
基于虚拟时差的运动阵列空间无源定位算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于虚拟时差的运动阵列空间无源定位算法.docx
基于虚拟时差的运动阵列空间无源定位算法基于虚拟时差的运动阵列空间无源定位算法摘要:无源定位技术在许多领域中具有广泛的应用,尤其是在无线传感器网络、无线通信和室内定位等领域。虚拟时差是一种近年来被广泛研究的技术,其利用无源传感器节点的相对运动,通过测量到达时间差来实现定位。本文提出了一种基于虚拟时差的运动阵列空间无源定位算法,详细介绍了算法原理、实现步骤和实验结果。实验结果表明,该算法在定位精度、鲁棒性和实时性方面都有较好的表现。关键词:无源定位、虚拟时差、运动阵列、定位精度、鲁棒性1.引言无源定位是一种无

基于时差的多辐射源数据关联与无源定位算法.docx
基于时差的多辐射源数据关联与无源定位算法基于时差的多辐射源数据关联与无源定位算法摘要:无源定位是一种在没有辅助信号的情况下,通过对接收到的信号进行分析和处理,估计目标位置的技术。本文提出了一种基于时差的多辐射源数据关联与无源定位算法。该算法通过对接收到的不同辐射源信号之间的时差进行关联,实现对目标位置的定位。在仿真实验中,该算法表现出较高的定位准确性和鲁棒性。关键词:无源定位、辐射源、时差、数据关联、定位算法1.引言无源定位在许多应用领域中具有重要的意义,如雷达定位、无线传感器网络中的定位等。传统的无源定

多站无源时差频差定位算法研究.docx
多站无源时差频差定位算法研究多站无源时差频差定位算法研究摘要:无线定位技术在室内和室外定位中起着重要的作用。无源定位系统,由于其低功耗、低成本和易于部署,越来越受到关注。无源时差频差定位算法是一种基于接收节点之间的时差和频差测量来实现定位的方法。本文对无源时差频差定位算法进行了研究,并分析了其优缺点。1.引言随着无线通信技术的发展,无线定位技术在许多领域得到了广泛应用,如室内导航、安防和智能农业等。传统的无线定位系统一般需要在目标对象上部署主动式标签或传感器,因此需要较高的能源消耗和复杂的安装。而无源定位

基于闭式泰勒算法的无人机组无源时差定位方法.pdf
本发明公开一种基于闭式泰勒算法的无人机组无源时差定位方法,其实现步骤为:1.计算待测目标到主观测站与各个副观测站的距离差;2.用闭式泰勒公式求解待测目标的位置;3.在不同位置计算多组待测目标初始值;4.从获取的多组目标初始值中选取使得目标代价函数最小值的初始值数据作为待测目标解;5.当测量误差较大时用误差估计函数修正定位结果。本发明通过将待测目标到主观测站的距离看成已知数,可以比TSWLS算法少一个观测站。本发明通过用误差估计函数来修正误差,可以进行定位结果纠正。
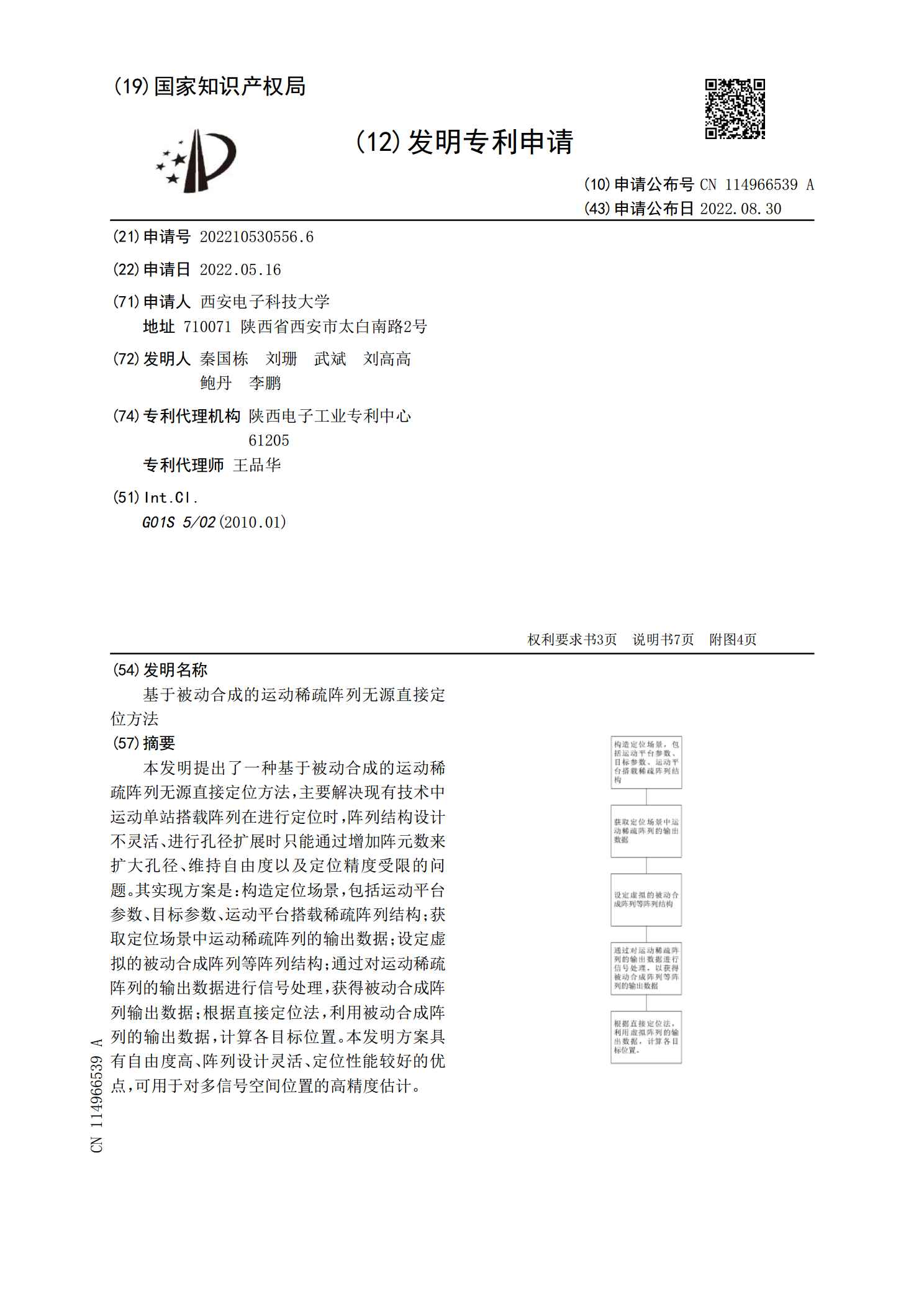
基于被动合成的运动稀疏阵列无源直接定位方法.pdf
本发明提出了一种基于被动合成的运动稀疏阵列无源直接定位方法,主要解决现有技术中运动单站搭载阵列在进行定位时,阵列结构设计不灵活、进行孔径扩展时只能通过增加阵元数来扩大孔径、维持自由度以及定位精度受限的问题。其实现方案是:构造定位场景,包括运动平台参数、目标参数、运动平台搭载稀疏阵列结构;获取定位场景中运动稀疏阵列的输出数据;设定虚拟的被动合成阵列等阵列结构;通过对运动稀疏阵列的输出数据进行信号处理,获得被动合成阵列输出数据;根据直接定位法,利用被动合成阵列的输出数据,计算各目标位置。本发明方案具有自由度高