
一种助力外骨骼装置.pdf

宏硕****mo

1/9

2/9
3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种助力外骨骼装置.pdf
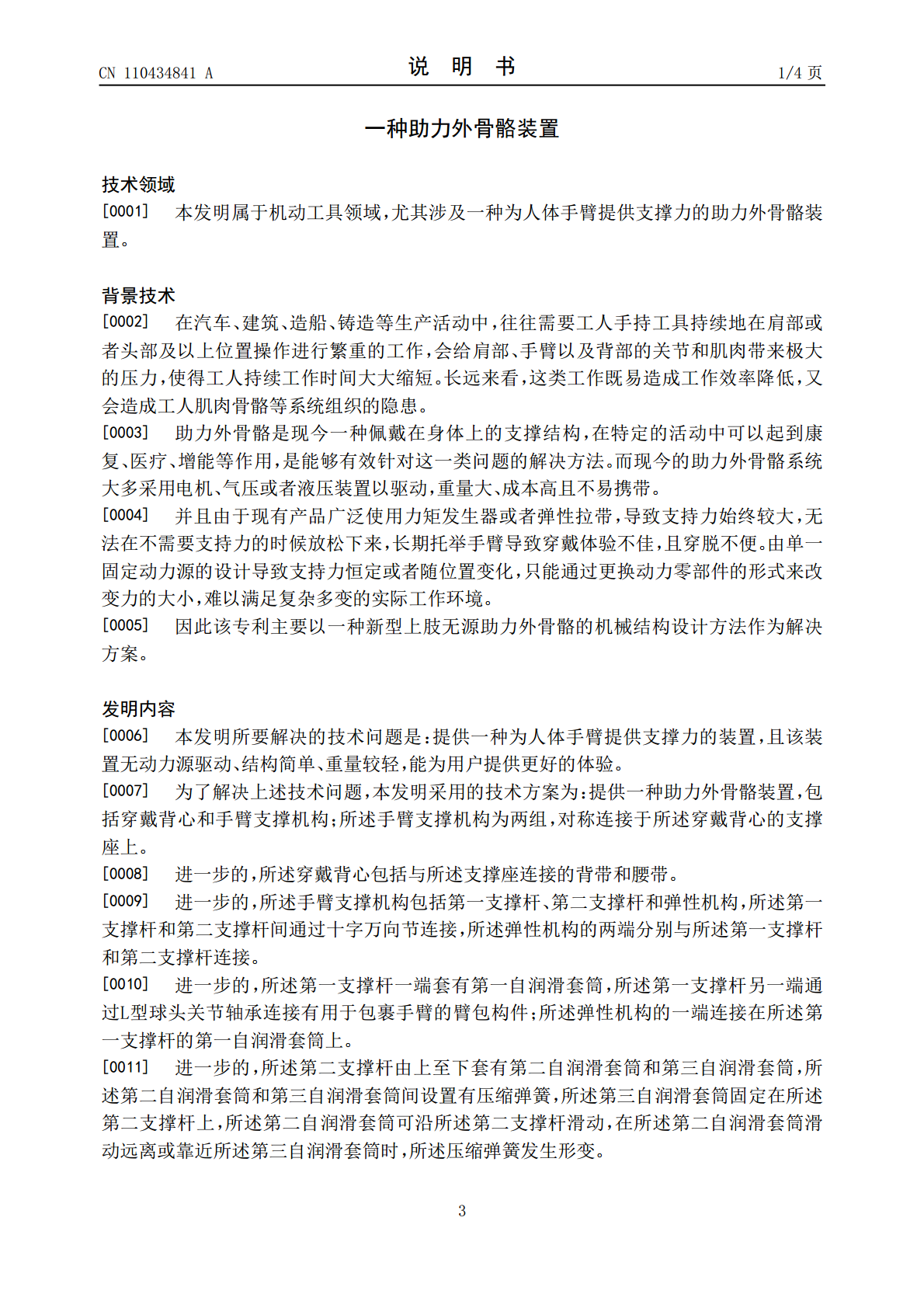
本发明提供了一种助力外骨骼装置,包括穿戴背心和手臂支撑机构;所述手臂支撑机构为两组,对称固定于所述穿戴背心的支撑座上;所述手臂支撑机构包括第一支撑杆、第二支撑杆、弹性机构等组件,由于弹性机构在工作中不便于更换,因此我们采用改变弹性机构上支点到手臂支撑构件的十字万向节的距离的方式实现支持力的自适应,即可以在相同位置提供不同大小的力;本发明的有益效果在于:不需要外接动力源,装置结构简单,便于携带,工作时能够提供稳定的支撑力;通过无极调节改变助力大小,无需额外换接零件。
一种腰部外骨骼助力装置.pdf
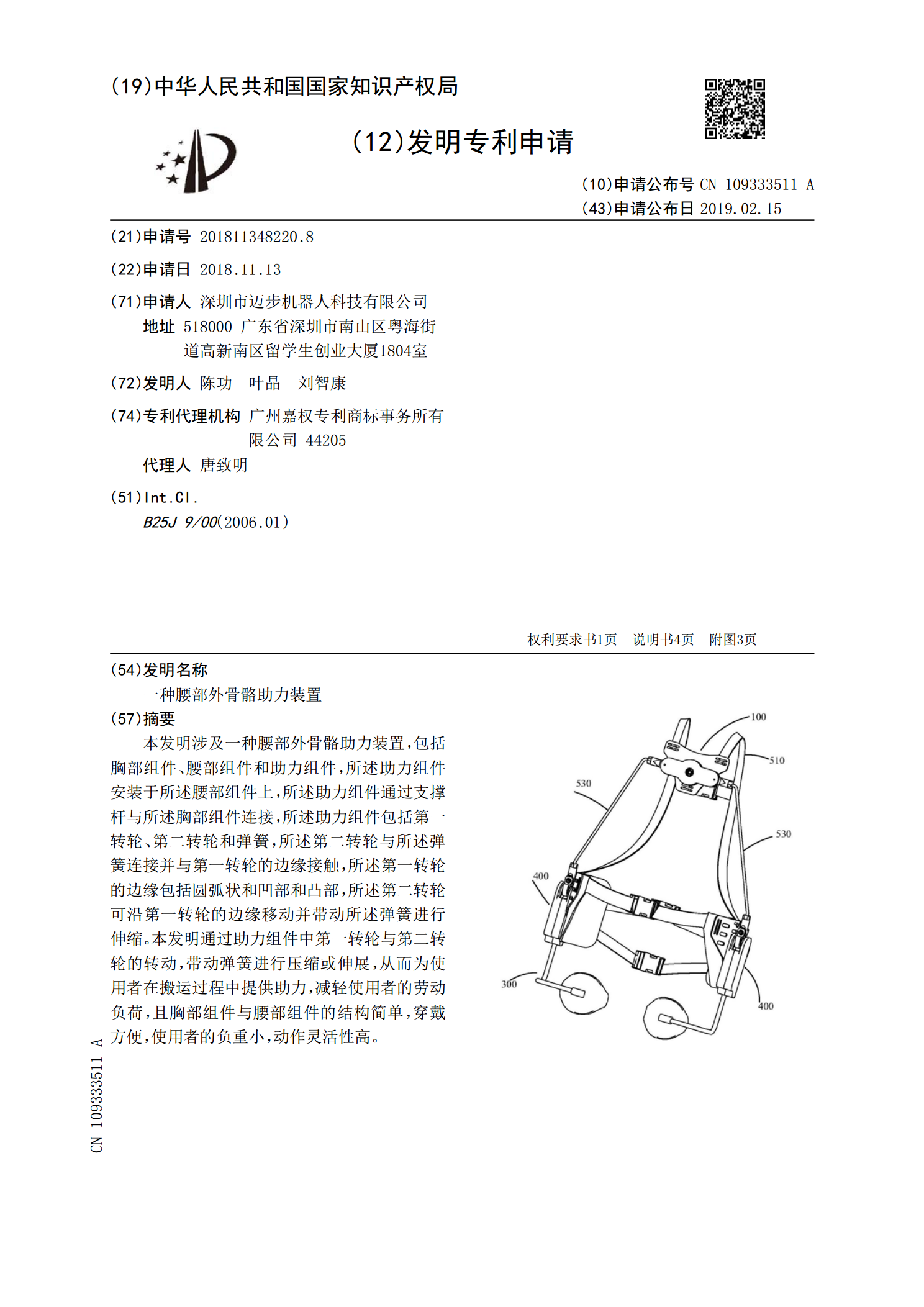
本发明涉及一种腰部外骨骼助力装置,包括胸部组件、腰部组件和助力组件,所述助力组件安装于所述腰部组件上,所述助力组件通过支撑杆与所述胸部组件连接,所述助力组件包括第一转轮、第二转轮和弹簧,所述第二转轮与所述弹簧连接并与第一转轮的边缘接触,所述第一转轮的边缘包括圆弧状和凹部和凸部,所述第二转轮可沿第一转轮的边缘移动并带动所述弹簧进行伸缩。本发明通过助力组件中第一转轮与第二转轮的转动,带动弹簧进行压缩或伸展,从而为使用者在搬运过程中提供助力,减轻使用者的劳动负荷,且胸部组件与腰部组件的结构简单,穿戴方便,使用者
一种背部仿生外骨骼助力装置.pdf
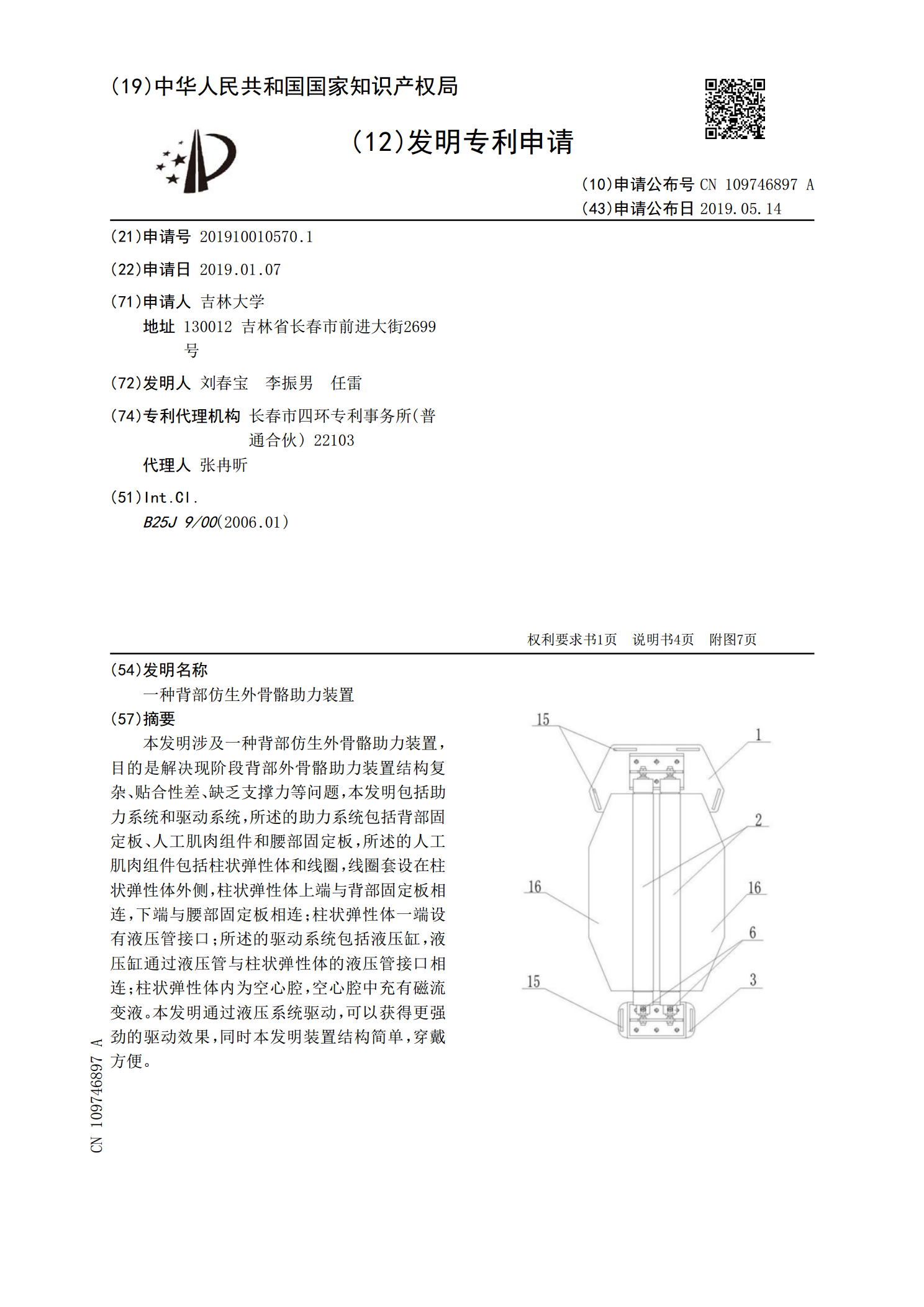
本发明涉及一种背部仿生外骨骼助力装置,目的是解决现阶段背部外骨骼助力装置结构复杂、贴合性差、缺乏支撑力等问题,本发明包括助力系统和驱动系统,所述的助力系统包括背部固定板、人工肌肉组件和腰部固定板,所述的人工肌肉组件包括柱状弹性体和线圈,线圈套设在柱状弹性体外侧,柱状弹性体上端与背部固定板相连,下端与腰部固定板相连;柱状弹性体一端设有液压管接口;所述的驱动系统包括液压缸,液压缸通过液压管与柱状弹性体的液压管接口相连;柱状弹性体内为空心腔,空心腔中充有磁流变液。本发明通过液压系统驱动,可以获得更强劲的驱动效果
一种穿戴式外骨骼助力装置.pdf
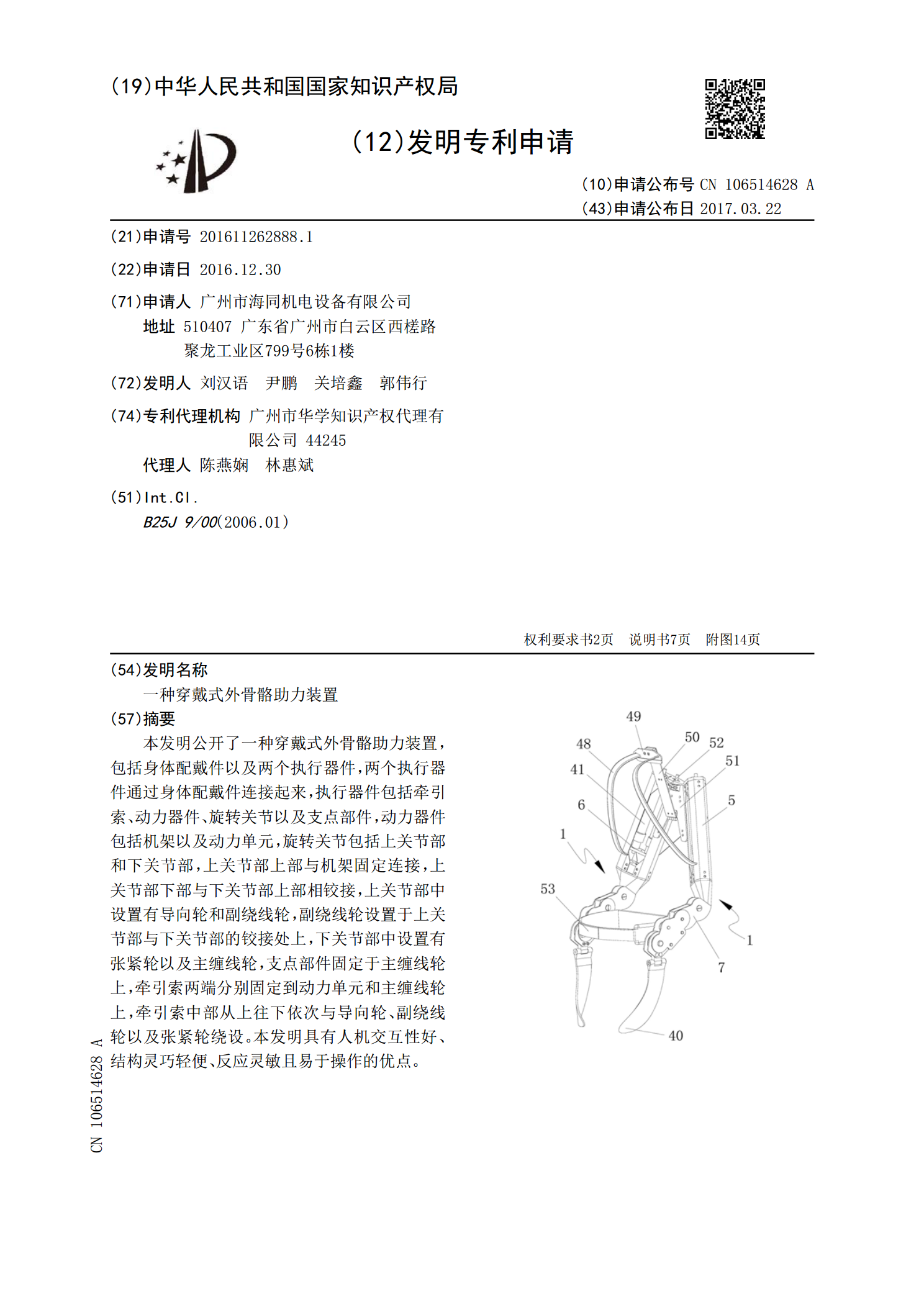
本发明公开了一种穿戴式外骨骼助力装置,包括身体配戴件以及两个执行器件,两个执行器件通过身体配戴件连接起来,执行器件包括牵引索、动力器件、旋转关节以及支点部件,动力器件包括机架以及动力单元,旋转关节包括上关节部和下关节部,上关节部上部与机架固定连接,上关节部下部与下关节部上部相铰接,上关节部中设置有导向轮和副绕线轮,副绕线轮设置于上关节部与下关节部的铰接处上,下关节部中设置有张紧轮以及主缠线轮,支点部件固定于主缠线轮上,牵引索两端分别固定到动力单元和主缠线轮上,牵引索中部从上往下依次与导向轮、副绕线轮以及张

外骨骼助力康复装置.pdf
本发明公开一种外骨骼助力康复装置的驱动结构的设计,包含:直流电机,一对锥齿轮,直齿轮,内齿条,传动轴,固定板。所述的一对锥齿轮用于改变动力传输的方向;所述的直齿轮和一个锥齿轮组成同轴传动装置;所述的直齿轮和内齿条相互啮合;所述的内齿条的一端和外侧关节下端零件相固定;与现有技术相比,本发明电机采用竖直放置,减小了以往对电机体积的要求;另外本发明机械结构简单,控制精度高,传动力矩大,安全性高。