一个马达发生故障的情况下都能够抑制行驶性能、车辆的运行情况的稳定性降低。构成为判断产生了不能从第一马达和第二马达中的任意一个马达输出所希望的转矩的故障这一情况(步骤S2),并在产生了故障的情况下,从第一马达和第二马达中的另一个马达输出转矩(步骤S10至步骤S13),并且控制离合器的传递转矩容量(步骤S7),以使从另一个马达输出的转矩的至少一部分传递到右侧的驱动轮和左侧的驱动轮中的连结了一个马达的第一驱动轮。

驱动力控制装置.pdf
本发明提供一种驱动力控制装置,通过适当地控制分别设置于各个驱动轮的多个马达,能够使行驶时的车辆整体的效率良好。构成为求出驱动装置被要求的总转矩(步骤S4),求出第一马达的输出转矩与第二马达的输出转矩的总计值为总转矩的第一马达的暂定转矩与第二马达的暂定转矩的多个组合,并选择所求出的多个组合中的、电源的输出电力量最少的第一马达的暂定转矩与第二马达的暂定转矩的组合(步骤S5),基于选择出的组合的第一马达的暂定转矩从第一马达输出转矩,并且,基于选择出的组合的第二马达的暂定转矩从第二马达输出转矩(步骤S6)。