
基于视觉检测系统的橱柜调节脚全自动装配控制方法.pdf

鹏飞****可爱


1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于视觉检测系统的橱柜调节脚全自动装配控制方法.pdf
基于视觉检测系统的橱柜调节脚全自动装配控制方法,属于全自动装配领域。现有的塑料橱柜调节脚全自动装配过程中,由于采用人工装配方法,存在装配效率低、装配成品误差率高的问题。一种基于视觉检测系统的橱柜调节脚全自动装配控制方法,选取两组工件图片作为训练样本;对选取的训练样本进行图像缩放和去噪声处理,得到两种原始灰度图像,对灰度图像分别进行二值化处理,提取ROI区域,提取ROI区域的轮廓特征得到轮廓图像,利用轮廓图像的像素值计算得到轮廓Hu矩,将轮廓Hu矩作为样本,生成训练模型;对待检测工件进行拍摄,重复上述过程获

一种橱柜调节脚全自动装配系统中的筒形件提升机.pdf
一种橱柜调节脚全自动装配系统中的筒形件提升机,它涉及种筒形件提升机。本发明目的是为解决当前对物料的整理、运送的设备主要为振动盘,但因筒形件的规格较多,无法用同套振动盘满足所有规格的整理和运送的问题。所述储料箱倾斜设在支撑架上并与支撑架相铰接,第台阶体和第二台阶体通过底部连接板固接,运动座板设置在第二台阶体的内部,固定板处于第台阶体和第二台阶体的间隙内,当运动座板向上运动到最高点时,第二台阶体与出料口所在平面处于同平面上,第台阶体与固定板处于同平面上;当运动座板向下运动到最低点时,第二台阶体与固定板处于同平
橱柜调节脚.pdf
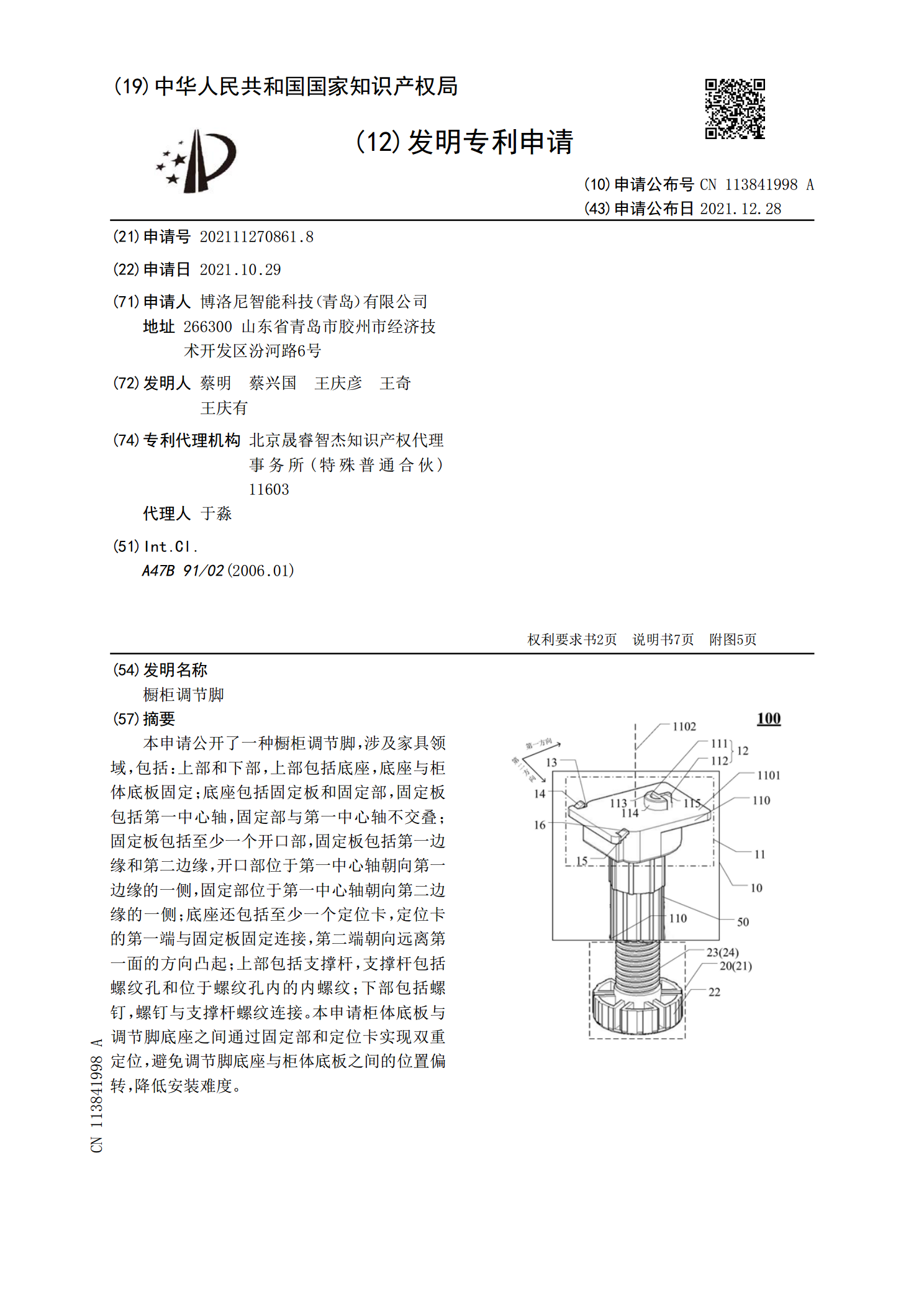
本申请公开了一种橱柜调节脚,涉及家具领域,包括:上部和下部,上部包括底座,底座与柜体底板固定;底座包括固定板和固定部,固定板包括第一中心轴,固定部与第一中心轴不交叠;固定板包括至少一个开口部,固定板包括第一边缘和第二边缘,开口部位于第一中心轴朝向第一边缘的一侧,固定部位于第一中心轴朝向第二边缘的一侧;底座还包括至少一个定位卡,定位卡的第一端与固定板固定连接,第二端朝向远离第一面的方向凸起;上部包括支撑杆,支撑杆包括螺纹孔和位于螺纹孔内的内螺纹;下部包括螺钉,螺钉与支撑杆螺纹连接。本申请柜体底板与调节脚底座

基于视觉检测的光强调节方法、装置、系统及处理设备.pdf
本申请的实施例提供了一种基于视觉检测的光强调节方法、装置、系统及处理设备,涉及计算机视觉领域。通过获取图像采集装置发送的初始采集图像以及参照图像;分别对初始采集图像以及参照图像的图像质量进行评价,得到第一图像评分值以及第二图像评分值;根据第一图像评分值、第二图像评分值以及初始采集图像,对初始采集图像进行循环比对处理,确定目标图像以及目标电流值。能够对采集的初始采集图像的图像质量,自适应地对光源的光强进行调节,提高了视觉测量系统的可重复性和实时性,提高了采集的工件图像的质量以及效率。

一种基于视觉的全自动港口吊装车系统及控制方法.pdf
本发明公开了一种基于视觉的全自动港口吊装车系统及控制方法,包括吊装车和行道,所述吊装车包括控制器、底部的轮子和位于底部的识别器,所述识别器采集口向下设置,所述行道包括两条白线和设置在白线边上的二维码,所述识别器采集白线和二维码的信息并传输给控制器,所述控制器依据识别器采集的信息控制吊装车的运动轨迹和启停,所述吊装车上部设有平台,平台的下表面设有采集装货区域图像的摄像头。采用本发明的技术方案,可以实现全自动码头货车的行驶吊货装货操作,节约了人力物力,并且精度高,操作及时准确。