
基于卷积神经网络(CNN)的无人车避障方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于卷积神经网络(CNN)的无人车避障方法.docx
基于卷积神经网络(CNN)的无人车避障方法基于卷积神经网络(CNN)的无人车避障方法摘要:随着智能交通技术的不断发展,无人车逐渐成为实现自动驾驶的重要技术手段之一。在无人车的自动驾驶过程中,避障是一项重要的任务,它能够确保无人车在复杂环境下安全行驶。本论文将提出一种基于卷积神经网络(CNN)的无人车避障方法,通过对传感器数据进行处理和分析,利用卷积神经网络模型实现对障碍物进行识别和判断,并根据识别结果进行避障决策,从而为无人车提供准确、实时的避障指导。关键词:无人车、避障、卷积神经网络、传感器数据、识别、
无人车路径跟踪及避障方法.pdf
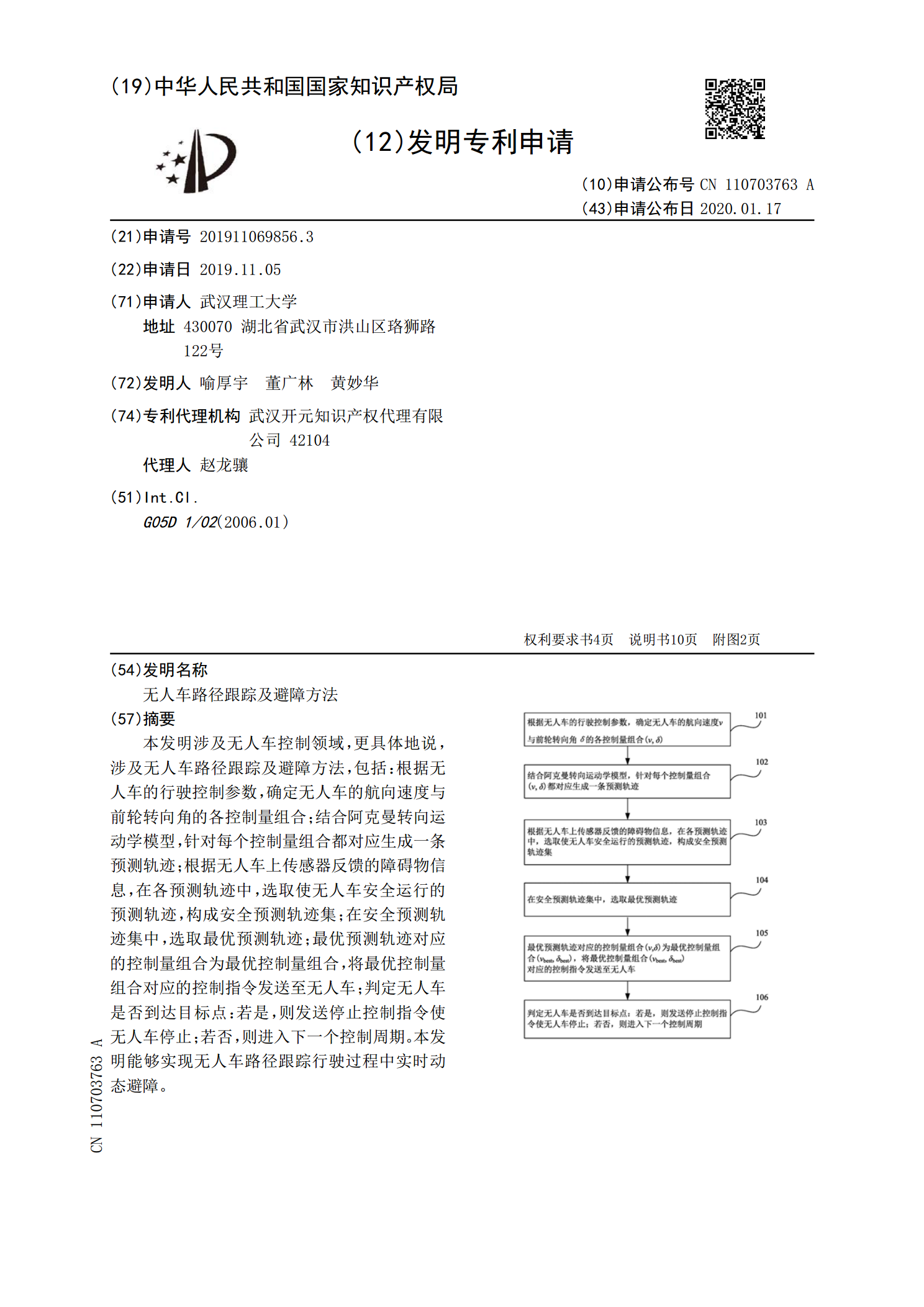
本发明涉及无人车控制领域,更具体地说,涉及无人车路径跟踪及避障方法,包括:根据无人车的行驶控制参数,确定无人车的航向速度与前轮转向角的各控制量组合;结合阿克曼转向运动学模型,针对每个控制量组合都对应生成一条预测轨迹;根据无人车上传感器反馈的障碍物信息,在各预测轨迹中,选取使无人车安全运行的预测轨迹,构成安全预测轨迹集;在安全预测轨迹集中,选取最优预测轨迹;最优预测轨迹对应的控制量组合为最优控制量组合,将最优控制量组合对应的控制指令发送至无人车;判定无人车是否到达目标点:若是,则发送停止控制指令使无人车停止

基于LGMD的无人机避障方法研究.pptx
基于LGMD的无人机避障方法研究01添加章节标题LGMD算法介绍算法起源和原理算法特点和优势算法应用领域无人机避障技术概述无人机避障需求避障技术分类避障技术发展现状基于LGMD的无人机避障方法设计方法设计思路LGMD算法改进避障系统架构实验验证与结果分析实验环境和条件实验过程和结果结果分析和讨论结论与展望研究结论研究不足与展望感谢观看

基于LGMD的无人机避障方法研究.docx
基于LGMD的无人机避障方法研究基于LGMD的无人机避障方法研究摘要:随着无人机技术的迅速发展,无人机在各个领域中的应用越来越广泛。然而,无人机在高速飞行过程中遇到的避障问题成为了限制其应用的一个重要因素。本文基于LGMD(lobulagiantmovementdetector,巨大的运动感受器)的无人机避障方法进行研究,通过对传感器数据的采集和分析,结合模式识别算法,实现了无人机的避障策略,提高了无人机飞行的安全性和可靠性。关键词:无人机;避障;LGMD;模式识别;安全性1.引言无人机的应用越来越广泛,
无人机避障方法及系统、无人机集群避障方法及系统.pdf
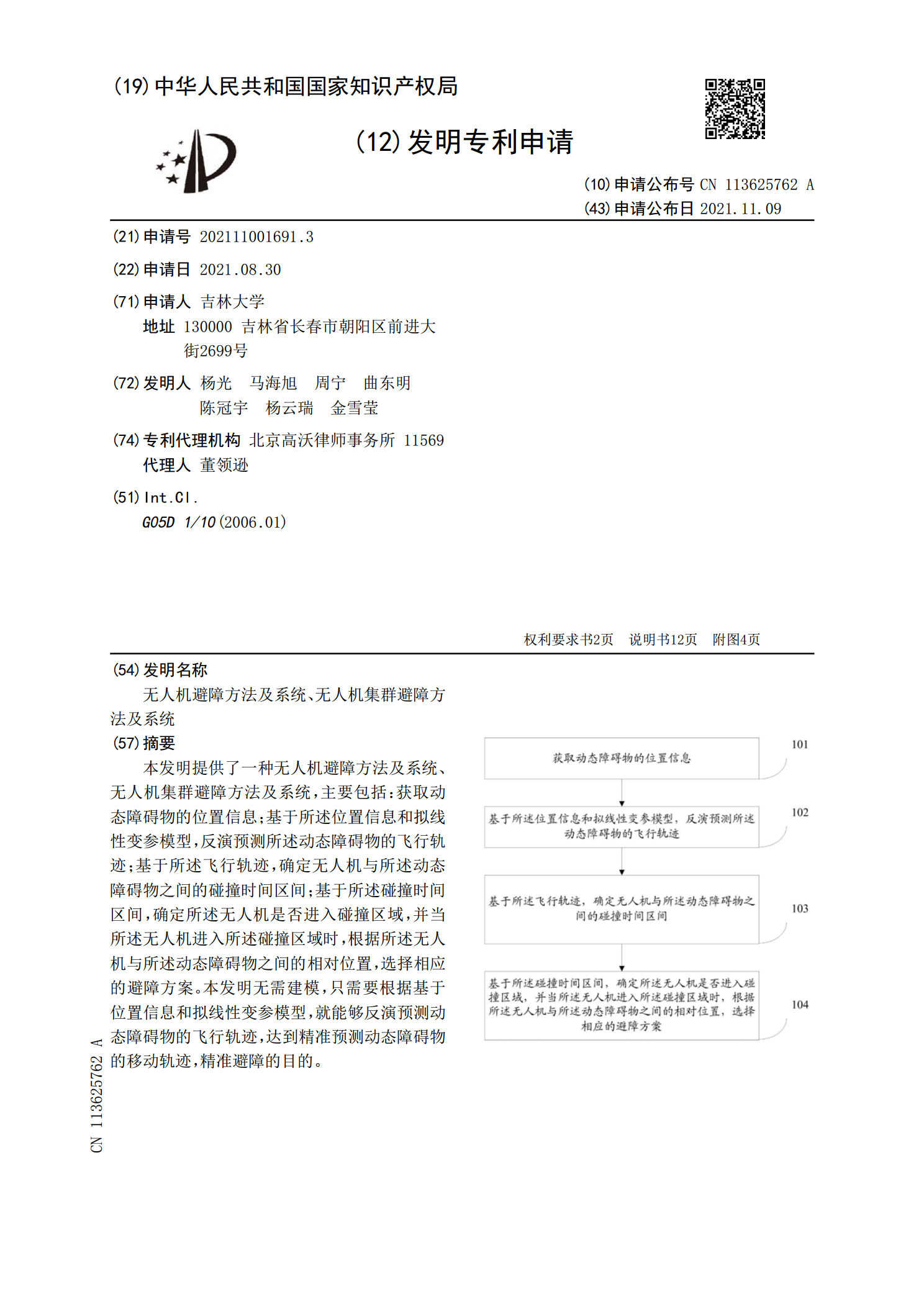
本发明提供了一种无人机避障方法及系统、无人机集群避障方法及系统,主要包括:获取动态障碍物的位置信息;基于所述位置信息和拟线性变参模型,反演预测所述动态障碍物的飞行轨迹;基于所述飞行轨迹,确定无人机与所述动态障碍物之间的碰撞时间区间;基于所述碰撞时间区间,确定所述无人机是否进入碰撞区域,并当所述无人机进入所述碰撞区域时,根据所述无人机与所述动态障碍物之间的相对位置,选择相应的避障方案。本发明无需建模,只需要根据基于位置信息和拟线性变参模型,就能够反演预测动态障碍物的飞行轨迹,达到精准预测动态障碍物的移动轨迹