
基于被动合成的运动稀疏阵列无源直接定位方法.pdf

新月****姐a

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于被动合成的运动稀疏阵列无源直接定位方法.pdf
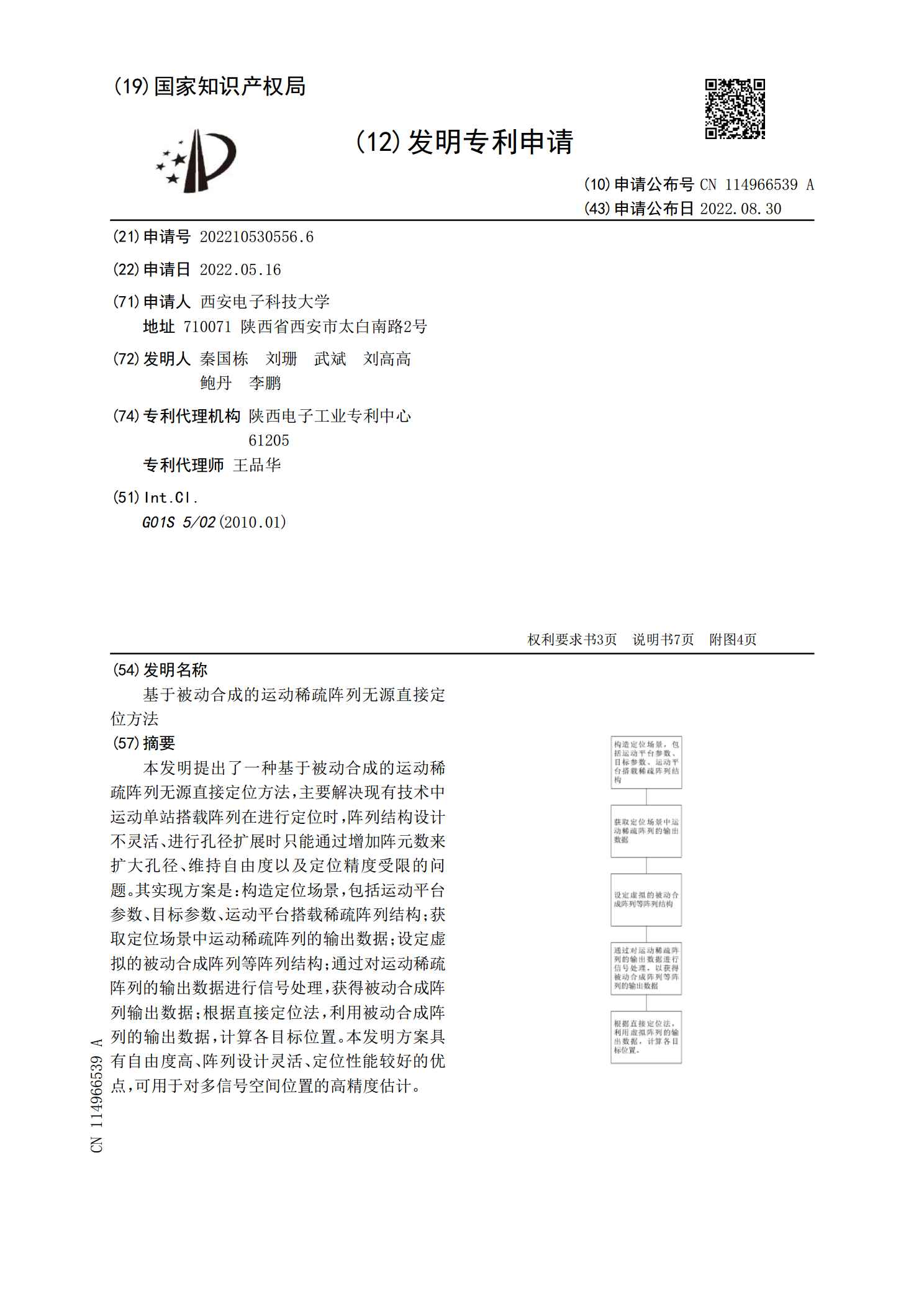
本发明提出了一种基于被动合成的运动稀疏阵列无源直接定位方法,主要解决现有技术中运动单站搭载阵列在进行定位时,阵列结构设计不灵活、进行孔径扩展时只能通过增加阵元数来扩大孔径、维持自由度以及定位精度受限的问题。其实现方案是:构造定位场景,包括运动平台参数、目标参数、运动平台搭载稀疏阵列结构;获取定位场景中运动稀疏阵列的输出数据;设定虚拟的被动合成阵列等阵列结构;通过对运动稀疏阵列的输出数据进行信号处理,获得被动合成阵列输出数据;根据直接定位法,利用被动合成阵列的输出数据,计算各目标位置。本发明方案具有自由度高

基于相干阵列探测器运动目标激光合成孔径稀疏成像方法.pdf
本公开提供一种基于相干阵列探测器运动目标激光合成孔径稀疏成像方法,包括:采用窄带激光发射信号对待探测目标进行照射,待探测目标存在转动和平动;通过激光本振相干阵列探测器采集待探测目标的多帧激光复图像;在待探测目标运动参数估计的基础上,在数字域对所述多帧激光复图像进行傅里叶反变换,得到多帧空间采样信号,并对所述多帧空间采样信号进行相位补偿和运动补偿;计算空间采样中心,并对所述多帧空间采样信号进行拼接,形成大范围空间稀疏采样信号;通过加长观测时间,降低所述大范围空间稀疏采样信号的稀疏率,并通过压缩感知处理,实现
一种基于复用稀疏阵列的微波主被动探测系统及方法.pdf
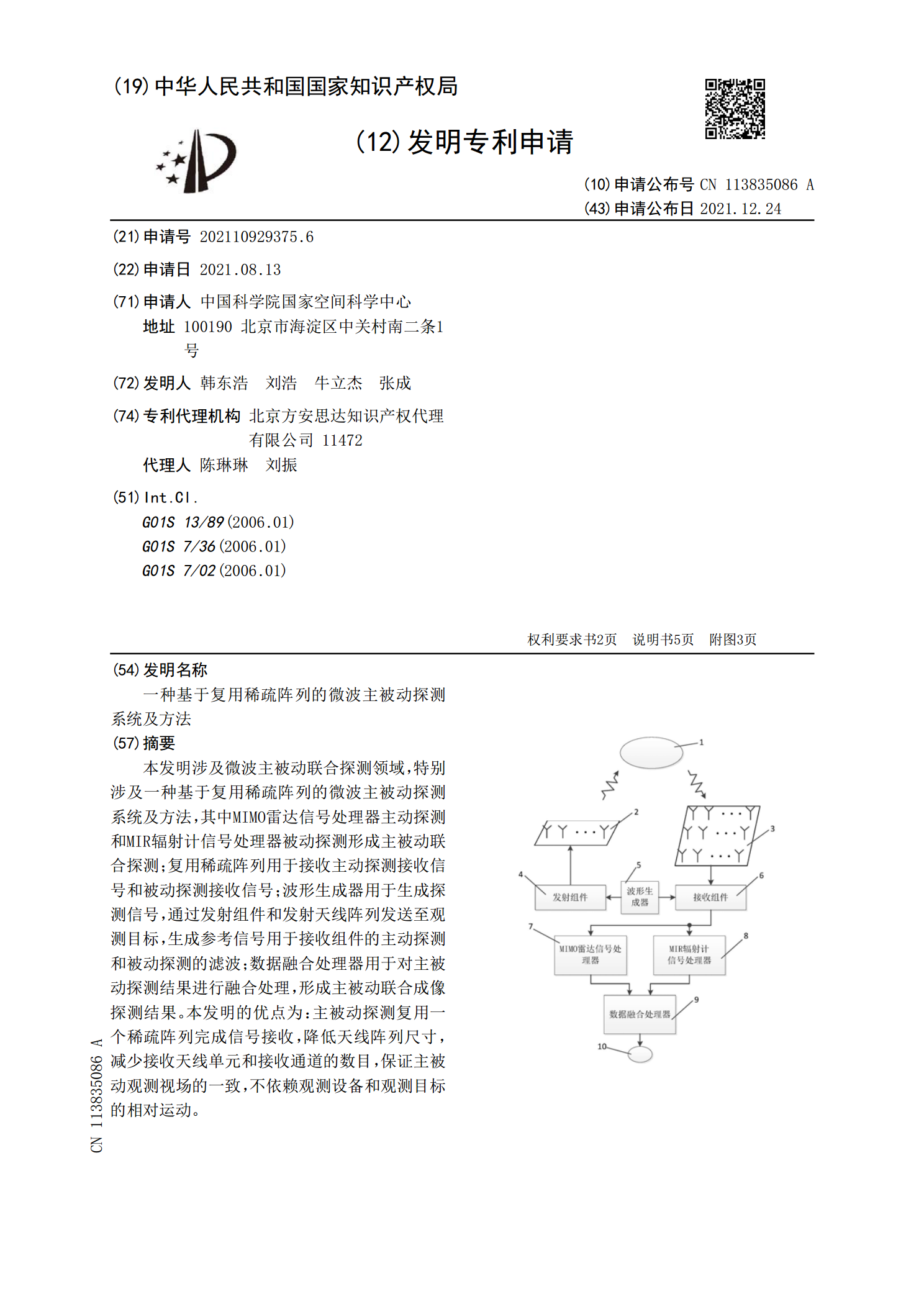
本发明涉及微波主被动联合探测领域,特别涉及一种基于复用稀疏阵列的微波主被动探测系统及方法,其中MIMO雷达信号处理器主动探测和MIR辐射计信号处理器被动探测形成主被动联合探测;复用稀疏阵列用于接收主动探测接收信号和被动探测接收信号;波形生成器用于生成探测信号,通过发射组件和发射天线阵列发送至观测目标,生成参考信号用于接收组件的主动探测和被动探测的滤波;数据融合处理器用于对主被动探测结果进行融合处理,形成主被动联合成像探测结果。本发明的优点为:主被动探测复用一个稀疏阵列完成信号接收,降低天线阵列尺寸,减少接

基于稀疏分解理论的三维被动定位研究.doc
基于稀疏分解理论的三维被动定位研究声源定位是水声信号处理领域经久不衰的研究热点之一,对于我国在海洋战略和国防建设方面的影响不言而喻。相比于主动定位,被动定位探测距离更远且隐蔽性更高,从而在水声对抗时既能增加安全性又能料敌先机、先敌制胜,因此对声源被动定位展开相关工作有着不容小觑的现实意义。鉴于此,本文将基于稀疏分解理论对声源的三维被动定位进行研究,谋求实现对感兴趣声源的三个空间维度位置参数(方位、距离和深度)的高分辨估计。根据目标声源在空域中分布的稀疏性特征,可以借助稀疏分解理论将声源的定位问题转化成一个

基于阵列信号合成和稀疏信号描述的测向算法研究的开题报告.docx
基于阵列信号合成和稀疏信号描述的测向算法研究的开题报告(1)选题背景与意义现代通信系统、雷达系统、声呐系统、无线电定位系统等需要进行无线信号测向或目标探测。其中测向问题是其中的一个重要问题,解决测向问题可以帮助我们确定目标的位置和方向。传统的测向技术主要是依靠物理测量手段,如方向找峰、相位比较等。但这些传统方法存在着可操作性不够强、精度不高、耗时耗力等诸多缺点。为了解决传统测向方法的不足,目前越来越多的研究者开始研究基于阵列信号合成和稀疏信号描述的测向算法。相对于传统方法,基于阵列信号合成和稀疏信号描述的