
基于危险评估的自动紧急避撞控制策略.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于危险评估的自动紧急避撞控制策略.docx
基于危险评估的自动紧急避撞控制策略随着汽车技术的不断发展,自动紧急避撞系统已经成为一种越来越普遍的车载安全设备。自动紧急避撞系统旨在帮助驾驶员避免碰撞或减少碰撞的严重程度,在汽车事故中对于减少人员伤亡和财产损失有着重要的作用。本文主要探讨基于危险评估的自动紧急避撞控制策略。自动紧急避撞系统是一个重要的主动安全系统,它可以识别与汽车可能发生碰撞的障碍物和其他车辆,并采取适当的措施来避免或缓解碰撞。在自动紧急避撞系统中,危险评估是一个重要的环节,它需要识别所有潜在的危险情况,如交通拥堵、车辆变道、刹车、行人或

基于目标运动轨迹预测的自动紧急制动避撞策略.pptx
,目录PartOnePartTwo算法原理算法流程算法优势算法应用场景PartThree制动策略设计避撞策略设计策略优化方法策略评估标准PartFour系统架构设计系统模块功能系统实现流程系统测试与验证PartFive实际应用案例效果评估方法效果评估结果改进与优化建议PartSix算法改进与优化方向制动与避撞策略创新方向系统集成与智能化发展方向安全驾驶辅助领域应用前景THANKS
基于V2X的智能汽车交叉口自动紧急避撞控制方法.pdf
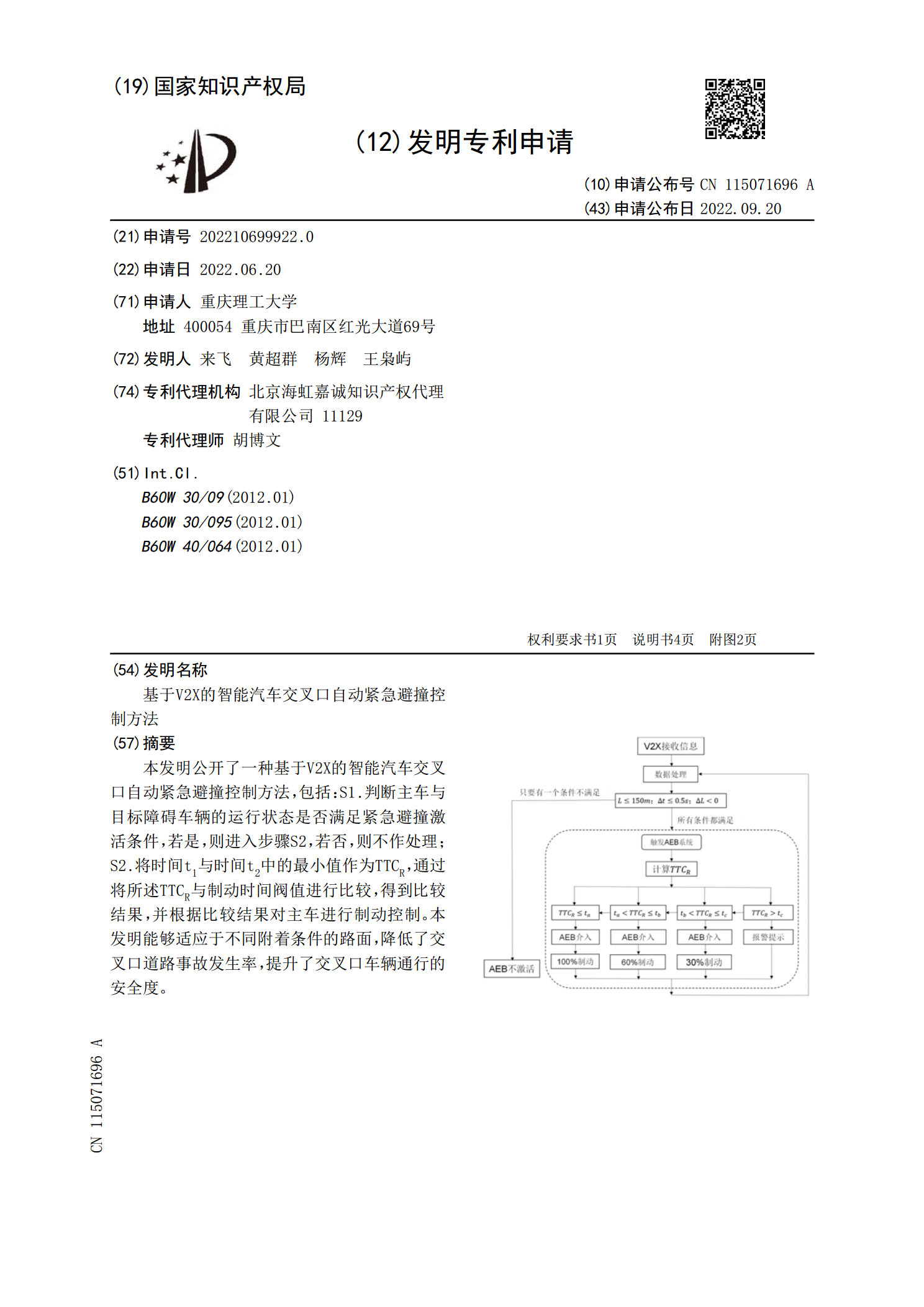
本发明公开了一种基于V2X的智能汽车交叉口自动紧急避撞控制方法,包括:S1.判断主车与目标障碍车辆的运行状态是否满足紧急避撞激活条件,若是,则进入步骤S2,若否,则不作处理;S2.将时间t<base:Sub>1</base:Sub>与时间t<base:Sub>2</base:Sub>中的最小值作为TTC<base:Sub>R</base:Sub>,通过将所述TTC<base:Sub>R</base:Sub>与制动时间阀值进行比较,得到比较结果,并根据比较结果对主车进行制动控制。本发明能够适应于不同附着条件

智能汽车紧急避撞轨迹规划与路径跟踪控制策略研究.docx
智能汽车紧急避撞轨迹规划与路径跟踪控制策略研究一、综述随着科技的不断发展,智能汽车已经成为了现代交通领域的一个重要研究方向。智能汽车通过将各种传感器、控制器和通信技术与车辆相结合,实现了对车辆的实时监控、故障诊断、自动驾驶等功能。在智能汽车的发展过程中,紧急避撞轨迹规划与路径跟踪控制策略的研究显得尤为重要。本文将对智能汽车紧急避撞轨迹规划与路径跟踪控制策略的现状进行综述,分析现有技术的优缺点,并提出一种新的解决方案,以期为智能汽车的发展提供理论支持和技术指导。尽管目前已经取得了一定的研究成果,但智能汽车紧

基于模型预测控制的汽车紧急转向避撞研究.pptx
汇报人:CONTENTS添加章节标题模型预测控制原理模型预测控制的定义和基本原理模型预测控制在汽车控制中的应用模型预测控制的优势和局限性汽车紧急转向避撞系统汽车紧急转向避撞系统的基本构成紧急转向避撞系统的关键技术紧急转向避撞系统的实现流程基于模型预测控制的汽车紧急转向避撞算法算法的基本思想算法的主要步骤和流程算法的关键技术问题及解决方案实验验证与结果分析实验环境和测试条件实验结果及分析结果与现有方法的比较结论与展望研究结论研究不足与展望汇报人: