
基于GNSS和地面基站的组合式导航精确测速定位方法及系统.pdf

a是****澜吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于GNSS和地面基站的组合式导航精确测速定位方法及系统.pdf
本发明公开了基于GNSS和地面基站的组合式导航精确测速定位方法及系统,步骤100、获取车辆进入盲区前的初始位置,步骤200、获得车辆坐标和航向角,在车辆驶入GNSS盲区后的第一个采样时刻,利用多重权值地图匹配算法计算得到车辆在盲区中的坐标和航向角,步骤300、获得当前车辆的速度和横摆角速度,步骤400、根据获得的车辆参数判断车辆是否在GNSS盲区中,步骤500、获取下一时刻车辆位置坐标以及航向角,本发明改进了现有的GNSS点方位角匹配算法,使用前后定位点连线与路段夹角、定位点与路段投影距离和航向角与路段夹
一种GNSS/SINS组合导航精确测速定位方法及系统.pdf
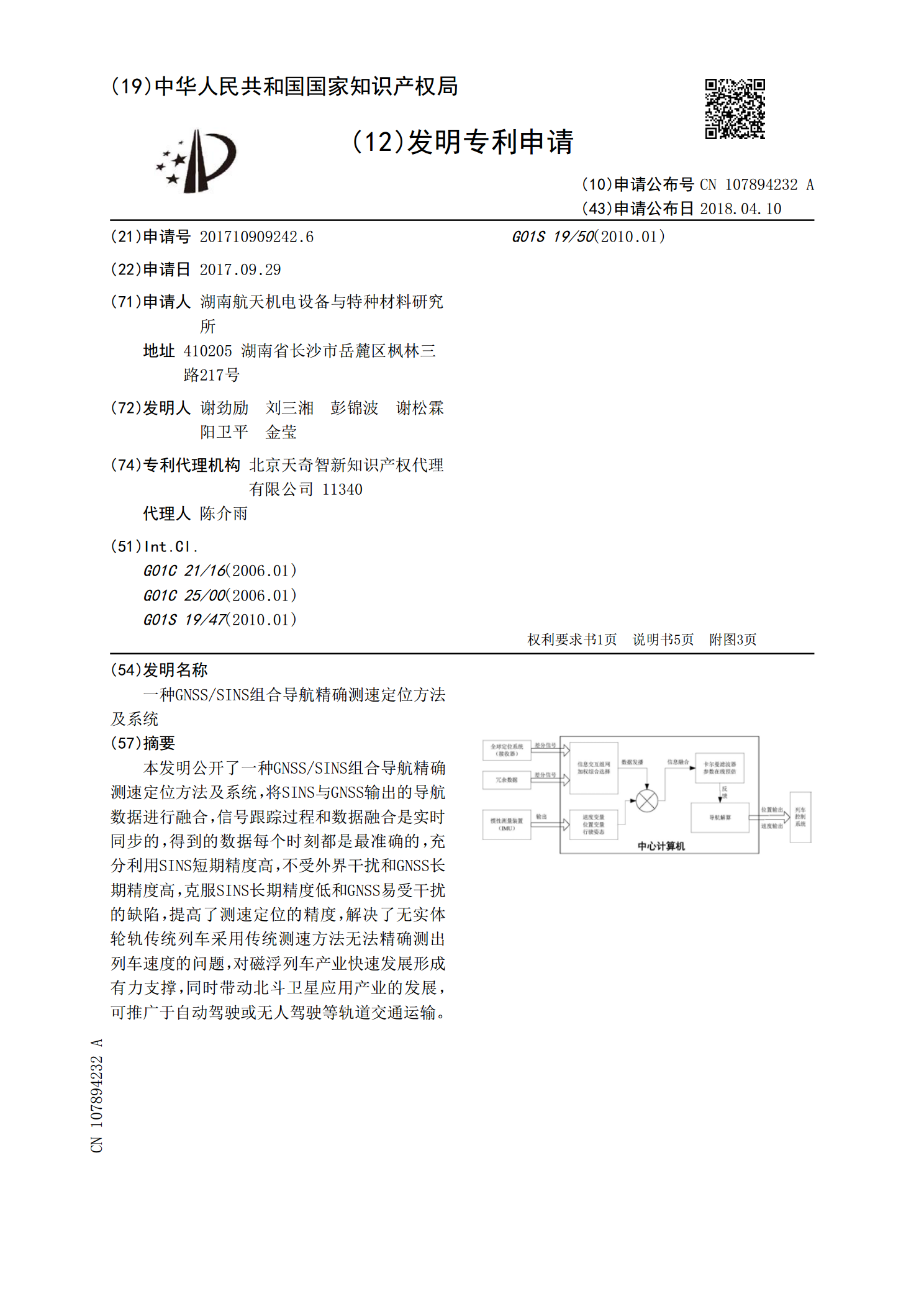
本发明公开了一种GNSS/SINS组合导航精确测速定位方法及系统,将SINS与GNSS输出的导航数据进行融合,信号跟踪过程和数据融合是实时同步的,得到的数据每个时刻都是最准确的,充分利用SINS短期精度高,不受外界干扰和GNSS长期精度高,克服SINS长期精度低和GNSS易受干扰的缺陷,提高了测速定位的精度,解决了无实体轮轨传统列车采用传统测速方法无法精确测出列车速度的问题,对磁浮列车产业快速发展形成有力支撑,同时带动北斗卫星应用产业的发展,可推广于自动驾驶或无人驾驶等轨道交通运输。

减小GNSS导航定位误差的卫星方法──GNSS导航定位误差之六.pptx
,目录PartOnePartTwo轨道参数优化卫星轨道控制轨道调整策略轨道优化算法PartThree信号发射功率增强信号接收灵敏度提升信号处理算法优化信号抗干扰技术PartFour频率规划与分配频率复用技术频率分集技术频率自适应调整PartFive导航算法优化数据融合技术多频段导航技术实时动态差分技术PartSix抗干扰信号处理算法优化抗干扰接收机设计抗干扰天线技术抗干扰频谱管理策略THANKS

基于语义VISLAM和GNSS定位的穿戴式盲人辅助导航装置与方法.pdf
本发明提供一种基于语义SLAM的多传感器融合穿戴式盲人智能辅助导航装置,考虑单一传感器的优点并针对其局限性,提出融合多传感器的SLAM方法,通过融合多传感器的数据,保证了室内外定位的准确性。并且结合语义SLAM可以帮助盲人感知周边环境,并将信息反馈给盲人。留有丰富的视觉信息可供持续开发。本发明中,针对现有视觉SLAM针对在纹理较少的环境中无法进行特征点匹配,从而无法得到三维点在相机坐标系下的深度,我们采用视觉+惯性SLAM算法,可以大大提高算法的稳定性和结果的精确性,使用SLAM方法进行室内定位。

基于挖掘机GNSS精确定位的开采姿态监测系统.docx
基于挖掘机GNSS精确定位的开采姿态监测系统基于挖掘机GNSS精确定位的开采姿态监测系统摘要:随着挖掘机在开采工程中的广泛应用,挖掘机的安全性和效率成为了重要的课题。本文提出了一种基于挖掘机GNSS精确定位的开采姿态监测系统,该系统通过利用全球导航卫星系统(GNSS)实现挖掘机的精确定位,进而利用惯性测量单元(IMU)监测挖掘机的开采姿态,以提高挖掘机的安全性和效率。实验结果表明,该系统能够实现实时监测挖掘机的开采姿态信息,并在姿态异常时进行报警,具有较高的精确性和可靠性。关键词:挖掘机;GNSS;精确定