
一种高可靠双冗余电动舵机控制装置.pdf

Ro****44


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高可靠双冗余电动舵机控制装置.pdf
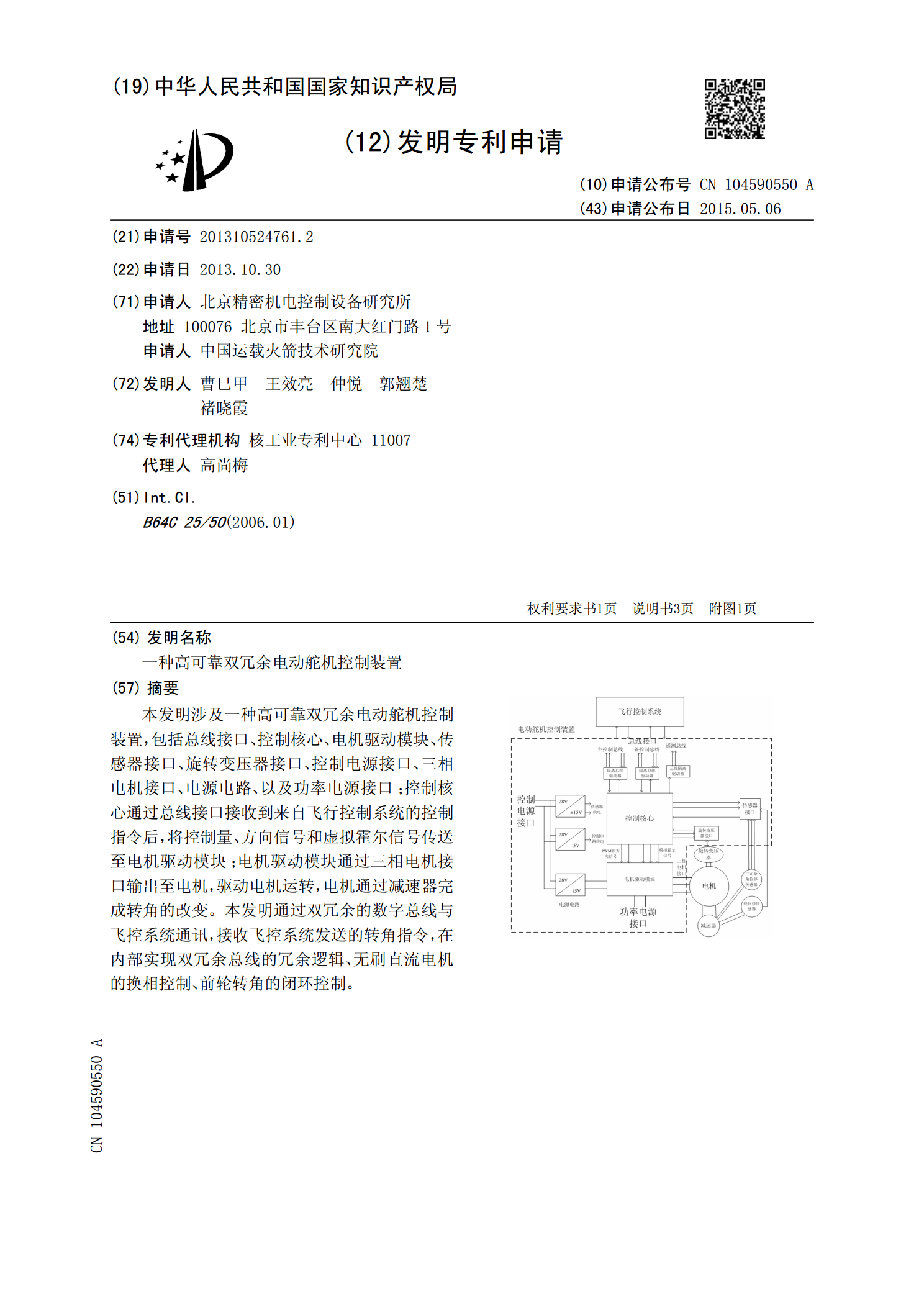
本发明涉及一种高可靠双冗余电动舵机控制装置,包括总线接口、控制核心、电机驱动模块、传感器接口、旋转变压器接口、控制电源接口、三相电机接口、电源电路、以及功率电源接口;控制核心通过总线接口接收到来自飞行控制系统的控制指令后,将控制量、方向信号和虚拟霍尔信号传送至电机驱动模块;电机驱动模块通过三相电机接口输出至电机,驱动电机运转,电机通过减速器完成转角的改变。本发明通过双冗余的数字总线与飞控系统通讯,接收飞控系统发送的转角指令,在内部实现双冗余总线的冗余逻辑、无刷直流电机的换相控制、前轮转角的闭环控制。

一种双冗余电动舵机控制系统及方法.pdf
本发明一种双冗余电动舵机控制系统,包括用于分别对控制舵机的差动周转轮系减速机进行动力输入的第一、二电机,用于采集舵机运动状态的第一位置传感器和第二位置传感器;用于分别接受第一、二位置传感器信号的第一、二数字控制单元;第一、二电机上分别设置第一、二制动器,第一、二制动器分别与第一、二数字控制单元的输出端连接;第一、二数字控制单元分别通过第一、二逆变器向第一、二电机发送控制信号;第一、二逆变器上分别设置第一、二桥路电流传感器,用于向第一、二数字控制单元传输桥路电流采样信号;第一、二数字控制单元分别通过引出CA

双冗余电动转向装置.pdf
本发明公开了一种双冗余电动转向装置,其包括方向盘、转向输入轴、管柱式电动转向机构、齿条式电动转向机构和齿条;所述方向盘与转向输入轴连接;所述转向输入轴下端设置有齿轮,所述齿轮与齿条啮合;所述管柱式电动转向机构用于对所述转向输入轴施加力矩;所述齿条式电动转向结构用于驱动所述齿条直线运动。本发明的双冗余的新型电动转向装置,提高了可靠性和安全性,实现了系统双冗余控制的高效配合,使得电动转向系统在故障时仍有冗余主动转向的能力;在电源故障等极端条件下,装置还具有机械转向机构,驾驶员可接管对汽车转向的控制,得到更好的
一种电动舵机驱动装置.pdf
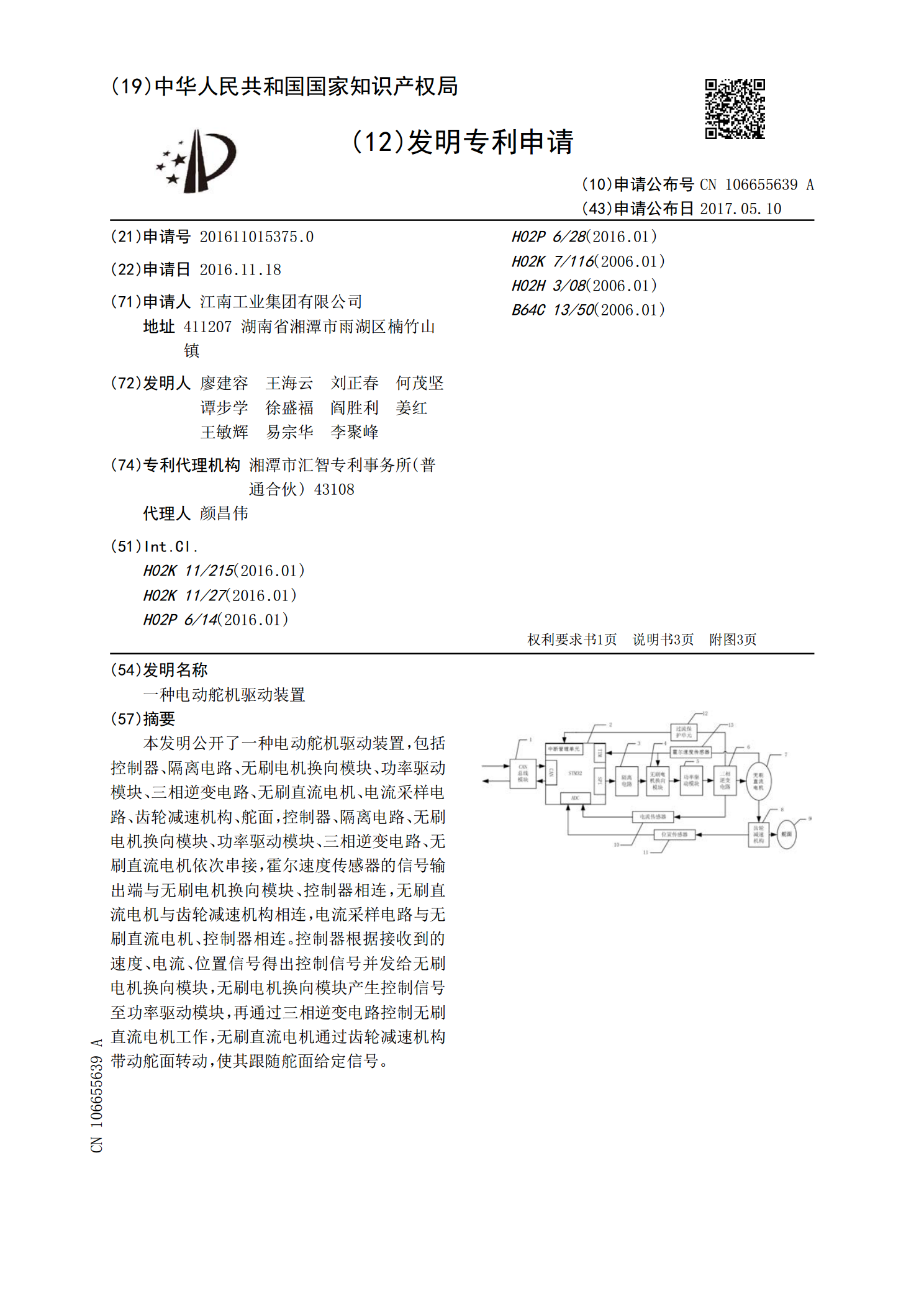
本发明公开了一种电动舵机驱动装置,包括控制器、隔离电路、无刷电机换向模块、功率驱动模块、三相逆变电路、无刷直流电机、电流采样电路、齿轮减速机构、舵面,控制器、隔离电路、无刷电机换向模块、功率驱动模块、三相逆变电路、无刷直流电机依次串接,霍尔速度传感器的信号输出端与无刷电机换向模块、控制器相连,无刷直流电机与齿轮减速机构相连,电流采样电路与无刷直流电机、控制器相连。控制器根据接收到的速度、电流、位置信号得出控制信号并发给无刷电机换向模块,无刷电机换向模块产生控制信号至功率驱动模块,再通过三相逆变电路控制无刷

一种数字电动舵机控制装置和控制方法.pdf
本发明提供了一种数字电动舵机控制装置和控制方法,信号调理电路将舵面偏角给定信号进行电压变换、滤波、限幅处理后经AD转换送入控制器DSP,DSP输出数字控制信号,经数字隔离后送给驱动电路转换成功率控制信号,通过控制主功率电路从而控制无刷直流电动机工作,无刷直流电机通过传动齿轮组带动舵面偏转以跟随舵面偏角给定信号;无刷直流电机的母线电流经电流传感器采样反馈至DSP,与传动齿轮组相连的角度传感器实时反馈舵面当前偏角,传给DSP。本发明有效的加快了无刷直流电动舵机的频响,提高了系统的抗干扰性。