
栏板自动焊接装置.pdf

努力****绮亦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

栏板自动焊接装置.pdf
栏板自动焊接装置,其特征在于:包括压轮、轮座、顶紧装置和位移传感器,轮座上安装压轮,顶紧装置包括油缸或者汽缸,轮座底部与顶紧装置连接,位移传感器连接油缸或者汽缸的活塞杆或者轮座。本发明中,油缸或者汽缸对压轮的力始终保持一致,从而使压轮与环件之间的压力基本没有变化,避免因压轮压力过大影响环件质量的问题;压轮的位移量通过编码器准确的测量得出,有效提高测量精度和减少误差。
焊接螺母自动焊接装置.pdf
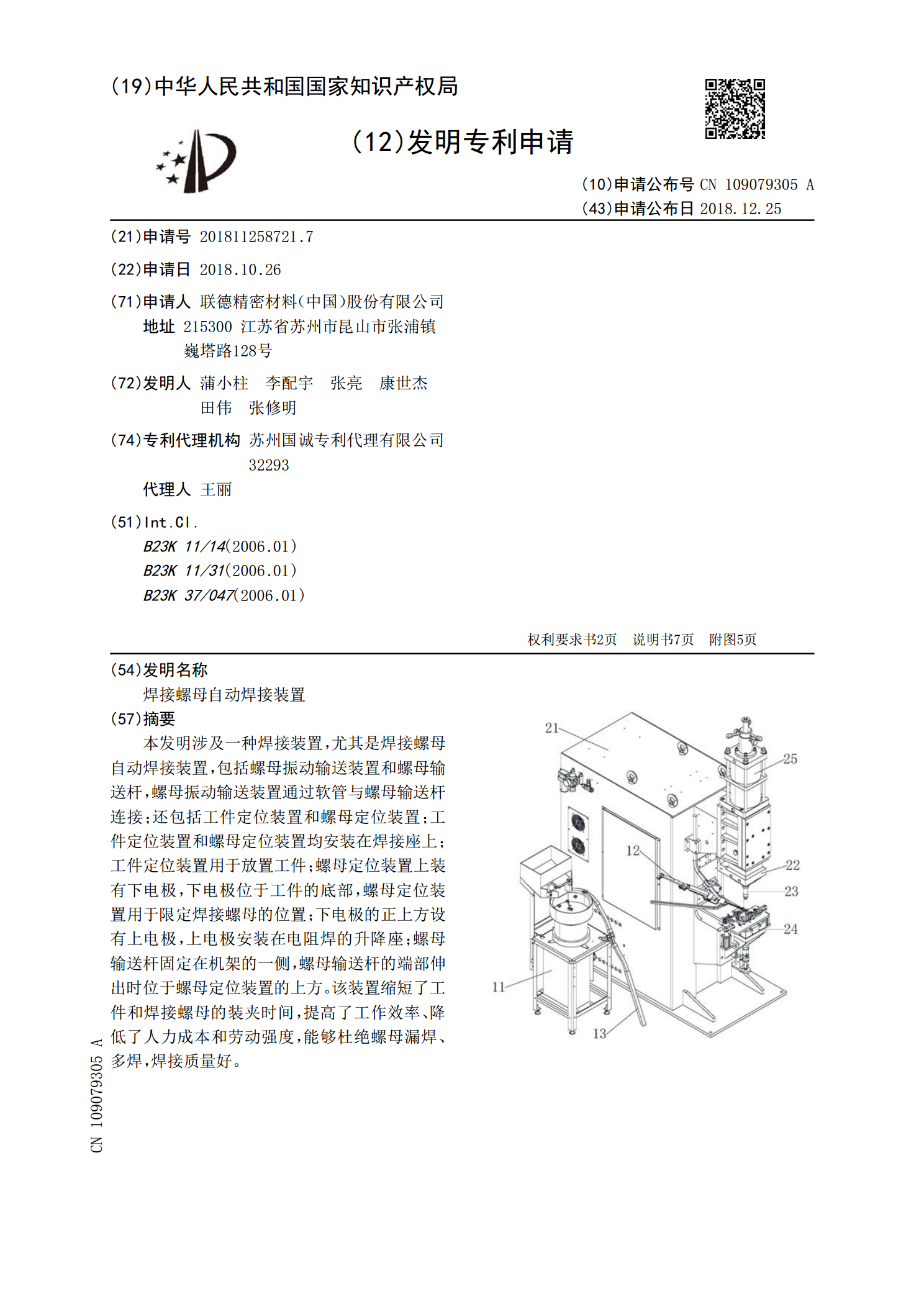
本发明涉及一种焊接装置,尤其是焊接螺母自动焊接装置,包括螺母振动输送装置和螺母输送杆,螺母振动输送装置通过软管与螺母输送杆连接;还包括工件定位装置和螺母定位装置;工件定位装置和螺母定位装置均安装在焊接座上;工件定位装置用于放置工件;螺母定位装置上装有下电极,下电极位于工件的底部,螺母定位装置用于限定焊接螺母的位置;下电极的正上方设有上电极,上电极安装在电阻焊的升降座;螺母输送杆固定在机架的一侧,螺母输送杆的端部伸出时位于螺母定位装置的上方。该装置缩短了工件和焊接螺母的装夹时间,提高了工作效率、降低了人力成

自动焊接装置.pdf
本发明涉及一种自动焊接设备,更具体地说,本发明涉及一种用于船舶制造的自动焊接设备。针对现有技术中结构复杂、操作不便的缺陷,提供一种结构简单、操作方便的自动焊接装置。本发明包括支架和固定焊枪的夹持架,支架具有工作面,工作面上设有呈三角形布置的主动轮、支撑轮和托轮,主动轮与动力装置相联接。采用本发明的技术方案使得自动焊接装置结构简单,制造方便,提高了产品质量,延长了使用年限,减少作业人员劳动强度,提高作业效率,降低作业成本。?

底盘自动焊接装置.pdf
本发明公开了一种底盘自动焊接装置,包括承载台、支撑架、焊枪及相对设置于承载台上的两个变位机。两个变位机之间形成用于固定待焊接底盘的夹持部。因此,在对底盘焊接之前可先将底盘固定于两个变位机之间。进一步的,支撑架通过立柱转动及安装杆滑动带动焊枪在底盘的范围内移动,从而实现焊接。而当需要切换底盘的位置时,启动变位机以带动夹持部上的待焊接底盘旋转即可。由于上述底盘自动焊接装置在焊接过程中可对底盘进行自动旋转,无需人工操作。因此,焊接效率得到有效地提升。
焊接自动加压装置.pdf
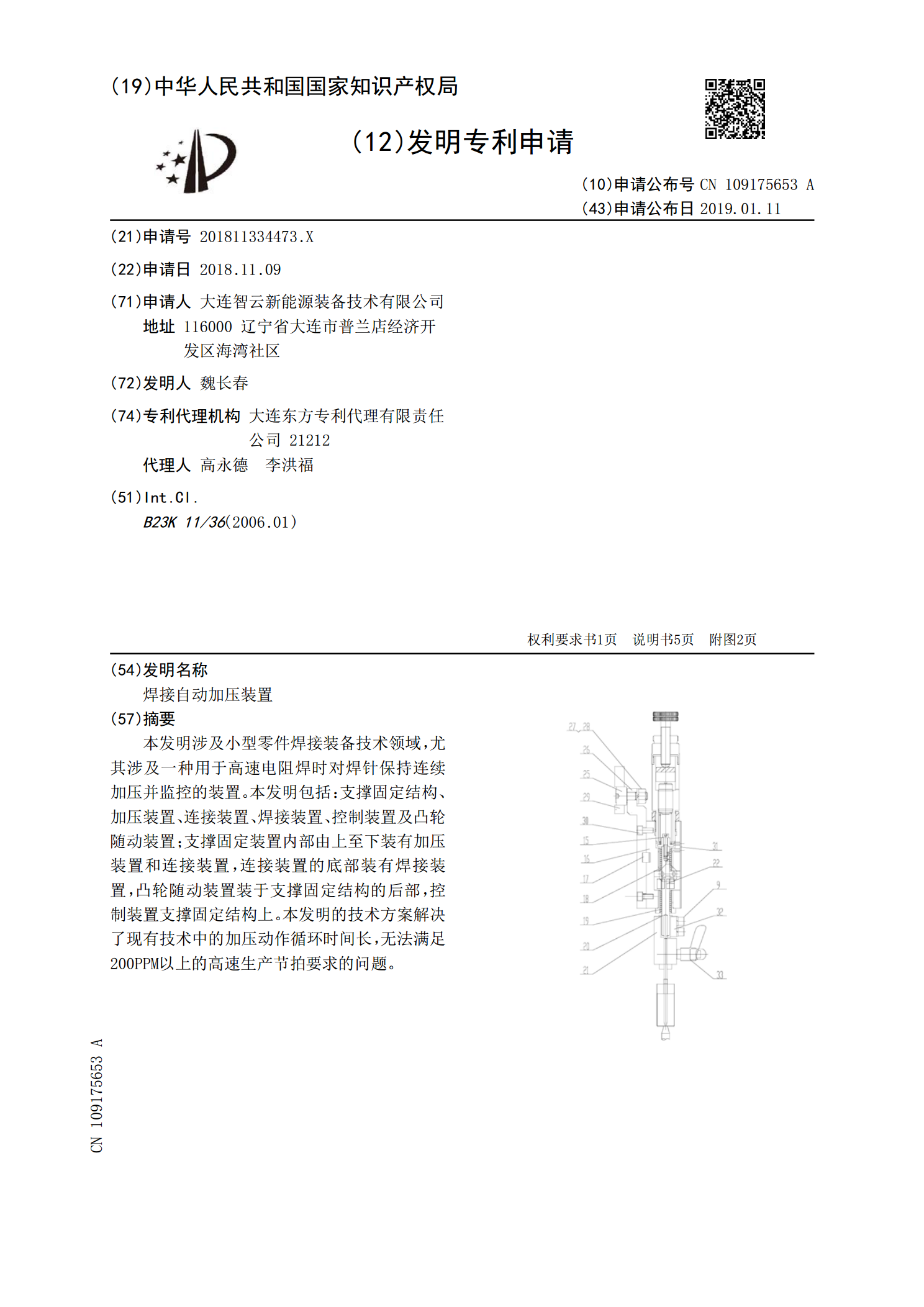
本发明涉及小型零件焊接装备技术领域,尤其涉及一种用于高速电阻焊时对焊针保持连续加压并监控的装置。本发明包括:支撑固定结构、加压装置、连接装置、焊接装置、控制装置及凸轮随动装置;支撑固定装置内部由上至下装有加压装置和连接装置,连接装置的底部装有焊接装置,凸轮随动装置装于支撑固定结构的后部,控制装置支撑固定结构上。本发明的技术方案解决了现有技术中的加压动作循环时间长,无法满足200PPM以上的高速生产节拍要求的问题。